 如何設計控制環路?反激設計實例分析
如何設計控制環路?反激設計實例分析
引言
作為工程師,每天接觸的是電源的設計工程師,發現不管是電源的老手,高手,新手,幾乎對控制環路的設計一籌莫展,基本上靠實驗.靠實驗當然是可以的,但出問題時往往無從下手,在這里我想以反激電源為例子(在所有拓撲中環路是最難的,由于RHZ 的存在),大概說一下怎么計算,至少使大家在有問題時能從理論上分析出解決問題的思路。
01一些基本知識,零,極點的概念
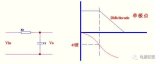
示意圖:
這里給出了右半平面零點的原理表示,這對用PSPICE 做仿真很有用,可以直接套用此圖。
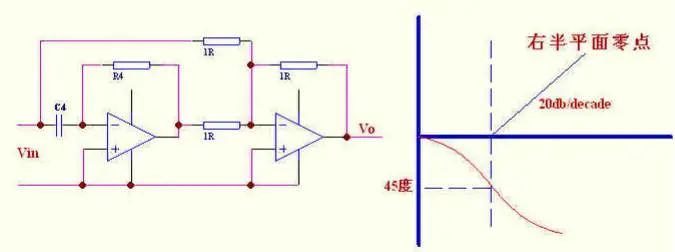
遞函數自己寫吧,正好鍛煉一下,把輸出電壓除以輸入電壓就是傳遞函數。
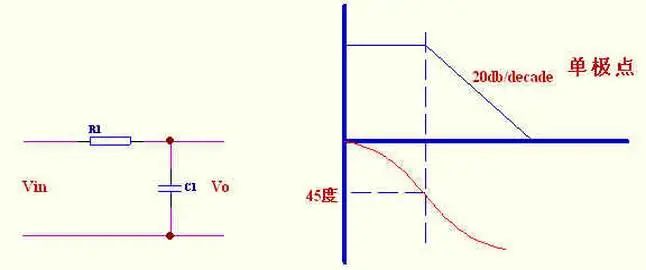
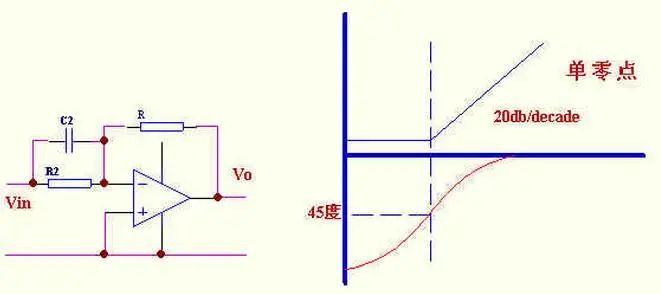
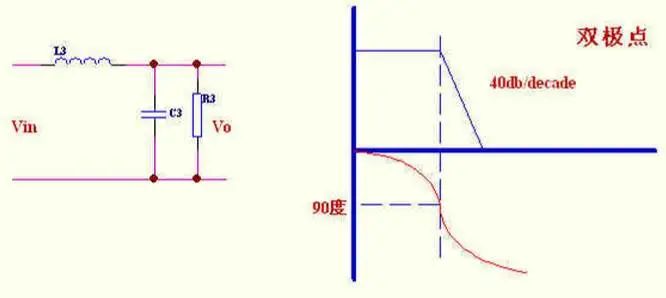
bode 圖可以簡單的判定電路的穩定性,甚至可以確定電路的閉環響應,就向我下面的圖中表示的.零,極點說明了增益和相位的變化。
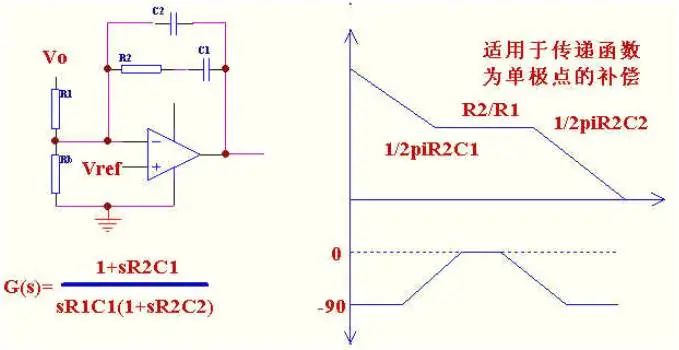
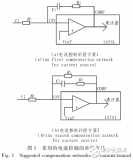
