 基于QT的Modbus RTU主站上位工具設計
基于QT的Modbus RTU主站上位工具設計
Modbus是一種常見的工業系統通訊協議。在我們的設計開發工作中經常使用到它。在這一篇中我們將簡單實現一個基于QT的Modbus RTU主站上位工具。
1、概述
??Modbus RTU主站應用很常見,有一些是通用的,有一些是專用的。而這里我們希望實現一個主要針對我們的產品調試的Modbus RTU主站工具。
??在開始軟件設計之前,我們先來簡略地分析一下,實現這樣一個Modbus RTU主站工具包含的主要內容有哪些。我們認為軟件需要如下幾個方面的內容:
(1)、串口參數的配置
??Modbus RTU通過串口來實現通訊,所以我們需要對串口相關的參數進行配置。對串口的配置主要是串口名、波特率、校驗位、數據位和停止位等。對于這些參數我們讓使用者可以根據需要選擇。
??而串口號,我們希望軟件可以自動搜索當前可用的串口列表。而且我們可以通過操作更新可用的串口列表。對串口的操作主要是串口的打開與關閉。
(2)、從站信息的配置
??我們實現Modbus RTU主站應用就是訪問從站的數據,所以我們需要在主站應用中配置從站的信息。主要有站地址、數據類型、數據格式等,我們將其設置為可以選擇。
讀取從站的參數配置,主要是起始地址、讀取的數量。寫從站參數的配置,主要是起始地址、寫入的數量以及寫入的數值。
(3)、對從站的操作
??Modbus RTU主站對從站的操作無非是讀從站數據和寫從站數據,我們通過制定讀寫的寄存器類型、起始地址、數量等通過按鈕操作來實現讀寫命令的發送。
??除了手動操作讀寫外,很多時候我們可能需要Modbus RTU主站自動周期性的讀取從站的數據。所以我們讓其可以選擇以多長的周期自動循環讀取。
(4)、對信息的顯示
??接收信息的顯示,作為一款工具軟件, 我們當然希望看到我們發給從站的命令究竟有沒有成功,最簡單的和直觀的辦法就是將接收到的信息顯示出來。對于Modbus RTU主站當然是顯示對應的地址的值。
??同樣的,我們有時候想要看到發送和接收到的原始報文,所以我們對發送和接收到的報文也作相應的顯示。
??對于個別數據有時候我們還希望看到他的變化趨勢,所以我們可以添加一個圖形顯示,用以顯示我們制定的數據的變化趨勢。
??運行狀態的顯示, 我們希望對操作的狀態進行反饋以指示操作的動作是否執行,所以我們需要狀態欄來實現這一需求。
2、界面設計
??根據上一節中分析的需求,我們先來設計軟件的界面。我們在QT中基于QMainWindow類生成一個操作界面,包括菜單欄、工具欄和狀態欄以滿足需求中對狀態顯示及操作命令的要求。
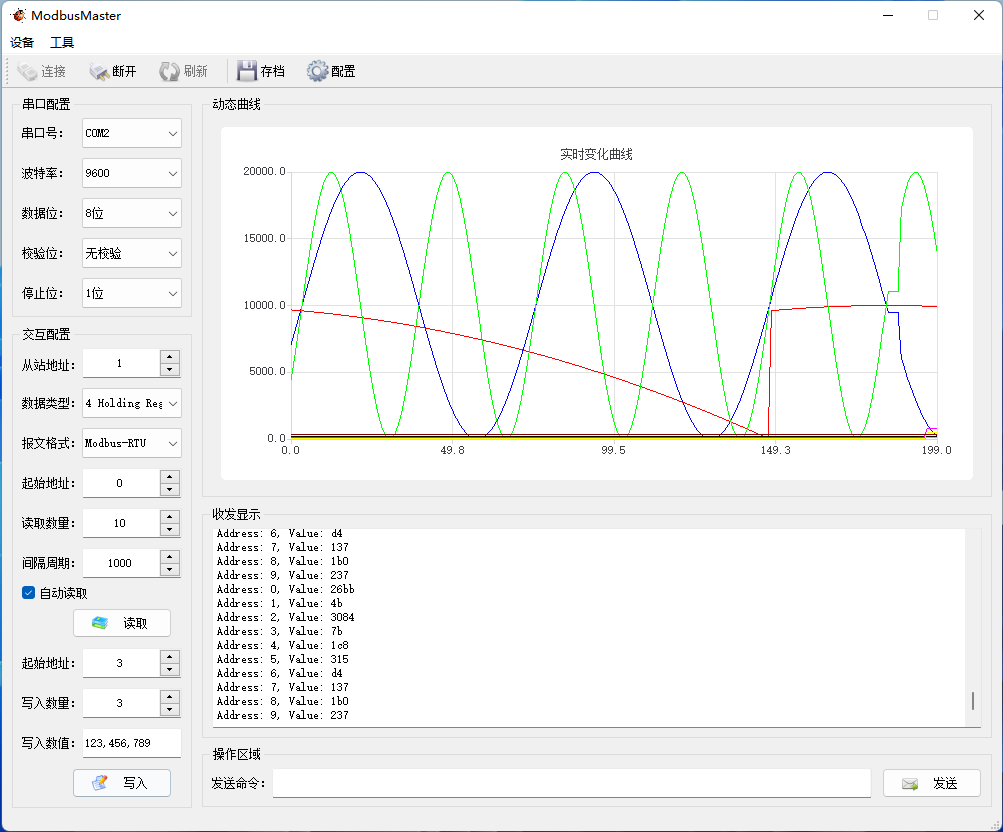
??而在中間顯示區域,我們將其劃分為2列。在左邊的一列從上到下設置:串口配置操作區域和讀寫從站的交互配置區域。在右側的一列從上到下設置:動態曲線顯示區域、收發消息顯示區域以及直接輸入報文發送命令的輸入區域。具體的界面設置如下圖所示:
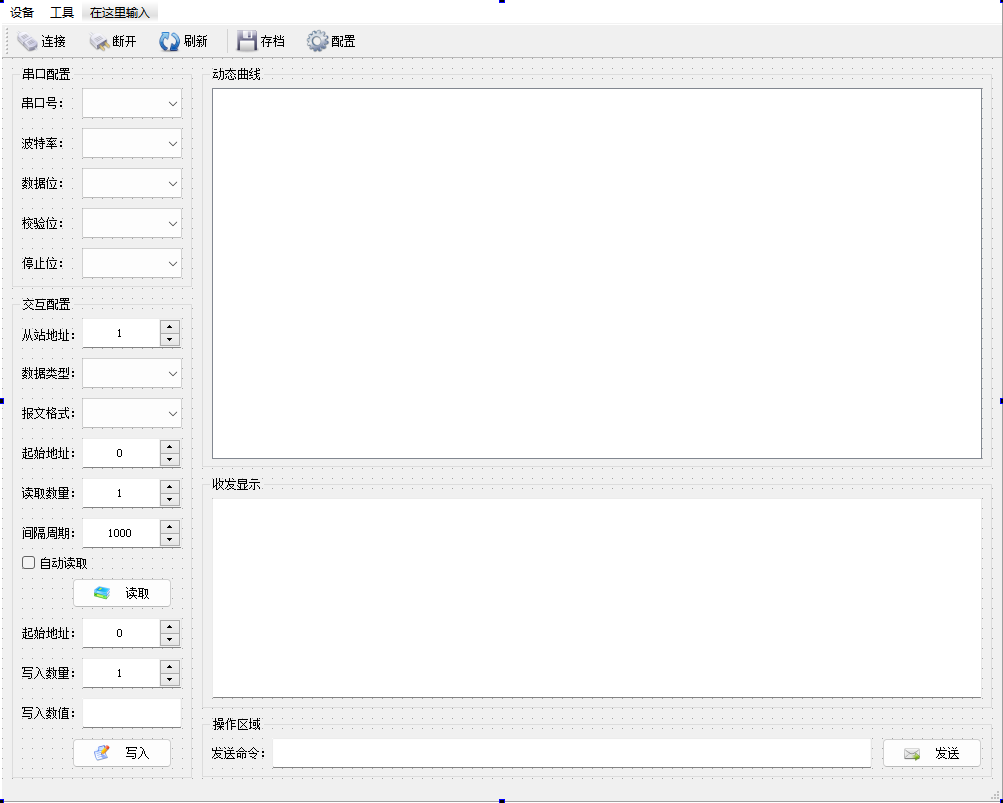
