") 車載CAN-FD的抗擾度評(píng)估技術(shù)
車載CAN-FD的抗擾度評(píng)估技術(shù)
摘要
眾所周知,大量的電子控制單元(ECU)和高速通信局域網(wǎng)(LAN)對(duì)于高級(jí)駕駛輔助系統(tǒng)(ADAS)來說是必要的。原始設(shè)備制造商(OEM)有興趣在車輛上引入具有靈活數(shù)據(jù)速率的控制器區(qū)域網(wǎng)絡(luò)(CAN-FD),因?yàn)樗哂懈邤?shù)據(jù)速率和低數(shù)據(jù)速率的仲裁階段。同時(shí),確保抗干擾性能是使用差分信號(hào)的CAN-FD的主要問題之一。我們以前報(bào)道過一種方法,以100Mbps以太網(wǎng)ECU的Sdc11為基礎(chǔ),使用差分信號(hào)來定義抗擾性能的標(biāo)準(zhǔn)。我們還研究了CAN-FD的模式轉(zhuǎn)換S參數(shù)的定義。在此基礎(chǔ)上,我們提出了一種CAN-FD收發(fā)器IC的抗擾度評(píng)估方法,以用于IC的選擇。
I.簡(jiǎn)介
最近,汽車上安裝了許多ECU,由于駕駛輔助功能和電氣組件的增加,ECU之間處理的數(shù)據(jù)量也增加了。CAN被廣泛用作連接ECU的車內(nèi)局域網(wǎng)標(biāo)準(zhǔn),其中數(shù)據(jù)的傳輸和接收速度主要為500 kbps。然而,隨著上述車載局域網(wǎng)上信息量的增加,羅伯特-博世新制定了CAN- FD,可以以5 Mbps的速度發(fā)送和接收數(shù)據(jù)。CAN在仲裁階段和數(shù)據(jù)階段使用相同的比特率。
相比之下,CAN-FD可以改變數(shù)據(jù)階段的比特率,使數(shù)據(jù)傳輸?shù)淖罡咚俣葹?Mbps[1],ISO標(biāo)準(zhǔn)[2]。具體來說,數(shù)據(jù)相位的信號(hào)振幅是相同的,而5 Mbps的數(shù)據(jù)相位速率是500 kbps的十倍。因此,確保抗干擾性能是CAN-FD的主要問題之一。
相比之下,CAN-FD作為CAN的替代品,正在進(jìn)行車內(nèi)研究。預(yù)計(jì)許多汽車制造商將繼承傳統(tǒng)的CAN組件和設(shè)計(jì)政策,如通信線路和ECU設(shè)計(jì)要求。為了確保這一點(diǎn),有必要確定收發(fā)器IC的抗擾度性能。
因此,我們認(rèn)為有必要事先估計(jì)一下收發(fā)器IC的抗干擾性能,并選擇一個(gè)可以安裝在車上的收發(fā)器IC。過去已有多項(xiàng)研究報(bào)道了以太網(wǎng)系統(tǒng)或差分通信系統(tǒng)的抗擾性能與100Base-T1[3]、1000Base-T1[4]和仿真分析[5]的模式轉(zhuǎn)換混合模s參數(shù)(Sdc)之間的關(guān)系。
在此基礎(chǔ)上,提出了一種定義Sdc11100mbps以太網(wǎng)[6]和1gbps以太網(wǎng)ECU[7]抗擾性能標(biāo)準(zhǔn)的方法。我們確認(rèn)了批量電流注入(BCI)測(cè)試結(jié)果與Sdc11值之間的關(guān)系,其中BCI測(cè)試是車輛設(shè)備[8]的抗擾度測(cè)試之一。
由于CAN-FD已經(jīng)被指定為繼承傳統(tǒng)設(shè)計(jì)要求中的Sdc11,到達(dá)收發(fā)器IC端的波形預(yù)計(jì)將根據(jù)BCI測(cè)試期間到達(dá)ECU端的噪聲來估計(jì)。