02單極點補償
適用于電流型控制和工作在DCM 方式并且濾波電容的ESR 零點頻率較低的電源.其主要作用原理是把控制帶寬拉低,在功率部分或加有其他補償的部分的相位達到180 度以前使其增益降到0dB. 也叫主極點補償。
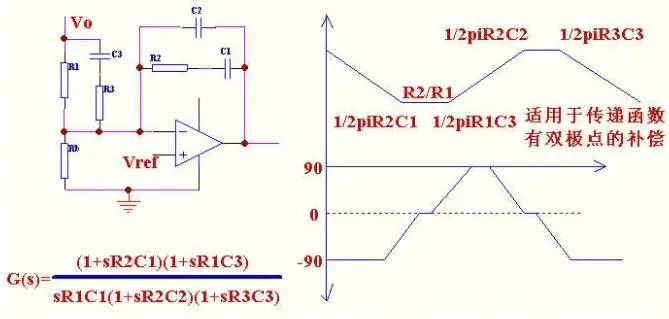
雙極點,單零點補償,適用于功率部分只有一個極點的補償.如:所有電流型控制和非連續方式電壓型控制。
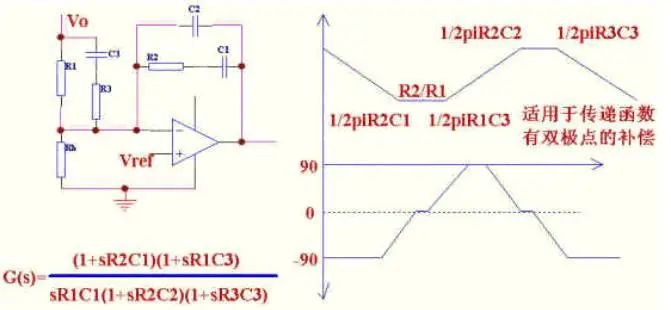
三極點,雙零點補償.適用于輸出帶LC諧振的拓撲,如所有沒有用電流型控制的電感電流連續方式拓撲。
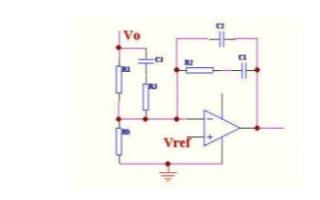
C1 的主要作用是和R2 提升相位的.當然提高了低頻增益.在保證穩定的情況下是越小越好。
C2 增加了一個高頻極點,降低開關躁聲干擾。
串聯C1 實質是增加一個零點,零點的作用是減小峰值時間,使系統響應加快,并且死循環越接近虛軸,這種效果越好.所以理論上講,C1 是越大越好.但要考慮,超調量和調節時間,因為零點越距離虛軸越近,死循環零點修正系數Q 越大,而Q 與超調量和調節時間成正比,所以又不能大.總之,考慮死循環零點要折衷考慮。
并聯C2 實質是增加一個極點,極點的作用是增大峰值時間,使系統響應變慢.所以理論上講,C2也是越大越好.但要考慮到,當零極點彼此接近時,系統響應速度相互抵消.從這一點就可以說明,我們要及時響應的系統C1 大,至少比C2 大。