??完成如上圖的布局后,我們可以選擇在屬性中配置控件的參數,也可以在代碼中添加相關的參數。在這里在代碼中通過初始化形式完成參數的設置。完成整個布局后我們先試著運行程序,正常運行則出現如下的界面:
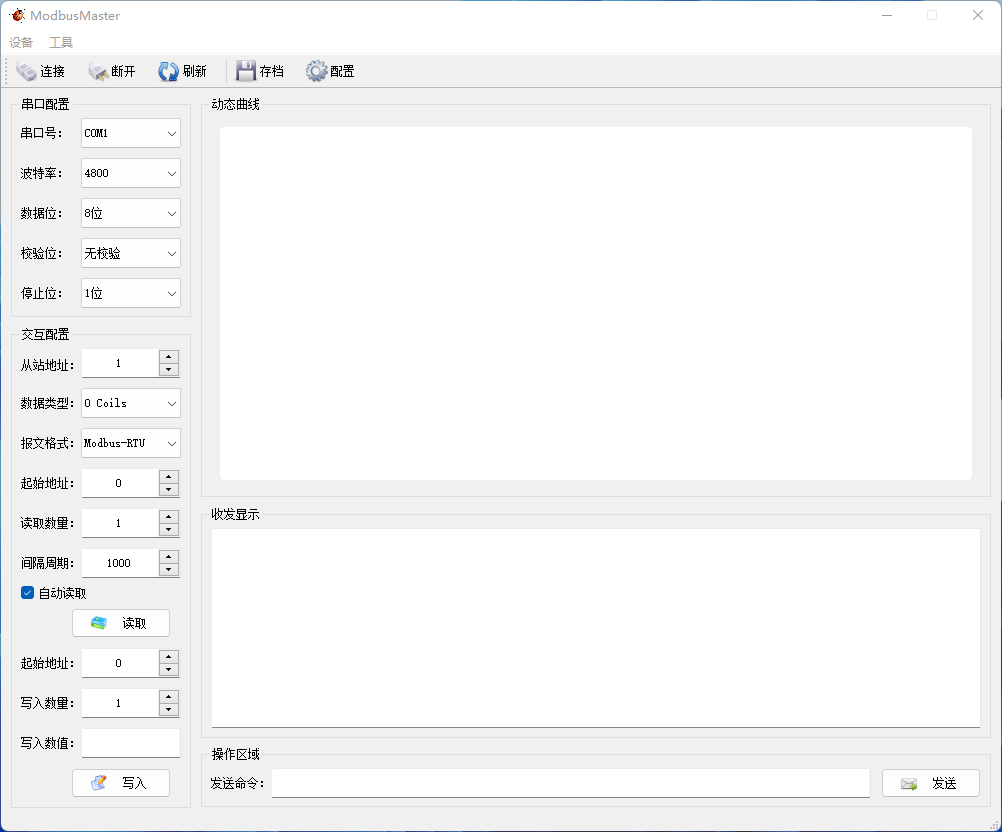
??上圖就是完成布局后的運行界面,不過我們還沒有實現相應的編碼,所以目前尚不能實現我們第一節中所預想的功能。
3、編碼實現
??接下來這一小節,我們將來編碼實現相應的功能。我們主要將功能分為串口操作功能、從站操作功能以及信息顯示功能三個部分來實現。
3.1、串口操作功能
??對串口的操作首先就是對串口參數的設置。我們在代碼中對界面上的串口號、波特率、數據位、校驗位和停止位的ComboBox控件進行初始化。其中串口號通過自動搜索當前可用的串口來實現。具體的實現方式如下:
//搜索串口
void MainWindow::SearchSerialPorts()
{
ui->comboBoxPort->clear();
foreach(const QSerialPortInfo &info,QSerialPortInfo::availablePorts())
{
ui->comboBoxPort->addItem(info.portName());
}
}
??對串口的操作主要是串口的打開和關閉,在這里因為是Modbus RTU主站應用,我們稱之為連接和斷開。建立或斷開與從站的連接實際就是對串口的配置與操作,只是針對Modbus RTU作了一些封裝,具體實現如下:
//串口連接
void MainWindow::on_actionConnect_triggered()
{
if (!modbusDevice)
return;
modbusDevice->setConnectionParameter(QModbusDevice::SerialPortNameParameter,ui->comboBoxPort->currentText());
modbusDevice->setConnectionParameter(QModbusDevice::SerialBaudRateParameter,ui->comboBoxBaud->currentText().toInt());
switch(ui->comboBoxParity->currentIndex()) //設置奇偶校驗
{
case 0: modbusDevice->setConnectionParameter(QModbusDevice::SerialParityParameter,QSerialPort::NoParity);break;
default: break;
}
switch(ui->comboBoxData->currentIndex()) //設置數據位數
{
case 1:modbusDevice->setConnectionParameter(QModbusDevice::SerialDataBitsParameter,QSerialPort::Data8);break;
