") 為風(fēng)力渦輪機(jī)狀態(tài)監(jiān)測選擇最佳振動傳感器
為風(fēng)力渦輪機(jī)狀態(tài)監(jiān)測選擇最佳振動傳感器
作者:Richard Anslow and Dara O’Sullivan
保守估計表明,目前全球至少有四分之一的風(fēng)力渦輪機(jī)安裝。未來四年,全球風(fēng)力渦輪機(jī)市場預(yù)計將增加278吉瓦的陸上容量和44.3吉瓦的海上容量。1這相當(dāng)于至少 100,000 臺 3 MW 風(fēng)力渦輪機(jī)。隨著可再生能源的增長以及國家電網(wǎng)的電力輸入,風(fēng)力渦輪機(jī)(WT)裝置的可靠運(yùn)行成為行業(yè)和政府機(jī)構(gòu)進(jìn)行重大研究的主題。對WT可靠性的定量研究表明,可靠性隨著時間的推移而增加。例如,2016年美國國家可再生能源實驗室報告2研究表明,包括變速箱在內(nèi)的大多數(shù)WT子系統(tǒng)的可靠性在2007年至2013年間都有所提高,變速箱停機(jī)時間減少了七倍。然而,在2018年,齒輪箱仍然是材料成本最高的三個最有可能的故障地點之一。2,3變速箱每次故障的平均成本最高,主要更換平均成本為 230,000 歐元。4
齒輪箱部件的可靠性相對較差,因此需要對齒輪、軸承和軸的狀態(tài)監(jiān)測進(jìn)行強(qiáng)調(diào)。除齒輪箱外,轉(zhuǎn)子葉片和發(fā)電機(jī)是故障率最高的WT系統(tǒng)部件。5,6有許多商用風(fēng)力渦輪機(jī)狀態(tài)監(jiān)測系統(tǒng),其中大多數(shù)針對使用振動傳感器的齒輪箱分析。7有一些市售的轉(zhuǎn)子葉片監(jiān)控系統(tǒng)7,但這是一個正在進(jìn)行的研究領(lǐng)域。有大量文獻(xiàn)支持在風(fēng)力渦輪機(jī)中使用振動監(jiān)測系統(tǒng),包括對各種系統(tǒng)優(yōu)勢的詳細(xì)調(diào)查和分析。8風(fēng)力渦輪機(jī)應(yīng)用的振動傳感器要求不太清楚。本文提供了有關(guān)風(fēng)力渦輪機(jī)組件、故障統(tǒng)計、常見故障類型和故障數(shù)據(jù)收集方法的系統(tǒng)見解。振動傳感器的要求,如帶寬、測量范圍和噪聲密度,將討論與WT組件上的常見故障相關(guān)的問題。
系統(tǒng)組件、故障和傳感器要求
圖1和圖2說明了風(fēng)力渦輪機(jī)系統(tǒng)的主要部件,以及風(fēng)力渦輪機(jī)齒輪箱的詳細(xì)結(jié)構(gòu)。以下各節(jié)重點介紹狀態(tài)監(jiān)測的齒輪箱、葉片和塔架要求,重點介紹振動傳感器。其他系統(tǒng),如偏航驅(qū)動器、機(jī)械制動器和發(fā)電機(jī),通常不使用振動傳感器進(jìn)行監(jiān)控,通常監(jiān)控扭矩、溫度、油參數(shù)和電信號。
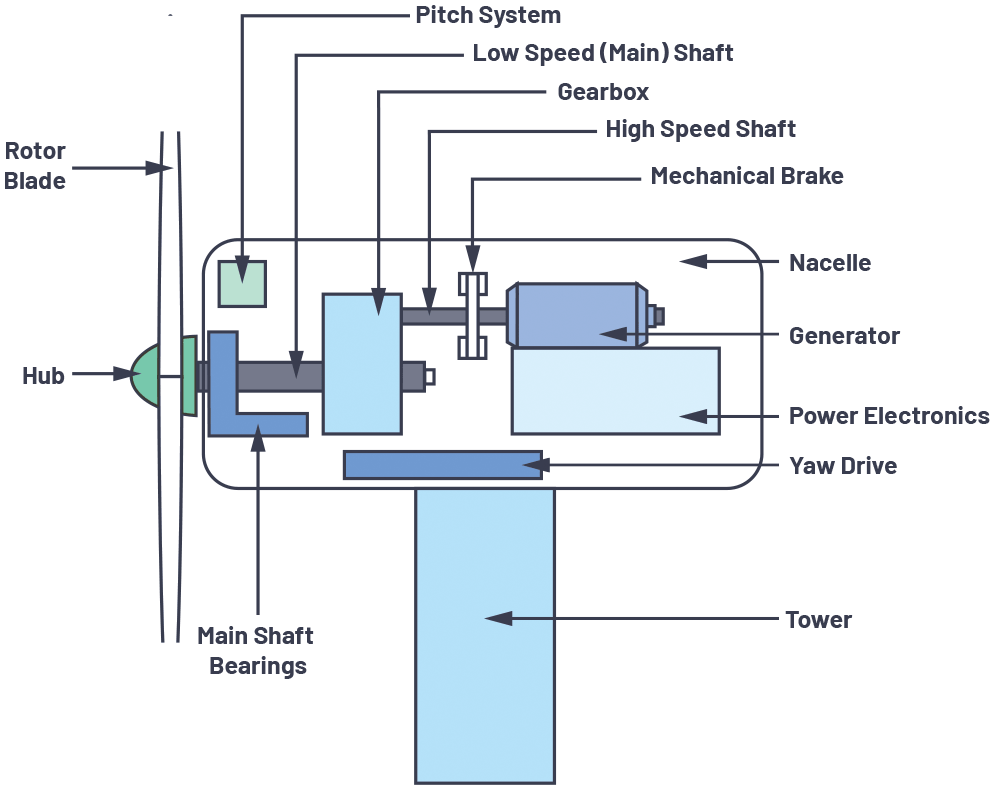