03環路穩定的標準
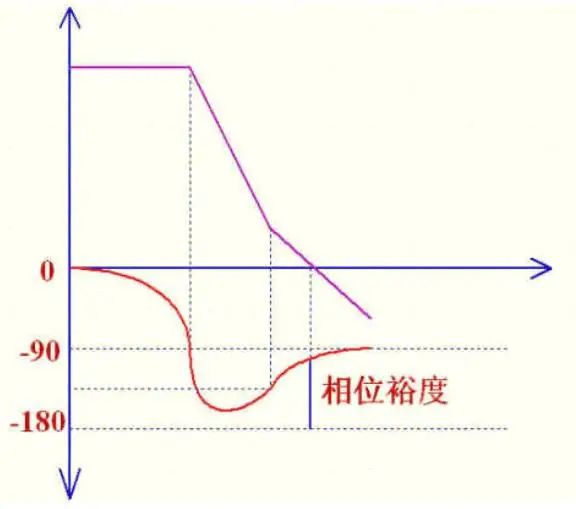
只要在增益為1 時(0dB)整個環路的相移小于360 度,環路就是穩定的。
但如果相移接近360 度,會產生兩個問題:1)相移可能因為溫度,負載及分布參數的變化而達到360 度而產生震蕩;2)接近360 度,電源的階躍響應(瞬時加減載)表現為強烈震蕩,使輸出達到穩定的時間加長,超調量增加.如下圖所示具體關系。
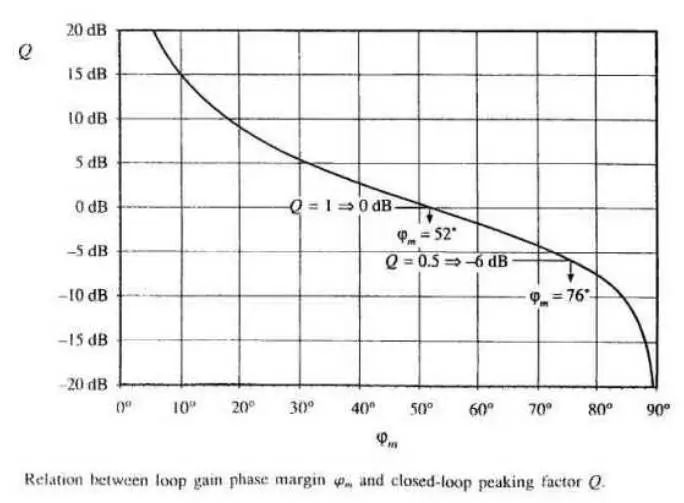
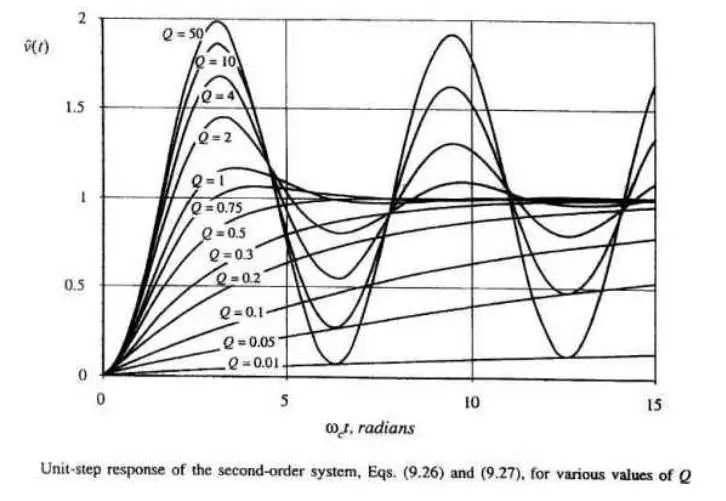
所以環路要留一定的相位裕量,如圖Q=1時輸出是表現最好的,所以相位裕量的最佳值為52度左右,工程上一般取45度以上.如下圖所示:
這里要注意一點,就是補償放大器工作在負反饋狀態,本身就有180度相移,所以留給功率部分和補償網絡的只有180度.幅值裕度不管用上面哪種補償方式都是自動滿足的,所以設計時一般不用特別考慮.由于增益曲線為-20dB/decade時,此曲線引起的最大相移為90度,尚有90度裕量,所以一般最后合成的整個增益曲線應該為-20dB/decade部分穿過0dB.在低于0dB帶寬后,曲線最好為-40dB/decade,這樣增益會迅速上升,低頻部分增益很高,使電源輸出的直流部分誤差非常小,既電源有很好的負載和線路調整率。
04如何設計控制環路?