default: break;
}
switch(ui->comboBoxStop->currentIndex()) //設置停止位
{
case 1: modbusDevice->setConnectionParameter(QModbusDevice::SerialStopBitsParameter,QSerialPort::OneStop);break;
case 2: modbusDevice->setConnectionParameter(QModbusDevice::SerialStopBitsParameter,QSerialPort::TwoStop);break;
default: break;
}
modbusDevice->setTimeout(1000);
modbusDevice->setNumberOfRetries(3);
if (modbusDevice->connectDevice())
{
//開啟自動讀取
if(ui->checkBoxAuto->isChecked())
{
connect(pollTimer,&QTimer::timeout, this, &MainWindow::ReadRequest);
pollTimer->setInterval(ui->spinBoxInterval->value());
pollTimer->start();
}
//連接槽函數
//QObject::connect(serialPort, &QSerialPort::readyRead, this, &MainWindow::ReadSerialData);
// 設置控件可否使用
ui->actionConnect->setEnabled(false);
ui->actionDisconnect->setEnabled(true);
ui->actionRefresh->setEnabled(false);
}
else //打開失敗提示
{
QMessageBox::information(this,tr("錯誤"),tr("連接從站失敗!"),QMessageBox::Ok);
}
}
3.2、從站操作功能
??在前面一節中我們已經設計過,對從站的操作包括手動按鈕讀取從站數據、手動按鈕寫入從站數據以及自動周期讀取從站數據。
??手動讀取從站數據是指點擊按鈕時觸發一次讀從站的操作,而從站的地址、讀取的寄存器類型、讀取的寄存器起始地址和寄存器的數量均根據界面上相應的設置確定。具體的實現如下:
//讀數據請求
void MainWindow::ReadRequest()
{
if (!modbusDevice)
{
QMessageBox::information(NULL, "Title", "尚未連接從站設備");
return;
}
QModbusDataUnit::RegisterType type;