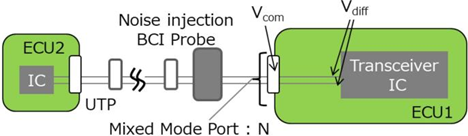
圖1. BCI對(duì)UTP的共模噪聲的誘導(dǎo)。
以往關(guān)于BCI測(cè)試建模的研究通常基于三維電磁場(chǎng)模擬[9]、等效電路模型(部分與實(shí)測(cè)模型相結(jié)合)[10]或?qū)崪y(cè)模型[11]。被測(cè)目標(biāo)設(shè)備通常與BCI測(cè)試環(huán)境分開建模,作為電路模型或阻抗模型。此外,這些研究還采用了單端特性進(jìn)行建模。在這項(xiàng)研究中,我們將目標(biāo)限定為CAN-FD差分通信。這使我們能夠?qū)⒛J睫D(zhuǎn)換s參數(shù)的概念應(yīng)用于噪聲傳播分析,并專注于到達(dá)收發(fā)端最壞的差分噪聲。此外,通過將目標(biāo)頻率限制在CAN-FD的抗擾度性能惡化的頻段,可以使用經(jīng)驗(yàn)知識(shí)進(jìn)行有效分析。
這項(xiàng)研究的目的是建立一種評(píng)估收發(fā)器IC的抗干擾性能的方法,并將其作為一種IC選擇方法。作為一個(gè)標(biāo)準(zhǔn),它應(yīng)該能夠估計(jì)實(shí)際收發(fā)器IC在BCI測(cè)試中的誤差。
II.估計(jì)收發(fā)器終端的噪音水平
A.收發(fā)器IC選擇方法概述
在BCI測(cè)試中,共模噪聲被應(yīng)用于非屏蔽雙絞線(UTP)電纜。然后,根據(jù)通信路徑的不平衡程度,將其轉(zhuǎn)換為差分噪聲。我們提出了一種使用100 Mbps和1 Gbps ECU的SdcNN定義抗擾性能標(biāo)準(zhǔn)的方法(圖1),其中我們定義了以dB符號(hào)表示的標(biāo)準(zhǔn)方程:

Vcom: 通過BCI測(cè)試施加到ECU的最大共模噪聲水平[V]。
Vdiff: 收發(fā)器可接受的差分噪聲的閾值水平[V]。
這些是在[6]中測(cè)量的電壓。
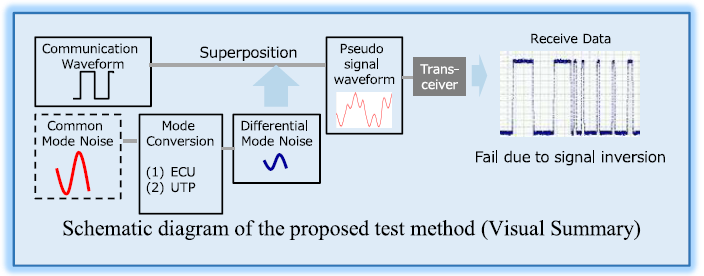
到達(dá)收發(fā)器IC的差分噪聲是造成誤差的主要原因。因此,有必要選擇一個(gè)能夠承受BCI測(cè)試中產(chǎn)生的最差差分噪聲的收發(fā)器IC。視覺摘要(在第1頁(yè))顯示了所提出的IC選擇方法的原理圖。在這項(xiàng)研究中,我們重點(diǎn)關(guān)注在OEM測(cè)試條件下CAN-FD的高錯(cuò)誤率的10-16MHz。通過使用通信路徑的模式轉(zhuǎn)換S參數(shù)對(duì)BCI測(cè)試期間到達(dá)ECU端的共模噪聲的影響來量化到達(dá)收發(fā)器IC端的最差差分噪聲(圖2),下一節(jié)將詳細(xì)解釋。
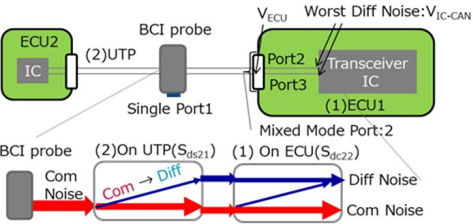
圖2. BCI測(cè)試期間的模式轉(zhuǎn)換原理圖。
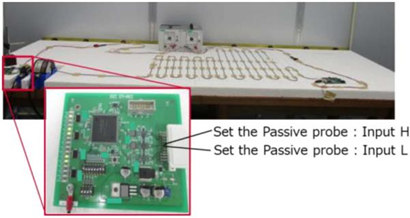
圖3. BCI測(cè)試期間的VECU測(cè)量設(shè)置。