經常主電路是根據應用要求設計的,設計時一般不會提前考慮控制環路的設計.我們的前提就是假設主功率部分已經全部設計完成,然后來探討環路設計.環路設計一般由下面幾過程組成:
1)畫出已知部分的頻響曲線;
2)根據實際要求和各限制條件確定帶寬頻率,既增益曲線的0dB頻率;
3)根據步驟2)確定的帶寬頻率決定補償放大器的類型和各頻率點.使帶寬處的曲線斜率為20dB/decade,畫出整個電路的頻響曲線。
上述過程也可利用相關軟件來設計:如pspice,POWER-4-5-6.一些解釋:
已知部分的頻響曲線是指除Kea(補償放大器)外的所有部分的乘積,在波得圖上是相加。
環路帶寬當然希望越高越好,但受到幾方面的限制:a)香農采樣定理決定了不可能大于1/2Fs;b)右半平面零點(RHZ)的影響,RHZ隨輸入電壓,負載,電感量大小而變化,幾乎無法補償,我們只有把帶寬設計的遠離它,一般取其1/4-1/5;c)補償放大器的帶寬不是無窮大,當把環路帶寬設的很高時會受到補償放大器無法提供增益的限制,及電容零點受溫度影響等.所以一般實際帶寬取開關頻率的1/6-1/10。
05反激設計實例
條件:輸入85-265V交流,整流后直流100-375V輸出12V/5A
初級電感量:370uH
初級匝數:40T 次級:5T
次級濾波電容:1000uFX3=3000uF
震蕩三角波幅度:2.5V 開關頻率:100K
電流型控制時,取樣電阻取0.33歐姆
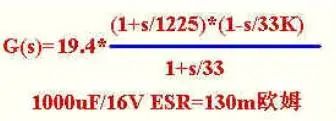
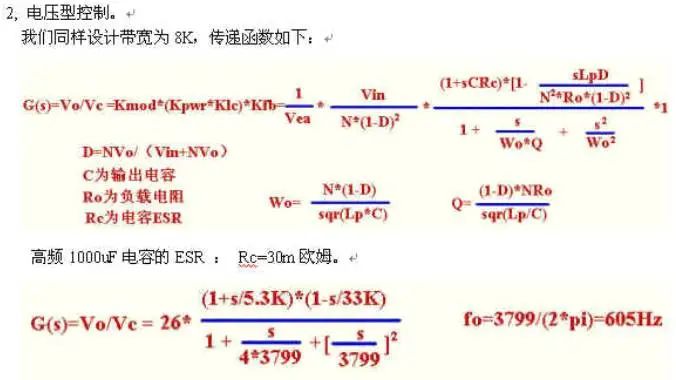
下面分電壓型和峰值電流型控制來設計此電源環路.所有設計取樣點在輸出小LC前面.如果取樣點在小LC后面,由于受LC諧振頻率限制,帶寬不能很高.1)電流型控制,假設用3842,傳遞函數如下:
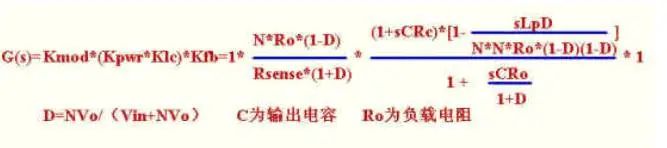
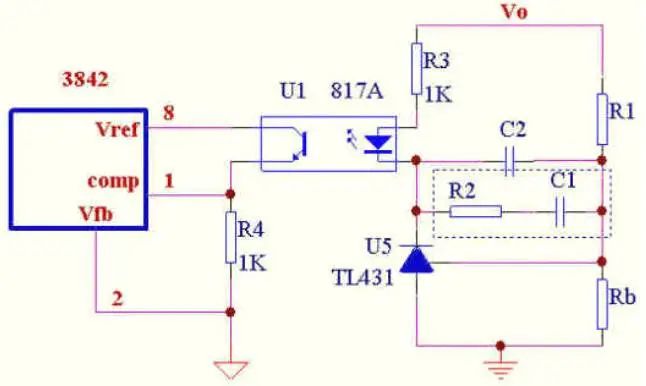
此圖為補償放大部分原理圖.RHZ的頻率為33K,為了避免其引起過多的相移,一般取帶寬為其頻率的1/4-1/5,我們取1/4為8K。
分兩種情況:
A)輸出電容ESR較大
輸出濾波電容的內阻比較大,自身阻容形成的零點比較低,這樣在8K處的相位滯后比較小.Phanseangle=arctan(8/1.225)-arctan(8/0.033)-arctan(8/33)=--22度。
另外可看到在8K處增益曲線為水平,所以可以直接用單極點補償,這樣可滿足-20dB/decade的曲線形狀.省掉補償部分的R2,C1。
設Rb為5.1K,則R1=[(12-2.5)/2.5]*Rb=19.4K。
8K處功率部分的增益為-20*log(1225/33) 20*log19.4=-5.7dB因為帶寬8K,即8K處0dB。
所以8K處補償放大器增益應為5.7dB,5.7-20*log(Fo/8)=0Fo為補償放大器0dB增益頻率Fo=1/(2*pi*R1C2)=15.42。
C2=1/(2*pi*R1*15.42)=1/(2*3.14*19.4*15.42)=0.53nF相位裕度:180-22-90=68度。
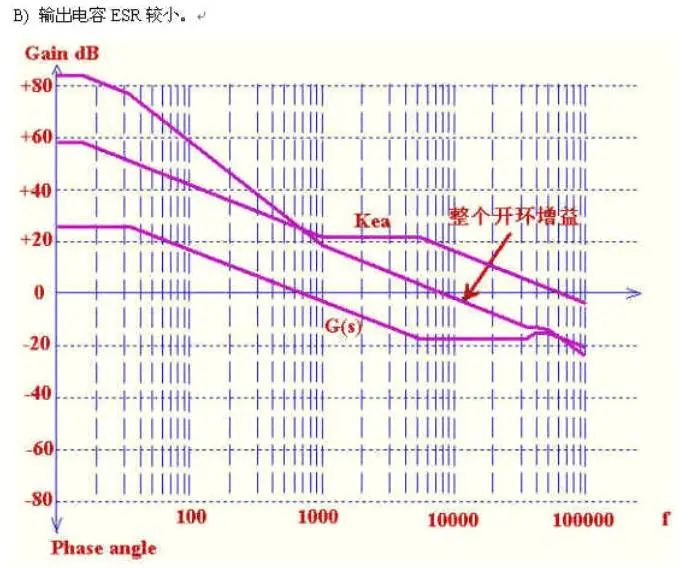
輸出濾波電容的內阻比較大,自身阻容形成的零點比較高,這樣在8K處的相位滯后比較大。
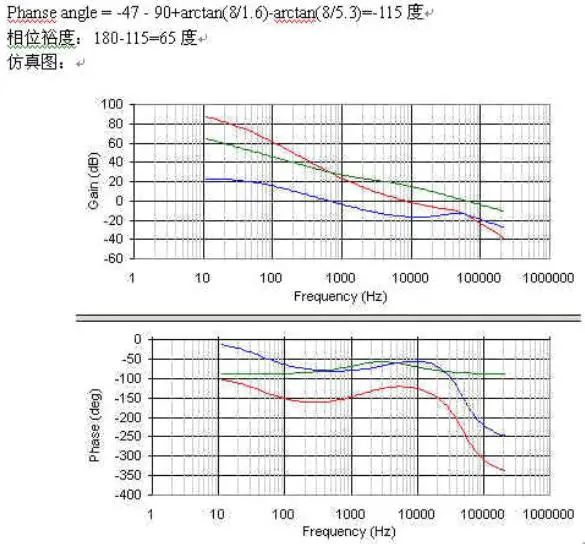
Phanseangle=arctan(8/5.3)-arctan(8/0.033)-arctan(8/33)=-47度,
如果還用單極點補償,則帶寬處相位裕量為180-90-47=43度,偏小,用2型補償來提升。