switch(ui->comboBoxDataType->currentIndex())
{
case 0:type=QModbusDataUnit::Coils;break;
case 1:type=QModbusDataUnit::DiscreteInputs;break;
case 2:type=QModbusDataUnit::InputRegisters;break;
case 3:type=QModbusDataUnit::HoldingRegisters;break;
default:type=QModbusDataUnit::Invalid;
}
int startAddress = ui->spinBoxStartRead->value();
Q_ASSERT(startAddress >= 0 && startAddress < 10);
// do not go beyond 10 entries
quint16 numberOfEntries = qMin(quint16(ui->spinBoxNumberRead->value()), quint16(10 - startAddress));
QModbusDataUnit readUnit=QModbusDataUnit(type, startAddress, numberOfEntries);
statusBar()->clearMessage();
if (auto *reply = modbusDevice->sendReadRequest(readUnit, ui->spinBoxStation->value()))
{
if (!reply->isFinished())
connect(reply, &QModbusReply::finished, this, &MainWindow::ReadSerialData);
else
delete reply; // broadcast replies return immediately
}
else
{
statusBar()->showMessage(tr("Read error: ") + modbusDevice->errorString(), 5000);
}
}
??手動寫從站操作是指點擊按鈕觸發一次寫從站操作,而從站的地址、寫入的寄存器類型、寫入的寄存器起始地址、寫入的寄存器的數量以及寫入的值均根據界面上相應的設置確定。而寄存器的值得輸入以“,”分割,具體的實現如下:
//寫數據請求
void MainWindow::WriteRequest(QList values)
{
if (!modbusDevice)
{
QMessageBox::information(NULL, "Title", "尚未連接從站設備");
return;
}
QModbusDataUnit::RegisterType type;
switch(ui->comboBoxDataType->currentIndex())
{
case 0:type=QModbusDataUnit::Coils;break;