圖1.風(fēng)力渦輪機(jī)系統(tǒng)組件。
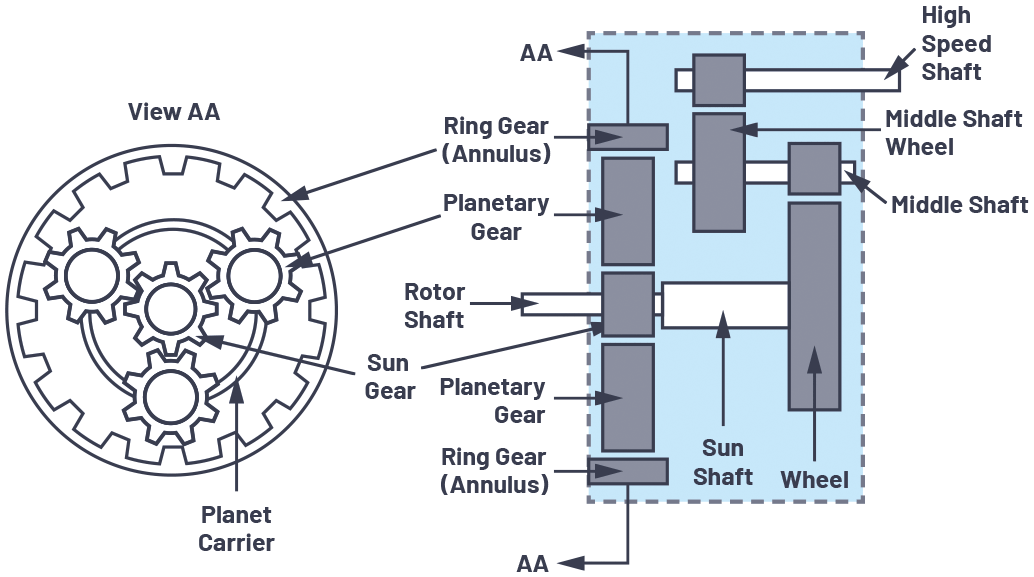
圖2.變速箱結(jié)構(gòu)。
變速器
風(fēng)力渦輪機(jī)齒輪箱將機(jī)械能從低轉(zhuǎn)速的轉(zhuǎn)子輪轂傳遞到高速發(fā)電機(jī)。同時,WT變速箱承受著來自不同風(fēng)速和頻繁制動動作的瞬態(tài)脈沖的交變載荷。齒輪箱由低速轉(zhuǎn)子軸和主軸承組成,在施加到轉(zhuǎn)子葉片的風(fēng)力的 0 rpm 至 20 rpm(小于 0.3 Hz)范圍內(nèi)運(yùn)行。捕獲增加的振動特征需要能夠直接工作到直流的振動傳感器。行業(yè)認(rèn)證指南特別指出,振動傳感器需要0.1 Hz的性能。9變速箱高速軸通常以 3200 rpm(53 Hz)的速度運(yùn)行。為了提供足夠的帶寬來捕獲軸承和齒輪故障的諧波,建議低速和高速軸的振動傳感器性能高達(dá)10 kHz及以上。 9這是因為無論轉(zhuǎn)速如何,方位共振通常在幾千赫茲范圍內(nèi)。10
到目前為止,軸承故障是導(dǎo)致齒輪箱故障的最大原因。一些研究表明,齒輪的災(zāi)難性故障是軸承故障的根本原因。11當(dāng)高速軸中的后軸承發(fā)生故障時,高速軸傾斜,導(dǎo)致與中間(中間)軸齒輪傳動不均勻。在這種情況下,接觸的齒容易失效,如圖3所示。
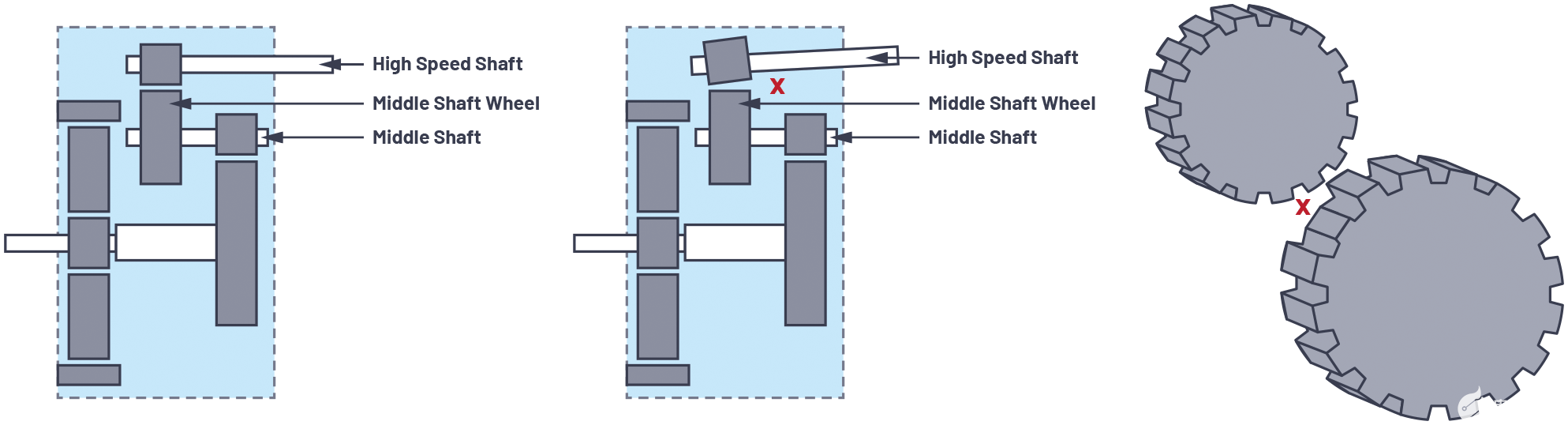
圖3.中軸齒輪斷齒。
軸承潤滑(缺油)對主軸軸承故障有很大影響。SKF NoWear等解決方案包括一種特殊的軸承涂層,12這可以幫助將缺油時間縮短六倍以上。
即使使用特殊的軸承涂層和其他齒輪箱改進(jìn)方法,仍然需要使用合適的振動傳感器監(jiān)控齒輪箱主軸承和高速級軸承。振動傳感器需要具有足夠低的本底噪聲,以便可以檢測到低振動幅度(g范圍)的早期軸承故障。較舊的MEMS技術(shù),例如具有4 mg/√Hz本底噪聲的ADXL001,可以充分捕獲軸承外圈故障。13圖4顯示,外圈故障首先出現(xiàn)在大約0.055 g的頻率峰值處,從噪聲密度的角度來看,良好的軸承行為表現(xiàn)為小于2 mg/√Hz。參考數(shù)據(jù)采集系統(tǒng)的過程增益13從而大大降低噪聲,從而可以測量2 mg/√Hz本底噪聲。僅當(dāng)DAQ系統(tǒng)獲得足夠的過程增益并且噪聲是隨機(jī)的時,才適合使用本底噪聲為4 mg/√Hz的傳感器。通常,最好使用本底噪聲為100 μg/√Hz至200 μg/√Hz的振動傳感器,而不是依賴于過程增益,因為過程增益僅在噪聲是隨機(jī)且不相關(guān)的時才有效。
本底噪聲為 100 μ g/√Hz 至 200 μg/√Hz 的傳感器具有足夠的性能來捕獲正常的軸承工作條件,并且在捕獲 mg/√Hz 范圍內(nèi)的早期故障時具有出色的性能。事實上,使用本底噪聲為100 μg/√Hz的MEMS傳感器將能夠更早地檢測軸承故障。
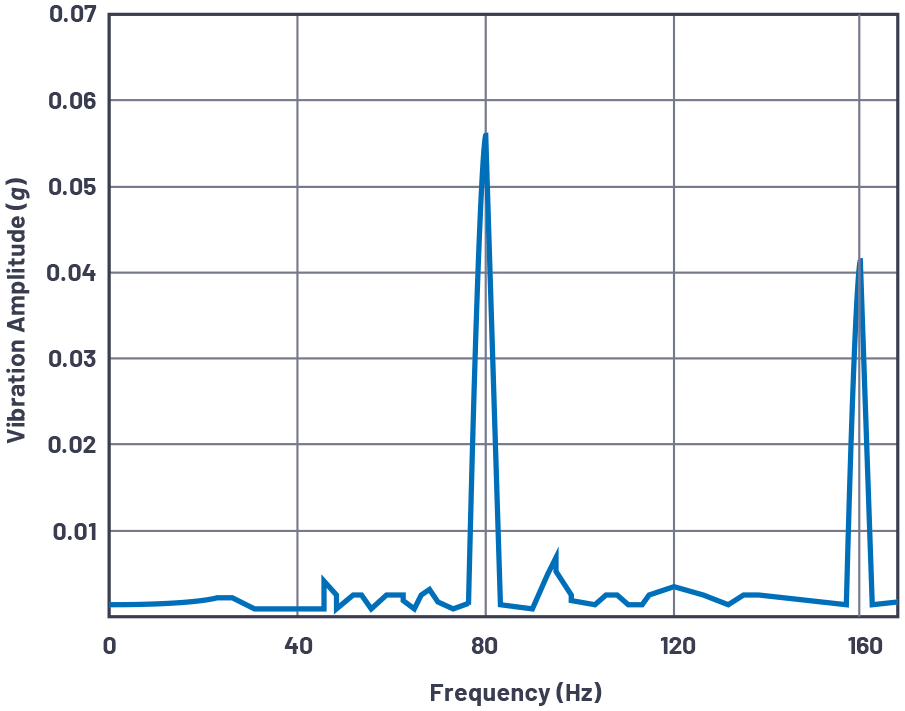
