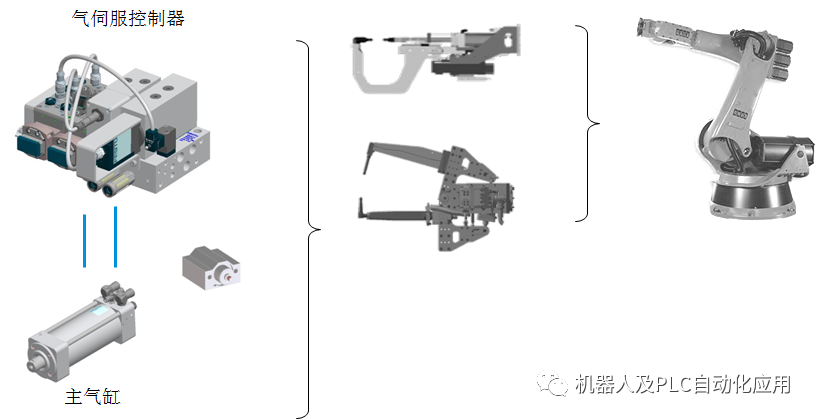
 一文淺析氣伺服焊鉗的一些要求
一文淺析氣伺服焊鉗的一些要求
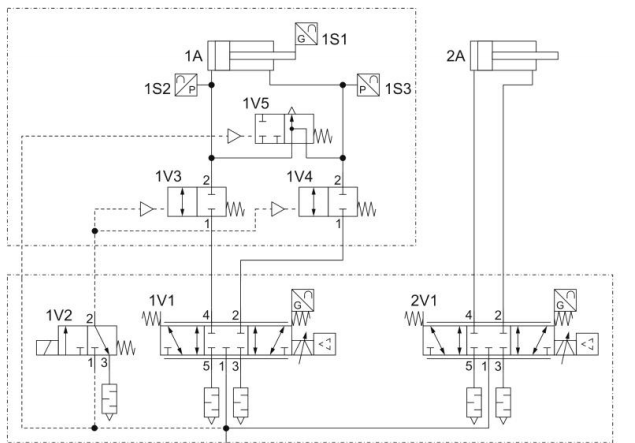
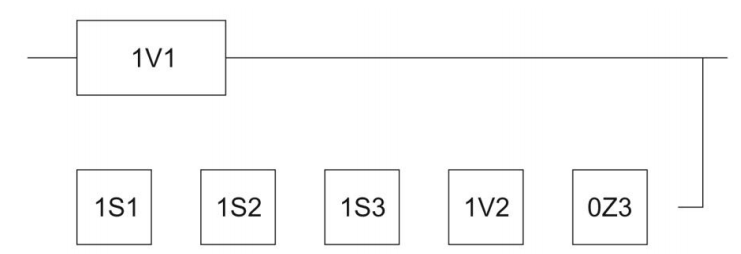
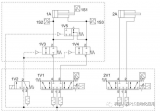
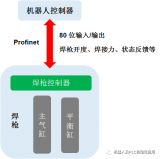
焊鉗氣動回路圖.
安全功能保護裝置免于啟動,負載電壓US2斷開
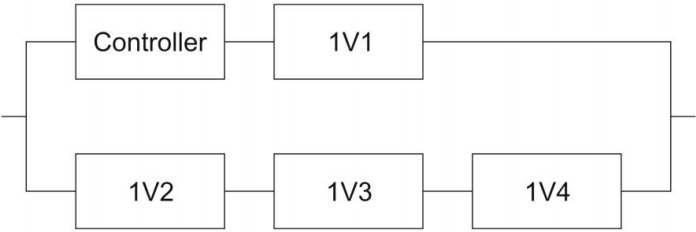
US2關閉時安全功能停止的結構
在不關閉US2的情況下安全功能停止的結構
1.公稱壓力 ,5 ... 10 bar.
2.最高 運營壓力, 12 bar.
3.允許的超壓(t = 1秒,無損壞), 16 bar max. 1 sec.
4.控制器主進氣口1的工作介質, 干燥空氣,未潤滑,壓力露點比中溫低至少10 K.