case 1:type=QModbusDataUnit::DiscreteInputs;break;
case 2:type=QModbusDataUnit::InputRegisters;break;
case 3:type=QModbusDataUnit::HoldingRegisters;break;
default:type=QModbusDataUnit::Invalid;
}
int startAddress = ui->spinBoxStartWrite->value();
Q_ASSERT(startAddress >= 0 && startAddress < 10);
QModbusDataUnit writeUnit = QModbusDataUnit(type,startAddress, values.size());
for(int i=0; isize(); i++)
{
writeUnit.setValue(i, values.at(i));
}
//serverEdit 發生給slave的ID
if (auto *reply = modbusDevice->sendWriteRequest(writeUnit,ui->spinBoxStation->value()))
{
if (!reply->isFinished())
{
connect(reply, &QModbusReply::finished, this, [this, reply]() {
if (reply->error() == QModbusDevice::ProtocolError) {
qDebug() << QString("Write response error: %1 (Mobus exception: 0x%2)")
.arg(reply->errorString()).arg(reply->rawResult().exceptionCode(), -1, 16);
} else if (reply->error() != QModbusDevice::NoError) {
qDebug() << QString("Write response error: %1 (code: 0x%2)").
arg(reply->errorString()).arg(reply->error(), -1, 16);
}
reply->deleteLater();
});
}
else
{
reply->deleteLater();
}
}
else
{
qDebug() << QString(("Write error: ") + modbusDevice->errorString());
}
}
??對于自動周期性讀取從站數據我們通過一個計時器周期性操作,而從站的地址、讀取的寄存器類型、讀取的寄存器起始地址、寄存器的數量以及間隔時間通過界面設置。而其操作與手動按鈕觸發一樣。
3.3、信息顯示功能