圖4.使用MEMS加速度計ADXL001測量的軸承外圈故障。
雖然初始軸承損壞小于 0.1 g,但高級軸承損壞特征通常發(fā)生在 1 g 時,這應(yīng)該會觸發(fā)維護(hù)。14圖 5 顯示,當(dāng)振動幅度超過 6 g 時,可以進(jìn)行齒輪箱維護(hù)和軸承更換。如前所述,軸承故障的諧波發(fā)生在更高的頻率上。更高頻率的測量需要具有更大g量程規(guī)格的傳感器。這是因為測得的加速度g力與頻率的平方成正比。因此,與低頻下的相同故障位移相比,較高頻率下的小故障位移會導(dǎo)致更高的g范圍。測量范圍高達(dá) 10 kHz 的更高帶寬傳感器通常指定為 50 g 至 200 g,非常適合風(fēng)力渦輪機(jī)應(yīng)用。振動傳感器還需要覆蓋由于結(jié)構(gòu)沖擊或突然機(jī)械斷裂而導(dǎo)致的沖擊載荷條件。因此,典型的商用振動監(jiān)測系統(tǒng)的額定滿量程范圍至少為50 g至100 g。
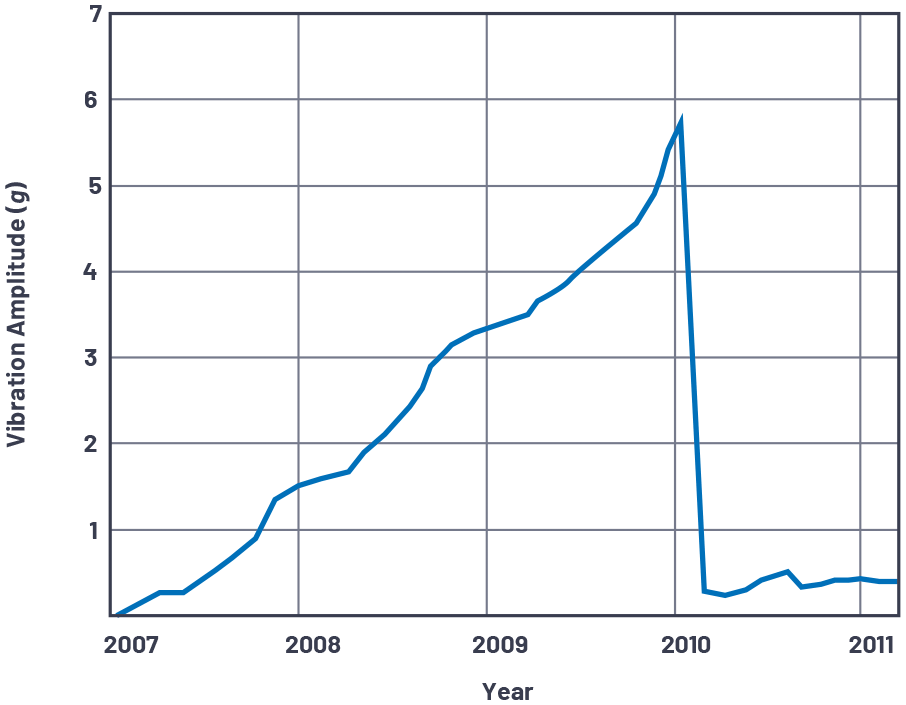
圖5.在 6 g 振動幅度下更換軸承。
對于風(fēng)力渦輪機(jī)主軸承,至少需要一個單軸振動傳感器,建議使用兩個,并在軸向和徑向進(jìn)行測量。9軸承座圈的軸向開裂可將軸承壽命縮短至一到兩年。
由于齒輪箱的復(fù)雜性,如圖2所示,建議至少使用六個振動傳感器進(jìn)行狀態(tài)監(jiān)測。9傳感器的數(shù)量和位置的選擇應(yīng)確保能夠可靠地測量所有齒輪嚙合和缺陷/旋轉(zhuǎn)頻率。對于變速箱低速級,需要一個單軸傳感器,盡可能靠近齒圈放置。對于中速和高速級,太陽齒輪、中軸和高速軸位置需要一個單軸傳感器。高速和中速軸承內(nèi)圈的軸向裂紋已成為風(fēng)力渦輪機(jī)齒輪箱壽命問題的主要原因。
對于齒輪箱監(jiān)測,狀態(tài)監(jiān)測的未來改進(jìn)領(lǐng)域包括采用無線振動監(jiān)測系統(tǒng),但可持續(xù)地為這些解決方案供電是一個正在進(jìn)行的研究領(lǐng)域。
轉(zhuǎn)子葉片
風(fēng)力渦輪機(jī)轉(zhuǎn)子葉片和輪轂組件捕獲風(fēng)并在低速時傳遞扭矩。葉片失效的主要原因包括極端風(fēng)荷載、結(jié)冰或閃電等環(huán)境影響以及不平衡。這些會導(dǎo)致斷裂和邊緣裂紋,以及變槳系統(tǒng)故障。存在數(shù)量有限的商業(yè)振動監(jiān)測系統(tǒng),包括葉片內(nèi)部和外部。8在刀片上使用MEMS振動傳感器進(jìn)行了許多學(xué)術(shù)研究,例如Cooperman和Martinez的工作,16這還包括陀螺儀和磁力計。這些傳感器的組合輸出用于確定風(fēng)力渦輪機(jī)葉片段的方向和變形。相比之下,很少有商業(yè)振動監(jiān)測系統(tǒng)可用,例如Weidmuller BLADEcontrol,?17它使用每個轉(zhuǎn)子葉片內(nèi)部的振動傳感器來測量每個轉(zhuǎn)子葉片固有振動行為的變化。BLADE控制系統(tǒng)專注于檢測轉(zhuǎn)子葉片上導(dǎo)致渦輪過度振動的極端結(jié)冰條件。