接下來,通過將得出的最差差分噪聲疊加到通信信號(hào)上,產(chǎn)生一個(gè)偽信號(hào)波形。偽信號(hào)通過信號(hào)發(fā)生器直接作用于收發(fā)器IC。然后,根據(jù)輸出波形中是否存在錯(cuò)誤,來估計(jì)BCI測(cè)試的通過或失敗。在這些頻率中,位寬有時(shí)會(huì)因噪聲而波動(dòng),高(H)或低(L)被誤判。在我們的研究中,我們把錯(cuò)誤的原因限制在這種位寬波動(dòng)上。本節(jié)介紹了最差差分噪聲VIC-CAN的推導(dǎo)和驗(yàn)證。
B. CAN-FD的VIC-CAN的推導(dǎo)
到達(dá)CAN-FD收發(fā)器端的差分噪聲VIC-CAN被認(rèn)為是由ECU中的模式轉(zhuǎn)換產(chǎn)生的差分噪聲VIC和由通信線路(UTP)上的模式轉(zhuǎn)換產(chǎn)生的差分噪聲VUTP之和,具體如下:

VIC: ECU上模式轉(zhuǎn)換的電壓:VECU * Sdc22[V] @10-16 MHz。
VUTP: 來自UTP上模式轉(zhuǎn)換的電壓:VECU* Sdc21[V]@10-16MHz。
為了計(jì)算由ECU中的模式轉(zhuǎn)換產(chǎn)生并到達(dá)收發(fā)器IC終端的差分噪聲VIC,在BCI測(cè)試期間在ECU端測(cè)量VECU(圖3)。分析頻率被設(shè)定為10到16MHz,在這個(gè)頻率下,CAN- FD的抗干擾性能會(huì)惡化,達(dá)到的共模噪聲會(huì)超過監(jiān)測(cè)電流。一個(gè)使用VIC= VECU*Sdc22的VIC計(jì)算結(jié)果的例子顯示(圖4),其中ECU的Sdc22被設(shè)定為40dB。
根據(jù)傳統(tǒng)的CAN ECU規(guī)范,Sdc被選擇為40dB。
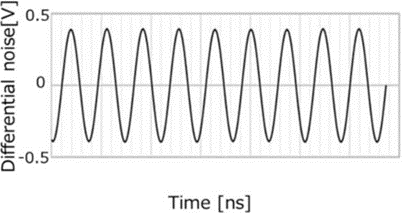
圖4. VIC的例子(在BCI測(cè)試期間12MHz的噪音)。
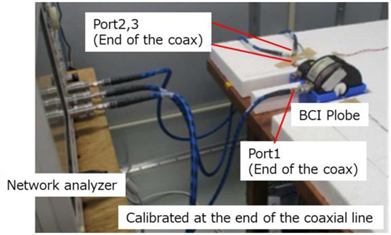
圖5. UTP的Sdc21測(cè)量設(shè)置。
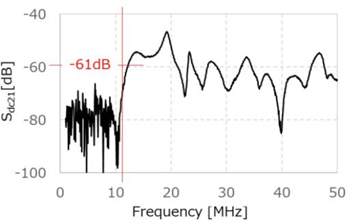
圖6. Sds21的測(cè)量結(jié)果。
據(jù)估計(jì),在10到16MHz時(shí),最大約0.4V的差分噪聲已經(jīng)到達(dá)。
接下來,由通信線路的模式轉(zhuǎn)換產(chǎn)生的差分噪聲VUTP被導(dǎo)出。根據(jù)原始設(shè)備制造商設(shè)定的ECU的Sdc測(cè)量頻段,它被測(cè)量到50MHz。構(gòu)建BCI測(cè)試環(huán)境是為了測(cè)量從BCI探頭通過通信線路到達(dá)ECU端的信號(hào)的模式轉(zhuǎn)換Sdc21(圖5和6)。由于VECU的最大值在12MHz時(shí)為120V,通過乘以12MHz時(shí)61dB的Sdc21,得到VUTP為0.1V。因此,VUTP的最差值被設(shè)定為0.1V,并在本研究中應(yīng)用于10-16MHz的其他頻率。從上述情況來看,到達(dá)收發(fā)端的差分噪聲VIC-CAN在12MHz時(shí)被計(jì)算為約0.5V。
C.VIC-CAN的驗(yàn)證