5.工作電壓–負載電源–邏輯電源24 V ±10 % ,24 V ±10 %.
6.工作電流(負載和邏輯電源).<4 A,僅當現場總線節點上未連接其他模塊和閥時.
7.最高 數字量輸出的允許負載電流, 250 mA.
8.環境溫度,0 ... +50 °C.
9.貯存溫度, -10 ... +60 °C.
10.中溫, 5 ... +40 °C.
11.最高 允許相對濕度,無凝結, 90 %
12.防護等級, IP 65.
13.電磁兼容–輻射干擾–抗干擾.
14.抗沖擊, 抗振性-----嚴重等級1.
1)必須在伺服箱的主壓縮空氣連接的前面安裝一個5 μm的過濾器(0Z1)。
2)所有連接必須使用適當的保護蓋密封。未使用的ProfiNet連接必須使用適當的插頭密封。
3)該組件旨在用于工業環境。
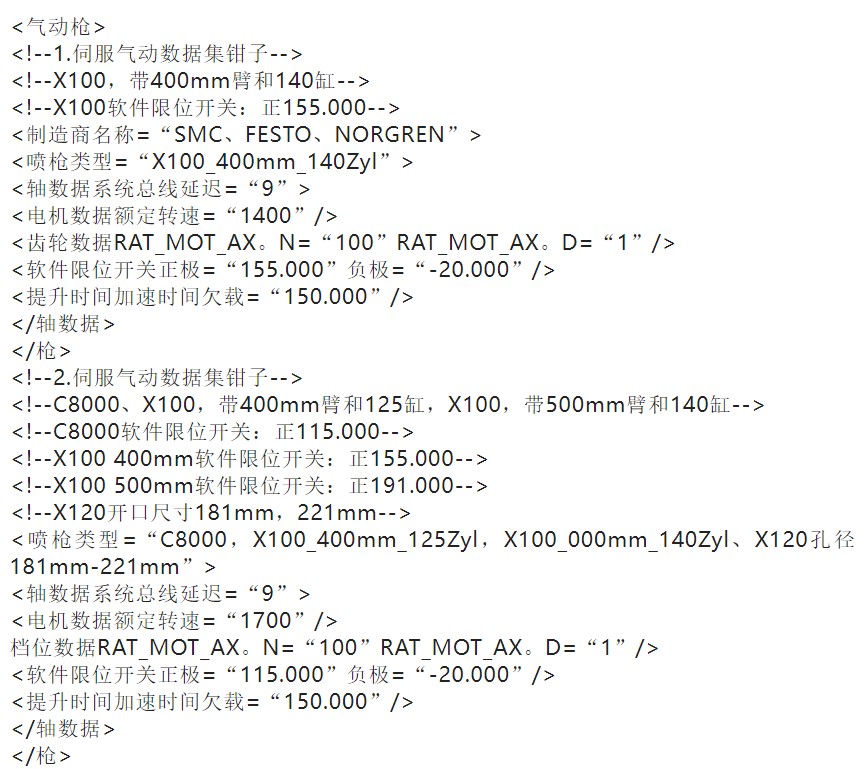
加載基本參數集 基本參數包括優化的參數 –位置控制 –力控制 –7.軸操作 –合適的氣缸類型 –電極帽參數
1.打開新項目
將打開包含標準參數文件的文件夾(..DefaultParameter)
2.選擇參數文件xxx.spz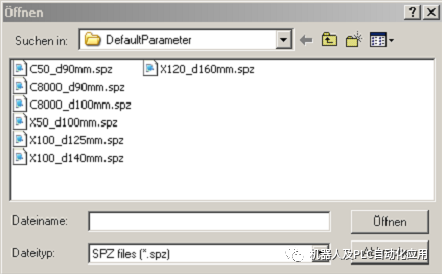
應為所有類型的焊槍存儲標準參數集。例如: 如果使用直徑為140mm的X100噴槍型號,請使用參數文件“X100_d140m.spz”。
3設置最大電極力
從噴槍的數據表或銘牌上插入最大電極力
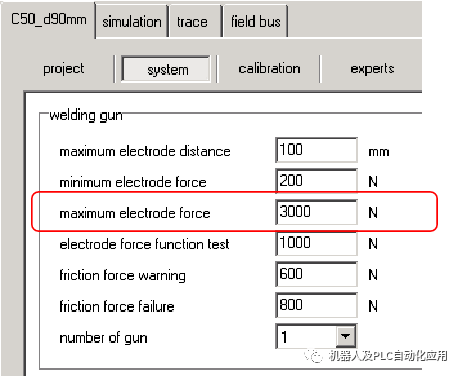
4將數據加載到控制器中

更換“90”氣缸位移傳感器說明
第1步: 將電路部分的密封蓋板上的4個螺絲旋開取下。
第2步: 將固定電路板的4個螺絲旋開取下
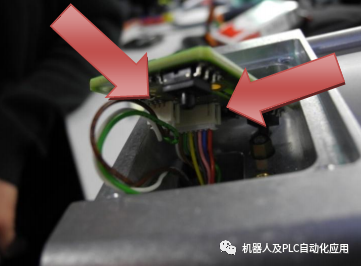
第3步: 取下電路板 - 取下電線插頭 - 注意保持
壓力傳感器的兩個O型密封圈的清潔!