通常,大型風(fēng)力渦輪機(jī)葉片(即直徑40米及以上)的第一固有頻率在0.5 Hz至15 Hz范圍內(nèi)。18渦輪葉片無線振動監(jiān)測系統(tǒng)的可行性研究18表明振動激勵引起的葉片頻率響應(yīng)明顯超出了基波。其他研究19表明葉片邊緣變形和葉片扭轉(zhuǎn)變形引起的葉片頻率存在顯著差異。葉片邊緣變形固有頻率發(fā)生在 0.5 Hz 至 30 Hz 范圍內(nèi),葉片扭轉(zhuǎn)變形固有頻率發(fā)生在高達(dá) 700 Hz 的范圍內(nèi)。 使用振動傳感器進(jìn)行超出基頻的測量需要更大的帶寬。DNVGL狀態(tài)監(jiān)測規(guī)范認(rèn)證9建議對能夠在 0.1 Hz 至 ≥10 kHz 頻率范圍內(nèi)進(jìn)行測量的轉(zhuǎn)子葉片使用振動傳感器,轉(zhuǎn)子軸上有一個傳感器,橫向上有一個傳感器。由于轉(zhuǎn)子葉片的測量范圍可能很高,振動傳感器還必須具有至少 50 g 的大振幅測量范圍,類似于齒輪箱軸承的要求。
帶機(jī)艙的塔樓
風(fēng)力渦輪機(jī)塔架為機(jī)艙外殼和轉(zhuǎn)子葉片組件提供結(jié)構(gòu)支撐。塔可能會遭受沖擊損壞,從而導(dǎo)致塔傾斜。傾斜的塔將導(dǎo)致葉片相對于風(fēng)向的角度不理想。測量傾斜度需要一個可以在零風(fēng)條件下工作到0 Hz的傳感器,以便仍然可以檢測到傾斜。
地基的結(jié)構(gòu)損壞會導(dǎo)致塔樓搖擺。塔搖晃監(jiān)測內(nèi)置于一些渦輪機(jī)狀態(tài)監(jiān)測系統(tǒng)中,但與齒輪箱振動監(jiān)測相比,商用選項很少。8斯凱姆狀態(tài)監(jiān)測系統(tǒng)20使用加速度計、位移傳感器、應(yīng)變傳感器和溫度傳感器監(jiān)控葉片、塔架和基礎(chǔ)。Scaime 加速度計滿量程范圍報價為 ±2 g,20根據(jù)DNVGL規(guī)范,監(jiān)測的頻率需要在0.1 Hz至100 Hz范圍內(nèi)。9如前所述,在靜態(tài)條件下(無風(fēng)力)發(fā)生塔架結(jié)構(gòu)故障導(dǎo)致傾斜的情況下,頻率下限降低到 0 Hz。對于傾斜測量,需要具有出色直流穩(wěn)定性性能的傳感器。ADXL355等MEMS傳感器采用密封封裝,可實現(xiàn)業(yè)界領(lǐng)先的0 g失調(diào)穩(wěn)定性。
研究21驗證最小量程為 ±2 g 的振動傳感器是否足以用于塔式監(jiān)測。在正常運(yùn)行模式下,最大風(fēng)速為 25 mps,塔的加速度 g 水平小于 1 g。事實上,風(fēng)電機(jī)組在“基于現(xiàn)場測量和有限元分析的風(fēng)電機(jī)組塔架基礎(chǔ)系統(tǒng)可識別應(yīng)力狀態(tài)”21研究的額定風(fēng)速為 2 MPS 至 25 MPS,風(fēng)力渦輪機(jī)功率在 25 MPS 風(fēng)速下關(guān)閉(切斷)。