因?yàn)樵贐CI測(cè)試中很難測(cè)量到達(dá)收發(fā)器IC端的差分噪聲,因?yàn)橥ㄐ挪罘中盘?hào)是疊加的。因此,我們把重點(diǎn)放在通信信號(hào)的位寬因差分噪聲而變化的事實(shí)上,并從位寬的波動(dòng)量驗(yàn)證了差分噪聲計(jì)算的有效性。即加噪聲時(shí),主隱性判斷位置發(fā)生變化,信號(hào)波形的位寬發(fā)生變化,因此以波動(dòng)量作為指標(biāo)。先前計(jì)算的VIC-CAN(12MHz時(shí)為0.5V)被用作最差的差分噪聲。為了看到連續(xù)變化的相位的最大值,通過以足夠小的0.1rad步長(zhǎng)進(jìn)行移位來檢查。在信號(hào)波形上疊加VIC CAN,并以0.1rad的步長(zhǎng)移動(dòng)相位,信號(hào)波形的最大波動(dòng)量為33ns(表I,圖7)。這種波動(dòng)直接影響到收發(fā)電路中的比特提取。
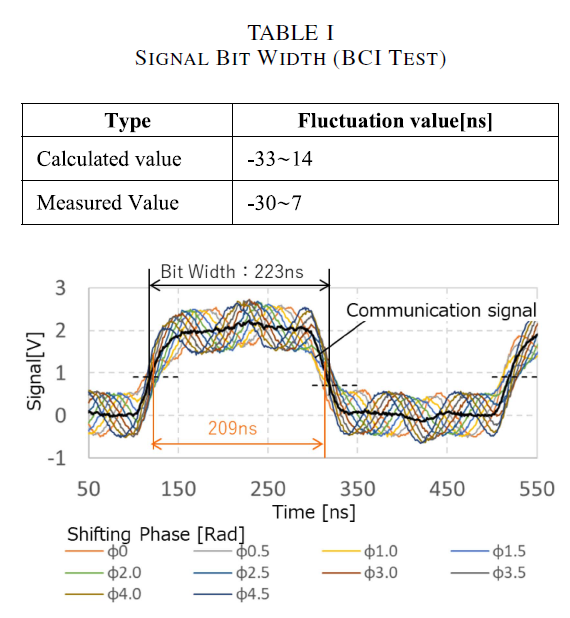
圖7. 在收發(fā)器輸入處的位寬波動(dòng)計(jì)算值的例子。
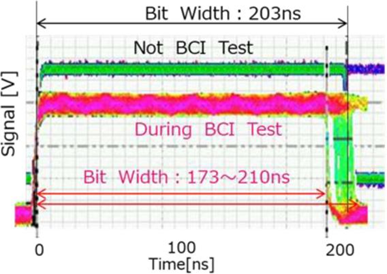
圖8. 在收發(fā)器輸出(RXD)進(jìn)行BCI測(cè)試期間的位寬波動(dòng)測(cè)量值。
在BCI測(cè)試期間測(cè)量接收數(shù)據(jù)(RXD)波形的結(jié)果是,信號(hào)波形的最大波動(dòng)量為30ns(表I,圖8)。在這里,比特波動(dòng)由接收信號(hào)主導(dǎo),但信號(hào)幅度相對(duì)穩(wěn)定,因?yàn)樗怯蒖XD輸出電路控制的。由于證實(shí)了計(jì)算出的信號(hào)波形的最大波動(dòng)量與實(shí)際測(cè)量的波動(dòng)量幾乎相同,因此得出結(jié)論,12MHz的VIC CAN可以在上一節(jié)中被適當(dāng)估計(jì)。
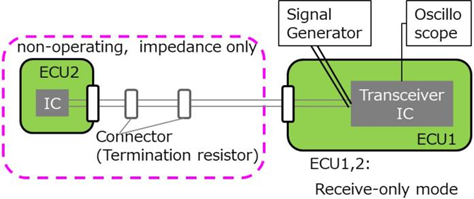
圖9. 擬議的測(cè)試方法的測(cè)試裝置。
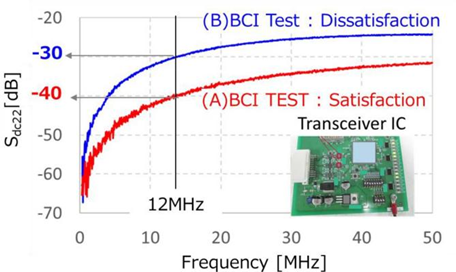
圖10. 評(píng)估板和Sdc22的結(jié)果。
III.審查收發(fā)器IC選擇方法
由于上一節(jié)中計(jì)算的VIC CAN是到達(dá)收發(fā)器IC端的差分噪聲,在BCI測(cè)試期間輸入到收發(fā)器IC的信號(hào)可以通過將VIC CAN疊加到通信信號(hào)上進(jìn)行模擬。偽信號(hào)波形的輸入系統(tǒng)和輸出波形的測(cè)量系統(tǒng)如圖所示(圖9)。偽信號(hào)從信號(hào)發(fā)生器直接施加到安裝在評(píng)估板上的收發(fā)器IC的CAN-H和CAN-L終端。然后,用示波器測(cè)量輸出,以獲得其波形。由于只有一種類型的樣品IC(來自合作的半導(dǎo)體制造商的原型)可用,因此準(zhǔn)備了以下兩種類型的偽信號(hào)波形,并用于驗(yàn)證測(cè)試方法。

我們準(zhǔn)備了兩塊具有不同Sdc22值的板子,即40分貝和30分貝,并安裝了收發(fā)器IC以進(jìn)行BCI測(cè)試(圖10)。我們確認(rèn),BCI測(cè)試結(jié)果的通過或失敗在兩個(gè)板子中是不同的。
結(jié)果顯示在圖11中。波形(A)相當(dāng)于原始波形,沒有發(fā)生錯(cuò)誤,而波形(B)會(huì)導(dǎo)致位反轉(zhuǎn),可以估計(jì)出一個(gè)通信錯(cuò)誤。從這一結(jié)果中,我們可以確認(rèn)使用應(yīng)用于收發(fā)器IC的偽信號(hào)波形對(duì)BCI測(cè)試的通過或失敗進(jìn)行估計(jì)。