三個點的選取,第一個極點在原點,第一的零點一般取在帶寬的1/5左右,這樣在帶寬處提升相位78度左右,此零點越低,相位提升越明顯,但太低了就降低了低頻增益,使輸出調整率降低,此處我們取1.6K.第二個極點的選取一般是用來抵消ESR零點或RHZ零點引起的增益升高,保證增益裕度.我們用它來抵消ESR零點,使帶寬處保持-20db/10decade的形狀,我們取ESR零點頻率5.3K。
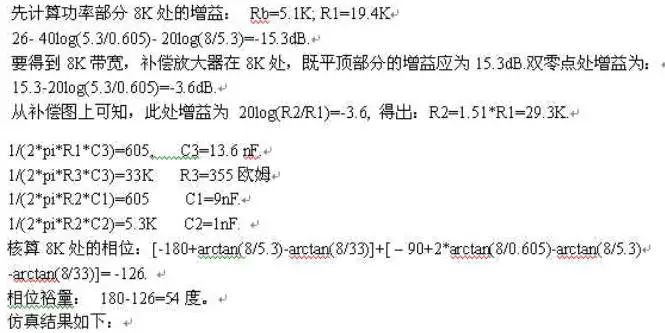
數值計算:
8K處功率部分的增益為-20*log(5300/33) 20*log19.4=-18dB,因為帶寬8K,即最后合成增益曲線8K處0dB,所以8K處補償放大器增益應為18dB,5.3K處增益=18 20log(8/5.3)=21.6dB水平部分增益=20logR2/R1=21.6,推出R2=12*R1=233Kfp2=1/2*pi*R2C2,推出C2=1/(2*3.14*233K*5.4K)=127pF.fz1=1/2*pi*R2C1,推出C1=1/(2*3.14*233K*1.6K)=0.427nF。
相位
fo為LC諧振頻率,注意Q值并不是用的計算值,而是經驗值,因為計算的Q無法考慮LC串聯回路的損耗(相當于電阻),包括電容ESR,二極管等效內阻,漏感和繞組電阻及趨附效應等.在實際電路中Q值幾乎不可能大于4—5。
由于輸出有LC諧振,在諧振點相位變動很劇烈,會很快接近180度,所以需要用3型補償放大器來提升相位.其零,極點放置原則是這樣的,在原點有一極點來提升低頻增益,在雙極點處放置兩個零點,這樣在諧振點的相位為-90 (-90) 45 45=-90.在輸出電容的ESR處放一極點,來抵消ESR的影響,在RHZ處放一極點來抵消RHZ引起的高頻增益上升。
元件數值計算,為方便我們把3型補償的圖在重畫一下。