總結(jié)
表1總結(jié)了基于風(fēng)力渦輪機(jī)應(yīng)用要求的振動傳感器要求。傳感器的數(shù)量、測量方向和頻率范圍在狀態(tài)監(jiān)測規(guī)范的DNVGL認(rèn)證中給出。9如前所述,0 Hz性能對于監(jiān)測塔結(jié)構(gòu)問題非常重要。表1還總結(jié)了基于本文提供的現(xiàn)場研究和測量的適當(dāng)幅度范圍和噪聲密度。
| 元件 | 不。傳感器數(shù)量 | 測量方向 | 頻率范圍 | 加速度范圍 | 噪聲密度 |
| 轉(zhuǎn)子葉片 | 兩個單軸 | 軸向和橫向 | 0.1 赫茲至 ≥10 kHz | ±50 克(最小)至 100 克 | ≤1 mg/√Hz 捕獲一般故障 |
| 主軸承 | 兩個單軸 | 徑向和軸向 | 0.1 赫茲至 ≥10 kHz | ±50 克(最小)至 100 克 | |
| 變速箱低速(齒圈) | 單軸 | 徑向 | 0.1 赫茲至 ≥10 kHz | ±50 克(最小)至 100 克 | ≤需要 100 μg/√Hz 至 200 μg/√Hz 來捕獲早期狀態(tài)軸承故障 |
| 中高速變速箱(太陽齒輪、中速和高速軸) | 三個單軸 | 徑向和軸向 | 10 赫茲至 ≥10 kHz | ±50 克(最小)至 100 克 | |
| 發(fā)電機(jī)軸承(舷內(nèi)和舷外軸承) | 兩個單軸 | 徑向 | 10 赫茲至 ≥10 kHz | ±50 克(最小)至 100 克 | 捕獲正常工作條件所需的 ≤100 μ克/√赫茲至 200 μ克/√赫茲 |
| 塔和機(jī)艙 | 兩個單軸 | 軸向和橫向 | 0 赫茲至 ≥100 赫茲 | ±2 克(最小值) |
故障數(shù)據(jù)采集方法
所有大型公用事業(yè)WT都有一個標(biāo)準(zhǔn)的監(jiān)控和數(shù)據(jù)采集(SCADA)系統(tǒng),主要用于參數(shù)監(jiān)控。監(jiān)控參數(shù)的示例包括齒輪箱軸承溫度和潤滑、有功功率輸出和相電流。一些參考資料6討論使用SCADA數(shù)據(jù)對風(fēng)力渦輪機(jī)進(jìn)行狀態(tài)監(jiān)測,以檢測趨勢。杜倫大學(xué)的一項調(diào)查7列出多達(dá) 10 種商用狀態(tài)監(jiān)測系統(tǒng),這些系統(tǒng)可以使用標(biāo)準(zhǔn)協(xié)議與現(xiàn)有 SCADA 系統(tǒng)進(jìn)行調(diào)整并完全集成。一個例子是GE Energy ADAPT。風(fēng)。22對未來技術(shù)趨勢的廣泛調(diào)查7表明在風(fēng)力渦輪機(jī)上安裝振動監(jiān)測系統(tǒng)的明顯趨勢。
適用于風(fēng)力渦輪機(jī)狀態(tài)監(jiān)測的振動傳感器