??對于信息的顯示我們主要考慮3個方面的內容。一是讀取回來的從站數據結果顯示;二是上下行報文的監視;三是操作過程及狀態的顯示。
??首先是對讀取回來的從站數據進行顯示,在這里我們將讀取的寄存器地址及其對應的數據顯示在消息框中。同時我們將部分數據在圖形顯示中以曲線的形式展示出來。
//曲線顯示
void MainWindow::ChartDisplay()
{
QColor acolor[8]={Qt::red,Qt::blue,Qt::green,Qt::cyan,Qt::yellow,Qt::magenta,Qt::black,Qt::darkRed};
QStringList name={"拋物線","正弦值","正弦值","固定值","固定值","固定值","固定值","固定值"};
QVector list[8];
QVector newlist[8];
for(int j=0;j<8;j++)
{
list[j] = lineSeries[j]->pointsVector();//獲取現在圖中列表
if (list[j].size() < 200)
{
//保持原來
newlist[j] = list[j];
}
else
{
//錯位移動
for(int i =1 ; i< list[j].size();i++)
{
newlist[j].append(QPointF(i-1,list[j].at(i).y()));
}
}
newlist[j].append(QPointF(newlist[j].size(),values[j]));//最后補上新的數據
lineSeries[j]->replace(newlist[j]);//替換更新
lineSeries[j]->setName(name[j]);//設置曲線名稱
lineSeries[j]->setPen(acolor[j]);//設置曲線顏色
lineSeries[j]->setUseOpenGL(true);//openGl 加速
//mChart->setTitle("Pressure Data");//設置圖標標題
mChart->removeSeries(lineSeries[j]);
mChart->addSeries(lineSeries[j]);
mChart->createDefaultAxes();//設置坐標軸
}
ui->graphicsView->setChart(mChart);
}
??其次對于上下行報文我們也將其顯示到消息顯示框中。在QT對Modbus協議進行封裝后,我們沒有辦法直接獲取上下行的報文,我們可以開啟日志答應功能,再從其中截取相應的報文。
QLoggingCategory::setFilterRules(QStringLiteral("qt.modbus* = true"));
??而操作過程及狀態顯示則比較簡單,我們在狀態欄顯示相應的操作過程和操作的狀態。
4、小結
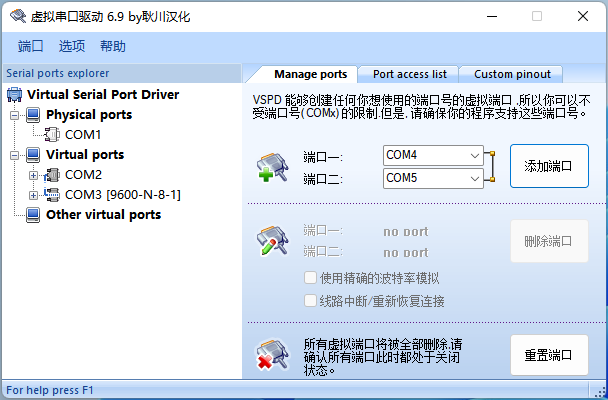