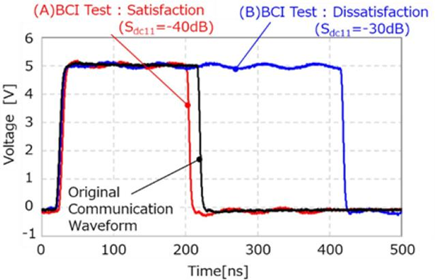
圖11. 實(shí)例測(cè)量的結(jié)果。
IV.總結(jié)
提出了一種CAN-FD收發(fā)器的IC選擇方法,利用混合模式的S參數(shù)來估計(jì)UTP和ECU上的模式轉(zhuǎn)換,來定義抗干擾性能的最差差分噪聲。在BCI測(cè)試期間到達(dá)收發(fā)器IC的最差差分噪聲被疊加在信號(hào)波形上,以獲得一個(gè)用于評(píng)估IC輸出信號(hào)的偽信號(hào)。通過比較其在IC輸出信號(hào)終端的位寬波動(dòng)與具有實(shí)際通信錯(cuò)誤的BCI測(cè)試中的位寬波動(dòng),驗(yàn)證了最差的差分噪聲水平。最后,通過與實(shí)際BCI測(cè)試的結(jié)果進(jìn)行比較,我們確認(rèn)使用該方法可以估計(jì)BCI測(cè)試的通過或失敗,只需將偽信號(hào)直接應(yīng)用于收發(fā)器IC,而無(wú)需使用BCI測(cè)試環(huán)境。
審核編輯:湯梓紅
-
收發(fā)器
+關(guān)注
關(guān)注
10文章
3428瀏覽量
105999 -
CAN
+關(guān)注
關(guān)注
57文章
2754瀏覽量
463698 -
ecu
+關(guān)注
關(guān)注
14文章
886瀏覽量
54502 -
抗擾度
+關(guān)注
關(guān)注
0文章
18瀏覽量
9263
原文標(biāo)題:車載CAN-FD的抗擾度評(píng)估技術(shù)
文章出處:【微信號(hào):智能汽車電子與軟件,微信公眾號(hào):智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
車載線束系統(tǒng)輻射抗擾度測(cè)試的案例分析
應(yīng)用指南—如何使用DSLogic分析CAN/CAN-FD信號(hào)?
CAN-FD協(xié)議你了解多少
一文淺析汽車CAN-FD總線的通信應(yīng)用
多核異構(gòu)-雙核高速率CAN-FD評(píng)測(cè)
是否有任何外部組件可以使ESP32S3與CAN-FD兼容?
[原創(chuàng)] MicrochipCAN LIN CAN-FD汽車網(wǎng)絡(luò)開發(fā)方案
![[原創(chuàng)] MicrochipCAN LIN <b class='flag-5'>CAN-FD</b>汽車網(wǎng)絡(luò)開發(fā)方案](https://file1.elecfans.com//web2/M00/A7/38/wKgZomUMQxqAQ3EDAACKNtK0Npk204.png)
你知道CAN-FD協(xié)議有多少?
DS70000系列數(shù)字示波器在CAN-FD協(xié)議解碼上的應(yīng)用
STM32設(shè)備上的CAN FD
簡(jiǎn)單介紹基于CAN-FD的診斷通信傳輸層
CAN與CAN-FD主要區(qū)別概述
CAN-FD協(xié)議有哪些車用
如何使用DSLogic分析CAN/CAN-FD 信號(hào)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論