在 0.3 Hz 或以下,基于壓電的振動技術(shù)難以捕獲或無法捕獲振動特征。這意味著轉(zhuǎn)子葉片、主軸承、低速齒輪箱和塔架等低速WT部件無法得到適當(dāng)監(jiān)控。基于MEMS的傳感器性能低至0 Hz,可以捕獲所有主要風(fēng)力渦輪機(jī)組件的關(guān)鍵故障。這為客戶提供了WT的單一振動傳感器解決方案,僅使用MEMS測量0 Hz至10 kHz及以上的故障。
| 適用于 CbM 的技術(shù) | 轉(zhuǎn)子葉片 | 主軸承 | 變速箱低速 | 變速箱中高速 | 發(fā)電機(jī)軸承 | 帶機(jī)艙的塔樓 |
| 微機(jī)電系統(tǒng) | ? | ? | ? | ? | ? | ? |
| 壓電的 | ? | ? | ? | ? | ? | ? |
除了能夠捕獲所有關(guān)鍵故障外,MEMS還具有以下優(yōu)勢:
寬g測量范圍和超低μg/√Hz噪聲密度,輕松滿足表1中的要求。
MEMS具有內(nèi)置的自檢(BIST)功能。系統(tǒng)操作員無需訪問WT即可測試/確保傳感器正確運(yùn)行,從而節(jié)省成本。相比之下,基于壓電的技術(shù)沒有BIST功能。
與基于壓電的解決方案相比,MEMS接口在數(shù)據(jù)接口和電源方面更加靈活。將高阻抗壓電傳感器輸出轉(zhuǎn)換為長電纜的選項有限。最常見的實現(xiàn)方式是2線IEPE接口,它通過第二根地線在共享電源/數(shù)據(jù)線上為壓電傳感器供電。IEPE使用與壓電器件匹配的放大器來提供低阻抗電纜驅(qū)動解決方案。IEPE接口解決方案可用于MEMS傳感器,但MEMS傳感器還可以更輕松地與使用現(xiàn)場總線(RS-485,CAN)或基于以太網(wǎng)的網(wǎng)絡(luò)運(yùn)行的現(xiàn)有系統(tǒng)集成。這是因為MEMS傳感器具有模擬輸出或數(shù)字輸出(SPI,I2C),可以很容易地轉(zhuǎn)移到其他協(xié)議。
環(huán)境性能:WT通常在–40°C至+55°C的溫度下工作,MEMS器件很容易滿足這一要求。
與基于壓電的傳感器相比,MEMS隨著時間的推移具有更好的靈敏度/線性度。ADI公司加速度計的非線性度非常低,通常可以忽略不計。例如,ADXL1001 MEMS加速度計在滿量程范圍內(nèi)的典型非線性度規(guī)格小于0.025%。相比之下,對基于壓電的傳感器進(jìn)行標(biāo)準(zhǔn)化測量的學(xué)術(shù)研究報告了0.5%或更低的非線性。23
目前可用的基于MEMS的振動傳感器和解決方案
傳感器
使用ADXL1002、ADXL1003、ADXL1005和ADcmXL3021 MEMS傳感器可以輕松滿足風(fēng)力渦輪機(jī)應(yīng)用中振動監(jiān)控的所有帶寬、范圍和噪聲密度要求(如表2所示)。ADXL355和ADXL357也適用于風(fēng)力渦輪機(jī)塔架監(jiān)控,具有較低的帶寬和距離測量性能。ADXL355/ADXL357具有出色的直流穩(wěn)定性,這對于測量風(fēng)力渦輪機(jī)塔架傾斜度非常重要。ADXL355/ADXL357密封封裝可確保出色的長期穩(wěn)定性。ADXL355的使用壽命為±3.5 mg以內(nèi),為傾斜測量提供高精度傳感器。
