 百度Apollo降維做L2+,能打擊誰?
百度Apollo降維做L2+,能打擊誰?
商業化——橫亙在所有自動駕駛公司面前刻不容緩的課題,哪怕對巨頭百度來說。 11月29日,Apollo Day技術開放日在線上舉行,百度自動駕駛核心負責人悉數到場,就高精地圖、大模型、數據閉環,自動駕駛運行條件以及AI芯片在內的自動駕駛各環節的核心技術情況進行了詳細的介紹,并計劃于2023年著力打造全球最大全無人自動駕駛運營服務區。 直到最后一個演講,百度智能駕駛事業群組技術委員會主席王亮才拋出核心話題:百度將在2023年推出一款L2+領航輔助駕駛旗艦產品ANP3.0。“今天L4技術降維L2+產品已經走通,我們能夠快速從0到1,打造領先的 ANP3.0產品就是很好的證明。“但走通技術,只是百度L2+智駕商業化漫漫征途的第一步。01ANP3.0:百度降維L2+
僅從目前透露的信息來看,ANP3.0整體方案和技術路線是看齊行業。 在功能上將ANP3.0將在國內率先支持復雜城市道路場景,并且銜接融通高速和泊車場景。 目前國內小范圍實現類似場景下的高階智能駕駛能力的主要有極狐阿爾法S HI版、小鵬P5,以及正在準備的魏牌摩卡DHT-PHEV激光雷達版。 硬件方案上,ANP3.0采用部分搭載了800萬像素高清攝像頭,視距可以達到400米。同時搭配state-of-the-art半固態激光雷達,每秒產生百萬以上的點云。 800萬攝像頭已是高階智能駕駛系統的標配。 激光雷達方面,阿爾法S HI版、P5和摩卡DHT-PHEV激光雷達版分別配備的是3顆華為96線混合固態激光雷達;2顆覽沃HAP144線半固態激光雷達,2顆速騰M1P 125線半固態激光雷達。 考慮到集度ROBO-01搭載的是禾賽科技AT128(128線)半固態激光雷達,百度的ANP3.0或許也有可能采用同款產品。計算平臺上,ANP3.0搭載2顆英偉達 Orin-x芯片,500 TOPS的AI算力比“對手“們都要高。 前述三家分別采用華為MDC810、英偉達Xavier和高通驍龍 8540+7nm 高通驍龍 9000 方案,算力分別為400TOPS、30TOPS和360TOPS。 有意思的是,昆侖芯二代芯片已經在百度的RoboTaxi系統上做了完全的適配, 也在實際的道路上做了使用。但目前ANP3.0仍將使用英偉達Orin,而未直接采用昆侖芯來加強協同效應。 算法模型上,ANP3.0以視覺方案為主,配備激光雷達作為安全冗余。 ANP3.0所搭載的第二代純視覺感知系統Apollo Lite++通過Transformer把前視特征轉到BEV,在特征層面對相機觀測進行前融合后,直接輸出三維感知結果,并融合時序特征實現運動估計Learning化。 “ANP3.0的視覺、激光雷達兩套系統獨立運作、低耦合。大概率是國內唯一能夠做到真冗余的環境感知方案。“王亮在演講中表示。 值得注意的是,隨著智能駕駛系統面向城市領航的高階進發,重感知已成為大部分玩家共同的選擇,中融合,甚至前融合方案亦是層出不窮。百度所采用的后融合方案似乎是“逆潮流“,但另一方面或也是出去其對自己視覺感知能力的自信。 不久前,同樣的L4玩家輕舟智航推出了L2+級的量產產品,在行業內首次將時序多模態特征融合的大模型(OmniNet)部署在量產平臺上,以一個神經網絡即可實現視覺、激光雷達、毫米波雷達在BEV空間和圖像空間上輸出多任務結果。 02ANP3.0的底氣 ANP3.0也很有百度特色。