第4步: 取下氣缸底部的卡簧。
第5步: 取出電纜插座
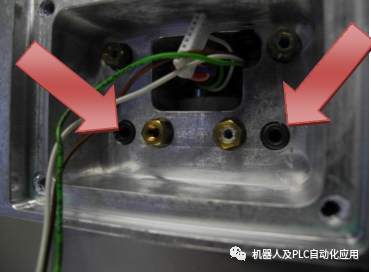
第6步 取下固定位位移傳感器的兩個螺絲。
第7步: 小心拉動電纜,將傳感器一起帶出來。
第8步: 將新的位移傳感器裝入氣缸 - 注意對準螺絲孔 - 使用Loctite螺紋膠 - 螺絲擰緊力為0.7 Nm
第9步: 通過內部的電纜導向將傳感器的電纜從頂部伸出。
第10步: 將插座裝入氣缸(不要安裝卡簧),然后將電纜的插頭插入到電路板上。 如果有需要的話可以使用鑷子。
第11步:
固定電路板
注意:
- 不要夾住電纜!
- 密封圈放置的位置正確
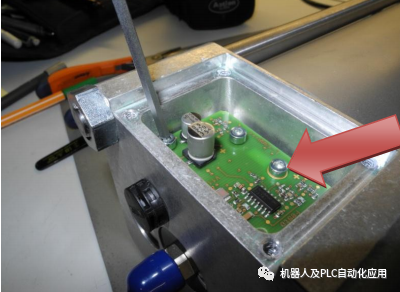
在螺絲上使用Loctite 243緊固膠,圖中箭頭所指的螺絲不要使用螺紋膠。
螺絲緊固力為0.7 Nm
第12步: 將電路板的蓋板蓋上 注意密封紙的位置
第13步: 在螺絲上使用Loctite 243 螺絲緊固力為2 Nm
第14步: 裝入卡簧
第15步: 在氣缸上面貼上DOM標簽,以標識更換過新的傳感器。
審核編輯:劉清
-
電磁兼容
+關注
關注
54文章
1889瀏覽量
97933 -
控制器
+關注
關注
112文章
16427瀏覽量
178901 -
過濾器
+關注
關注
1文章
432瀏覽量
19678
原文標題:氣伺服焊鉗的一些要求V12版
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
伺服調試的一些經驗總結
關于stm32的一些簡單的介紹
電伺服焊鉗銑削分析:用戶銑削

FESTO氣伺服焊鉗氣管接錯后故障分析


KUKA氣伺服焊鉗的一些要求和設置
氣伺服焊鉗為什么會發出鉗E1超出軟件限制報警
FESTO焊鉗故障報警分析
VASS KUKA電伺服焊鉗的SG_Background控制
氣伺服焊鉗的力超時故障分析





 工商網監
工商網監
評論