| 微機(jī)電系統(tǒng)傳感器 | 不。軸數(shù) | 范圍(±克) | 帶寬(千赫) | 噪聲密度 (μ克/√赫茲) |
| ADXL355 | 3 | 2, 4, 8 | 0 到 1 | 25 |
| ADXL357 | 3 | 10, 20, 40 | 0 到 1 | 80 |
| ADXL1005 | 1 | 100 | 0 到 23 | 75 |
| ADXL1003 | 1 | 200 | 0 到 15 | 45 |
| ADXL1002 | 1 | 50 | 0 到 11 | 25 |
| ADcmXL3021 | 3 | 50 | 0 到 10 | 26 |
風(fēng)力渦輪機(jī)狀態(tài)監(jiān)測解決方案
無線電
ADI公司提供一整套經(jīng)過驗證的參考設(shè)計、評估系統(tǒng)和即插即用機(jī)器健康傳感器模塊,以加快客戶設(shè)計工作。圖6顯示了ADI公司的無線振動監(jiān)控評估平臺。該系統(tǒng)解決方案結(jié)合了機(jī)械附件、硬件、固件和 PC 軟件,可實現(xiàn)單軸振動監(jiān)測解決方案的快速部署和評估。該模塊可以通過磁性方式或通過螺柱直接連接到電機(jī)或夾具上。它還可以與同一無線網(wǎng)狀網(wǎng)絡(luò)上的其他模塊結(jié)合使用,以提供具有多個傳感器節(jié)點的更廣闊的圖像,作為基于狀態(tài)的監(jiān)控(CbM)系統(tǒng)的一部分。
CbM硬件信號鏈由安裝在模塊底座上的單軸ADXL1002加速度計組成。ADXL1002的輸出被讀入低功耗微控制器ADuCM4050,在那里進(jìn)行緩沖、變換至頻域并流式傳輸?shù)絊martMesh IP微塵。ADXL1002的輸出通過SmartMesh芯片無線傳輸?shù)絊martMesh IP管理器。管理器連接到PC,可以進(jìn)行數(shù)據(jù)的可視化和保存。數(shù)據(jù)顯示為原始時域數(shù)據(jù)和FFT數(shù)據(jù)。有關(guān)時間匯總數(shù)據(jù)的其他匯總統(tǒng)計信息可用。PC端GUI的完整Python代碼以及部署到模塊的C固件可用于客戶適應(yīng)。
有線
ADI公司的Pioneer 1有線CbM評估平臺為ADcmXL3021三軸振動傳感器提供工業(yè)有線鏈路解決方案。CbM硬件信號鏈由一個三軸ADcmXL3021加速度計和一個廣瀨柔性PCB連接器組成。ADcmXL3021 Hirose 連接器具有 SPI 和中斷輸出,連接到接口 PCB,通過數(shù)米的電纜將 SPI 轉(zhuǎn)換為 RS-485 物理層,連接到遠(yuǎn)程主控制器板。SPI 到 RS-485 物理層轉(zhuǎn)換可通過隔離式或非隔離式接口 PCB 實現(xiàn),包括耦合器隔離器 (ADuM5401/ADuM110N) 和 RS-485/RS-422 收發(fā)器 (ADM4168E/ADM3066E)。