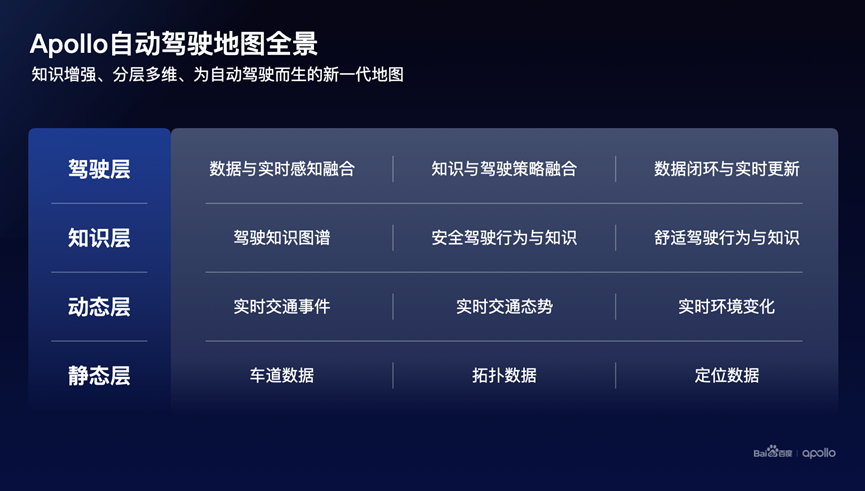
行業內,“重感知、輕地圖”的高階方案眾多,但王亮表示:“在今天做城市級高級輔助駕駛,高精地圖是安全、體驗好智駕產品的必需品,是Must-have。” 這當然首先是基于百度在高精地圖領域的固有能力。而為了解決高精地圖的泛化和鮮度問題,百度通過精益車端算法,通過提升容錯能力,大幅度降低地圖制作成本。 例如,在通過線上PNC(規劃與控制)算法優化和地圖點云拼接算法的升級,提升對地圖精度誤差的容錯力,每條路線僅需要采集1次即可制圖,大幅降低了地圖生產的外業成本。 定位算法降低對點云和特征點的依賴,僅依靠Landmark(陸標)定位圖層即可支撐 ANP3.0的城市道路高精自定位。

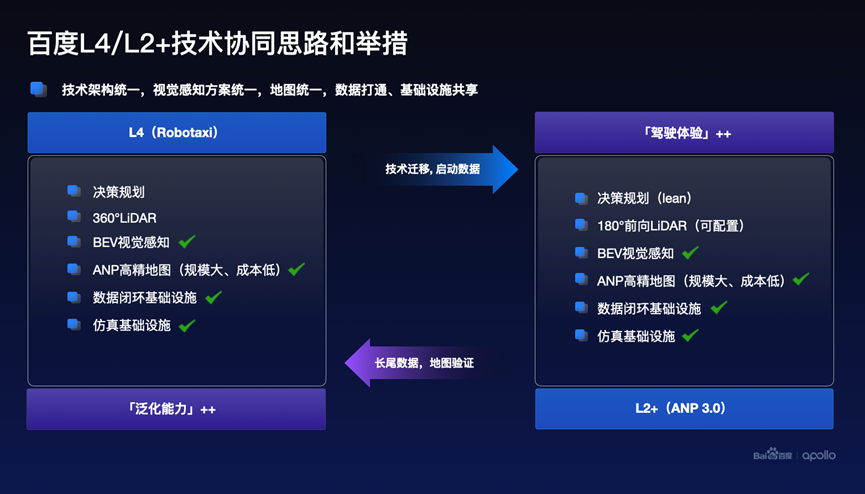
在更加核心的數據閉環方面,王亮表示結合百度在AI、云計算和自動駕駛的積累,為內外部用戶打造了一款數據閉環SaaS(軟件即服務)產品。通過對數據挖掘、標注、模型訓練、仿真驗證的全 生命周期管理,實現數據驅動智駕能力進化。 在此次技術日上:百度提出了以高提純、高消化為核心驅動力的數據閉環設計思路。高提純通過小模型和大模型的車云協同,實現高效的數據挖掘和自動化標注;而高消化則通過數據、模型、指標的集中式、端到端整合來實現。 而且,百度希望2023年后ANP3.0數據能夠反哺L4。 在過去兩年,百度進行了L4、L2+整體技術架構的統一,視覺BEV方案的統一, 輕量化高精地圖的統一,同時兩邊數據打通,數據閉環和仿真基礎設施、配套工具鏈完全共享。03商業化尋路在技術日上,百度充分展示了在自動駕駛領域的技術和體系上的“肌肉”,但要從L4降維到L2+并不是“技術好“就可以了。 目前,除自家投資的集度、威馬之外,百度自動駕駛能力的商業化落地項目,只有此前傳言的比亞迪。 今年年初,據媒體報道,比亞迪選擇百度為其智能駕駛供應商。百度向比亞迪提供行泊一體的ANP智駕產品與人機共駕地圖。百度智駕團隊已經提前進場配合比亞迪進行開發,不久將實現合作車型量產。 但2022年即將結束,百度和比亞迪仍未有合作的官宣。 《電動汽車觀察家》了解到,百度此前確實與比亞迪就智能駕駛系統合作進行了較為深入的接觸,但后期進展如何卻不得而知。“比亞迪SOP要求的時間很緊,選擇供應商也很謹慎。”

“把L4的技術拿過來,做一個本土新型專業Tier1業務。”王亮在接受媒體采訪時層這樣表示。 無法忽視的是,雖然擁有完整的自動駕駛技術體系,但在量產市場,百度仍是缺乏經驗的“新手”。要做乙方,量產經驗有時比技術更重要。 “我們遇到過算法能力非常強的競爭對手,但沒有進入最終PK的環節,就是因為基本功沒做好。“一位智能駕駛T1供應商表示,”整個的體系、平臺、功能安全、信息安全、車規級實時的能力,這些基本功是車企更看重的門檻。只有進門之后才開始拼特色,定制化,不管任何需求都能完成。“ 2023年,集度的首款產品即將交付。百度在集度身上學到的造車本領,或將成為其L2+的技術能力能否真正降維打擊到市場的決定性因素。
審核編輯 :李倩
-
算法
+關注
關注
23文章
4622瀏覽量
93063 -
智能駕駛
+關注
關注
3文章
2551瀏覽量
48806 -
Apollo
+關注
關注
5文章
342瀏覽量
18474
原文標題:百度Apollo降維做L2+,能打擊誰?
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論