??完成了編碼調試后,我們尚需要對這一工具進行一些測試。首先我們安裝一個虛擬串口軟件用以虛擬我們用于測試的串口,并找到一款Modbus RTU的從站模擬軟件。當然有實際的從站和硬件的串行端口更好,在這里我們先用軟件模擬。具體的配置如下圖所示:
??而Modbus RTU從站我們使用MThings來模擬,當然也可以使用其它Modbus RTU從站模擬軟件。我們模擬10個保持寄存器和10個線圈,之所以這么設置是因為這兩種數據類型支持讀寫,方便我們測試。具體的配置如下圖所示:

??現在將我們設計的Modbus RTU主站運行起來,并使用它去訪問我們剛才配置的Modbus RTU從站。首先我們實驗讀從站數據操作。測試的結果如下圖所示:
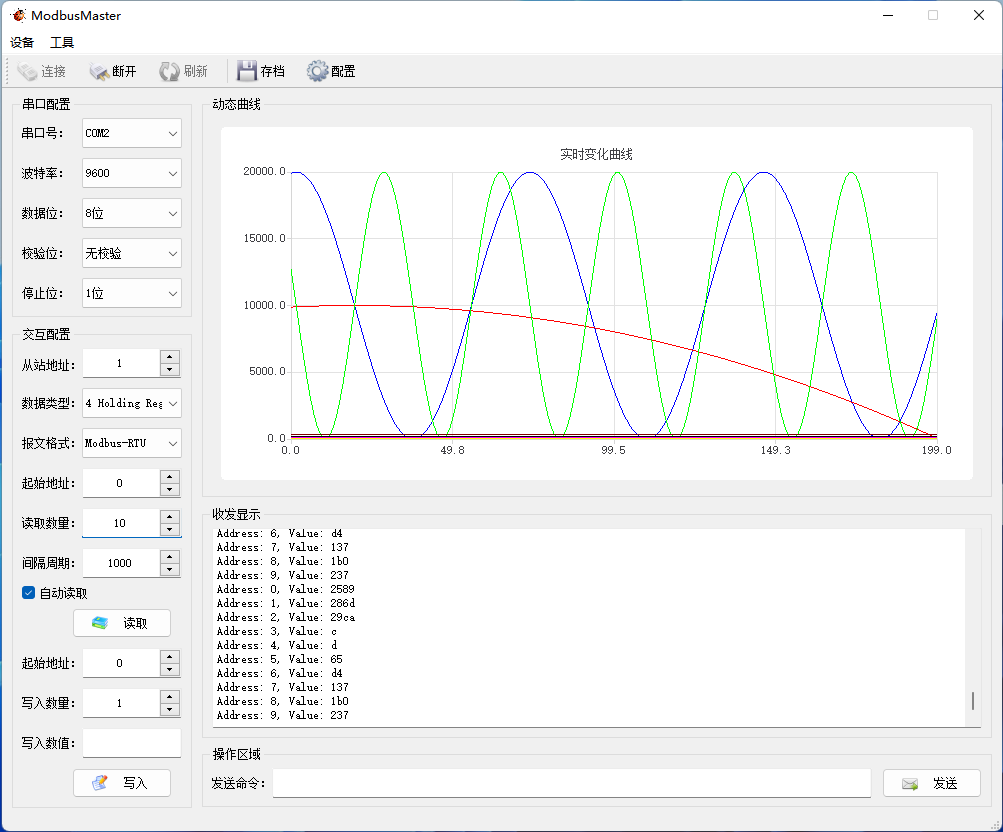
??這里我們讀取從站從地址0開始的10個保持寄存器,并將值顯示在消息框和圖形中。我們模擬了2路正弦信號、1路拋物線信號和5路固定值信號。接下來我們測試一下寫操作。測試的結果如下圖所示:
??這里對從站的從地址3開始的3個保持寄存器的值進行修改。設定的值分別是123、456和789,操作完成后我們查看從站的結果如下:

??上圖中與我們設定值的完全符合,說明我們的寫從站操作時正確的。到這里我們基于QT的Modbus RTU主站就基本實現了。當然,我們還可以根據需要修改或添加一些功能以適應不同的應用需求。我們已經將代碼發布到Gitee,歡迎下載和交流。
下載地址:https://gitee.com/ErichMoonan/ModbusMaster
-
MODBUS
+關注
關注
28文章
1805瀏覽量
77003 -
通訊協議
+關注
關注
10文章
274瀏覽量
20354 -
Qt
+關注
關注
1文章
304瀏覽量
37922 -
RTU
+關注
關注
0文章
413瀏覽量
28680
發布評論請先 登錄
相關推薦
請教 labview 做一個modbus RTU 主站
【NanoPi M2試用體驗】之Modbus-RTU主站開發
Modbus多主站問題
請問在STM32上跑modbus rtu主站應該怎么做
如何快速實現Modbus RTU和Modbus TCP協議轉換?
淺談ModBus RTU與ModBus TCP
C#上位機:Modbus RTU通訊實例

EtherNet/IP轉Modbus-RTU主站協議網關(JM-EIP-RTU)

EtherNet/IP轉Modbus-RTU主站網關(EtherNet/IP轉Modbus-RTU)
Modbus RTU轉CC-Link協議網關(CC-Link轉Modbus RTU)

CC-Link IEFB主站轉Modbus RTU協議網關(YC-CCLKIEM-RTU)

EtherCAT主站轉Modbus RTU網關(EtherCAT轉Modbus RTU)
Modbus RTU轉CC-link協議網關(Modbus RTU轉CC-link)

EtherCAT轉 4 路Modbus RTU網關-三格電子





 工商網監
工商網監
評論