該解決方案通過一根標(biāo)準(zhǔn)電纜將電源和數(shù)據(jù)結(jié)合在一起,從而降低了遠(yuǎn)程MEMS傳感器節(jié)點的電纜和連接器成本。專用軟件GUI支持ADcmXL3021器件的簡單配置,并通過長電纜捕獲振動數(shù)據(jù)。GUI 軟件支持以原始時域或 FFT 波形的形式實現(xiàn)數(shù)據(jù)可視化。
結(jié)論
本文已經(jīng)證明,基于MEMS的傳感器可以測量風(fēng)力渦輪機(jī)關(guān)鍵系統(tǒng)組件上的所有關(guān)鍵故障。MEMS傳感器帶寬、測量范圍、直流穩(wěn)定性和噪聲密度是理想規(guī)格,在風(fēng)力渦輪機(jī)應(yīng)用中具有出色的性能。
MEMS內(nèi)置自檢(BIST)、靈活的模擬/數(shù)字接口以及隨時間推移的出色靈敏度/線性度是MEMS傳感器成為風(fēng)力渦輪機(jī)狀態(tài)監(jiān)測最佳解決方案的其他原因。維護(hù)系統(tǒng)以檢測基于振動的早期錯誤是一項現(xiàn)代技術(shù),可以防止整個風(fēng)力渦輪機(jī)代價高昂的停機(jī)時間。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2552文章
51302瀏覽量
755246 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6642瀏覽量
110726 -
監(jiān)測系統(tǒng)
+關(guān)注
關(guān)注
8文章
2745瀏覽量
81403
發(fā)布評論請先 登錄
相關(guān)推薦
【源碼】風(fēng)力渦輪機(jī)模型仿真 精選資料分享
求一款陸地風(fēng)力渦輪機(jī)
用于控制現(xiàn)代風(fēng)力渦輪機(jī)的電流傳感器
風(fēng)力渦輪機(jī)和風(fēng)力電場應(yīng)用工業(yè)用光纖產(chǎn)品
怎么用紙板做風(fēng)力渦輪機(jī)
風(fēng)力渦輪機(jī)的工作原理
機(jī)艙式測風(fēng)激光雷達(dá),為風(fēng)力渦輪機(jī)打造“風(fēng)機(jī)之眼”
風(fēng)力渦輪機(jī)狀態(tài)的無線和有線監(jiān)測解決方案
風(fēng)力渦輪機(jī)正在走向數(shù)字化
風(fēng)力渦輪機(jī)可持續(xù)的能源解決方案
無刷滑環(huán)在風(fēng)力渦輪機(jī)上的應(yīng)用
在3D數(shù)字孿生中監(jiān)測風(fēng)力渦輪機(jī)的健康狀況

基于Arduino Uno的風(fēng)力渦輪機(jī)MPPT調(diào)節(jié)器
【虹科新品】HK-MR660系列風(fēng)力渦輪機(jī)的葉片加速度監(jiān)測






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論