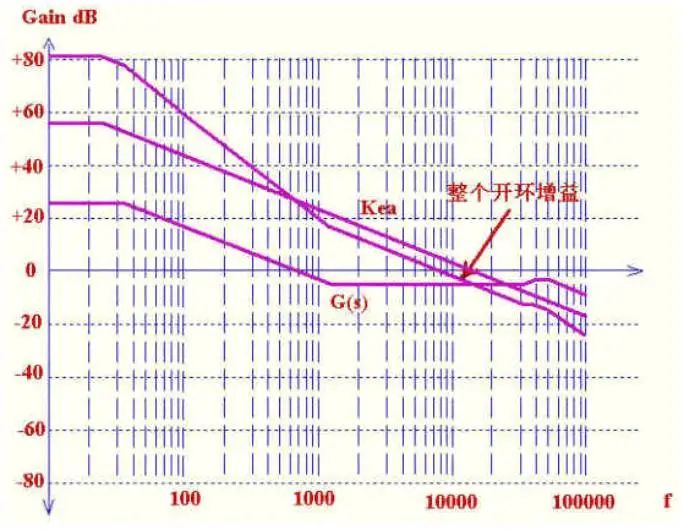
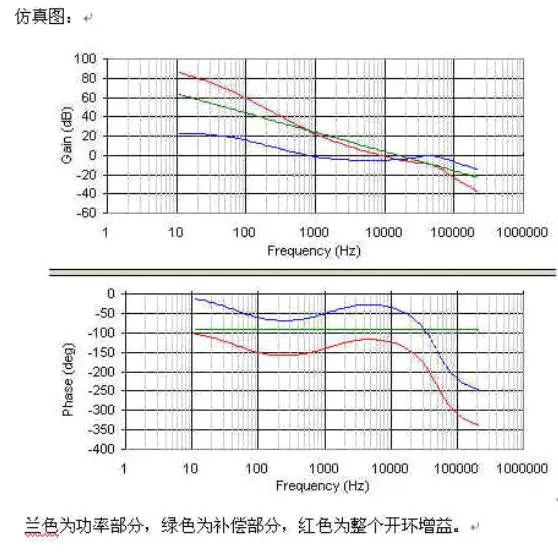
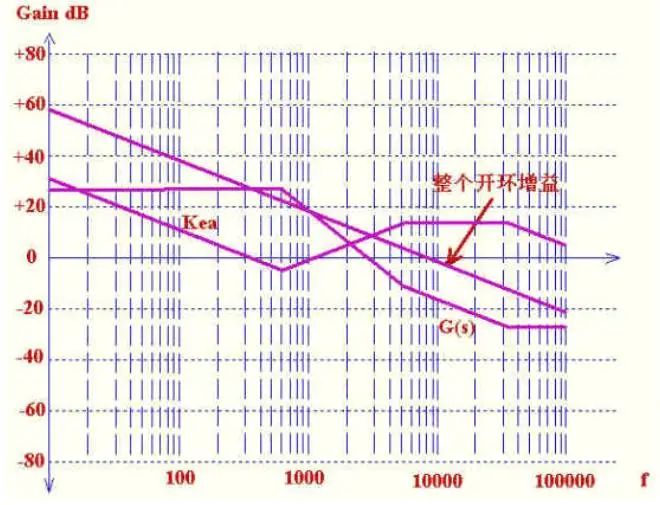
藍色為功率部分,綠色為補償部分,紅色為整個開環增益。如果相位裕量不夠時,可適當把兩個零點位置提前,也可把第一可極點位置放后一點。同樣假設光耦CTR=1,如果用CTR大的光耦,或加有其他放大時,如同時用IC的內部運放,只需要在波得圖上加一個直流增益后,再設計補償部分即可.這時要求把IC內部運放配置為比例放大器,如果再在內部運放加補償,就稍微麻煩一點,在圖上再加一條補償線結束。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17718瀏覽量
250170 -
放大器
+關注
關注
143文章
13589瀏覽量
213482 -
電路設計
+關注
關注
6674文章
2453瀏覽量
204361 -
反激電路
+關注
關注
7文章
44瀏覽量
21955 -
控制環路
+關注
關注
1文章
31瀏覽量
9486
原文標題:控制環路設計的解決思路,就這5個步驟
文章出處:【微信號:電子匯,微信公眾號:電子匯】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
反激電源的環路補償設計實例
反激開關電源中基于PC817A與TL431配合的環路動態補償設計
反激開關電源頻域分析設計
Topswitch 控制環路分析(實例)
開關電源的控制方式及高PF反激臨界模式開關電源的環路設計
反激電源的環路補償詳細分析
反激開關電源中基于PC817A與TL431配合的環路動態補償設計






 工商網監
工商網監
評論