 常見經典目標檢測算法:R-CNN、SPP-Ne
常見經典目標檢測算法:R-CNN、SPP-Ne
目標檢測是指在視頻或圖片序列中把感興趣的目標與背景區分,是在圖像中確定目標是否存在且確定目標位置的過程,是計算機視覺領域中的主要研究方向。
目標檢測主要應用于人臉識別、無人駕駛、指控和安防等領域,起到人工智能賦能傳統應用的作用。目標檢測的核心是算法。目前,目標檢測算法主要分為兩大類,第一類是基于手工設計特征的傳統算法,第二類是基于深度學習的目標檢測算法。
常見經典目標檢測算法
經典目標檢測算法有R-CNN、SPP-Net、Fast R-CNN和R-FCN等。
R-CNN:在CVPR 2014年中Ross Girshick提出R-CNN。R-CNN的全稱是Region-CNN,是第一個成功將深度學習應用到目標檢測上的算法。用CNN提取出Region Proposals中的featues,然后進行SVM分類與bbox的回歸。
完整R-CNN結構是不使用暴力方法,而是用候選區域方法(region proposal method),創建目標檢測的區域改變了圖像領域實現物體檢測的模型思路,R-CNN是以深度神經網絡為基礎的物體檢測的模型 ,R-CNN在當時以優異的性能令世人矚目,以R-CNN為基點,后續的SPPNet、Fast R-CNN、Faster R-CNN模型都是照著這個物體檢測思路。
SPP-Net:SPP-Net是一種可以不用考慮圖像大小,輸出圖像固定長度網絡結構,并且可以做到在圖像變形情況下表現穩定。SPP-net的效果已經在不同的數據集上面得到驗證,速度上比R-CNN快24-102倍。SPPNet在R-CNN的基礎上提出了改進,通過候選區域和Feature,map的映射,配合SPP層的使用從而達到了CNN層的共享計算,減少了運算時間,后面的FastR-CNN等也是受SPPNet的啟發。
Fast R-CNN:FastR-CNN的訓練速度是R-CNN的9倍,測試速度是R-CNN的213倍;即使和SPP-Net相比,Fast R-CNN的訓練速度和測試速度,也分別有了3倍和10倍的提升。相比R-CNN,Fast RCNN仍然使用selective search選取2000個建議框,但是這里不是將這么多建議框都輸入卷積網絡中,而是將原始圖片輸入卷積網絡中得到特征圖,再使用建議框對特征圖提取特征框。這樣做的好處是,原來建議框重合部分非常多,卷積重復計算嚴重,而這里每個位置都只計算了一次卷積,大大減少了計算量。
R-FCN:R-FCN,全稱為“Region-based fully convolutional network”。
R-FCN的網絡結構如下圖,同Faster RCNN比起來,它有2點不同。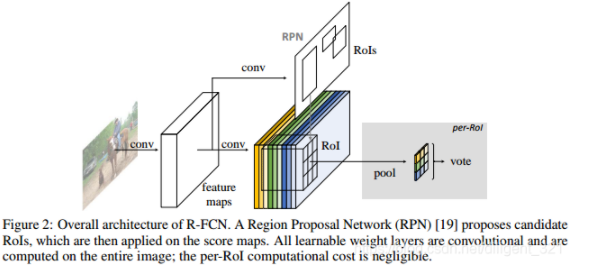
(1)Shared convolutional subnetwork不同。Faster RCNN是把RPN得到的RoI直接映射到Resnet101的最后一個卷積層(2048個channels),而R-FCN將Resnet101的最后一個卷積層映射到具有 ?個channels的特征層,作者將該特征層稱之為“position-sensitive score maps”,然后把RoI映射到該特征層;
?個channels的特征層,作者將該特征層稱之為“position-sensitive score maps”,然后把RoI映射到該特征層;
(2)RoI-wise subnetwork不同。Faster RCNN的subnetwork經過了全連接層做特征組合,然后執行分類和坐標回歸的雙任務,R-FCN基于pool和vote操作后得到的特征向量,執行分類任務。
-
算法
+關注
關注
23文章
4624瀏覽量
93122 -
目標檢測
+關注
關注
0文章
210瀏覽量
15641
發布評論請先 登錄
相關推薦
基于深度學習的目標檢測算法解析
PowerPC小目標檢測算法怎么實現?
基于YOLOX目標檢測算法的改進
介紹目標檢測工具Faster R-CNN,包括它的構造及實現原理

什么是Mask R-CNN?Mask R-CNN的工作原理
手把手教你操作Faster R-CNN和Mask R-CNN
基于改進Faster R-CNN的目標檢測方法


用于實例分割的Mask R-CNN框架
深入了解目標檢測深度學習算法的技術細節
PyTorch教程14.8之基于區域的CNN(R-CNN)

PyTorch教程-14.8。基于區域的 CNN (R-CNN)

無Anchor的目標檢測算法邊框回歸策略






 工商網監
工商網監
評論