") GNSS接收機(jī)的干擾源討論
GNSS接收機(jī)的干擾源討論
全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)的漏洞之一是接收器無法從受損的衛(wèi)星信號中獲得“良好的讀取”。這種不確定性通常是由于缺乏直接視線。本應(yīng)用筆記確定了圍繞地球旋轉(zhuǎn)的星座,然后繼續(xù)討論GNSS接收機(jī)的干擾源。這種徹底的星座和誤差源檢查以對接收機(jī)架構(gòu)的描述結(jié)束,該架構(gòu)通過接受多頻段和多星座信號顯著減少了直接視線誤差。
擔(dān)心 GNSS 不準(zhǔn)確?展開您的 星座
全球?qū)Ш叫l(wèi)星系統(tǒng)的弱點之一 (GNSS)是接收器無法確定其準(zhǔn)確性 從受損的衛(wèi)星信號中定位。這種不確定性 可能是由于 衛(wèi)星和接收器。或者衛(wèi)星可能在地平線上很低, 增加多路徑誤差和信號衰減的風(fēng)險 由于在大氣中傳播。這個招待會 這個問題在世界各地都很普遍,但特別是在 大城市的城市峽谷。
一個不令人滿意的解決方法是依賴WiFi或本地 區(qū)域互聯(lián)網(wǎng)。幾種替代方案接近解決這個問題 接待問題,但最有希望的解決方案是去 回到全球?qū)Ш叫l(wèi)星系統(tǒng)源。
此設(shè)計解決方案首先提供 GNSS 的摘要 衛(wèi)星星座。確定星座后,我們 繼續(xù)討論 GNSS 接收器的干擾 來源。這個徹底的星座和錯誤源 考試以接收器架構(gòu)策略結(jié)束 接受多頻段和多星座信號。
多個星座
GNSS包含多個區(qū)域和全球衛(wèi)星 星座,所有這些都圍繞地球運行。單曲 全球星座提供所需的覆蓋范圍 對 20 到 30 顆衛(wèi)星進(jìn)行分組。
目前,六個衛(wèi)星星座是:
GPS – 第一個 GNSS 系統(tǒng)是 GPS(全球定位) 系統(tǒng))。美國國防部啟動 1970 年代后期的 GPS。全球覆蓋,GPS使用31 民用頻段為L1的星座衛(wèi)星 (1575.42MHz)、L2 (1227.360MHz) 和 L5 (1176.45MHz)。
GLONASS – 俄羅斯全球?qū)Ш叫l(wèi)星系統(tǒng) 星座有24顆衛(wèi)星,頻段為L1 (1598.0625MHz 至 1609.3125MHz) 和 L2 (1242.9375MHz) 至 1251.9375MHz)。這個星座提供全球覆蓋。
北斗 – 中國北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS) 是一項區(qū)域服務(wù),于 12 月開始運營 2012. 到2020年,該星座將擁有35顆衛(wèi)星, B1 (1561.098MHz)、B2 (1207.140MHz) 和 B3 (1268.520MHz)。北斗將提供全球覆蓋。
伽利略 – 伽利略是歐盟的星座和 最終將擁有27顆衛(wèi)星,頻段為E1 (1575.42MHz)、E5a (1176.45MHz、E5b(1207.14MHz 和 E6) (1278.75MHz)。 全球全面覆蓋的時間表是2020年。
IRNSS – 印度區(qū)域?qū)Ш叫l(wèi)星系統(tǒng) 星座有7顆衛(wèi)星,頻段為L5 (1176.45MHz)和S(2492.028MHz)。印度地區(qū) 衛(wèi)星導(dǎo)航系統(tǒng)(IRNSS)提供區(qū)域服務(wù) 到印度及周邊地區(qū)。
QZSS – 日本準(zhǔn)天頂衛(wèi)星系統(tǒng) 星座有4顆衛(wèi)星提供區(qū)域服務(wù) 日本。
全球定位系統(tǒng)誤差源
基本性能的確定 GPS 接收器取決于錯誤管理。降低誤差 提供更高程度的定位精度和可靠性。 接收器設(shè)計人員對整體誤差有直接影響 管理。表 1 量化了 GPS L1 C/A 信號誤差。
表 1.GPS L1 C/A 用戶等效范圍誤差源 (歐瑞爾)影響接收機(jī)的計算精度 位置
| 貢獻(xiàn)來源 | 誤差范圍 |
|---|---|
| 衛(wèi)星時鐘 | ±2米 |
| 軌道誤差 | ±2.5米 |
| 電離層延遲 | ±5米 |
| 對流層延遲 | ±0.5米 |
| 信號到達(dá) | ±3米 |
| 接收器噪聲 | ±0.3米 |
| 多路徑 | ±1米 |
注意:這些誤差的和方根等于 ±6.7m(rms)。
衛(wèi)星時鐘
GPS衛(wèi)星具有非常精確的原子鐘。此級別 準(zhǔn)確性是好消息,但不太好的消息是 少量的原子鐘漂移。即使是很小的誤差 在衛(wèi)星的時鐘中產(chǎn)生一個重要的計算接收器 位置誤差。例如,10ns衛(wèi)星時鐘誤差可以 在地球表面產(chǎn)生 3m 范圍誤差。
地面控制系統(tǒng)的時鐘精度 世界比單個衛(wèi)星更好。這些地面 控制系統(tǒng)監(jiān)控原子鐘的時鐘漂移 每個衛(wèi)星和上傳衛(wèi)星時鐘校正條款,其中 然后由衛(wèi)星向下傳輸?shù)降厍颉R粋€接收器 然后應(yīng)用衛(wèi)星時鐘校正,從而產(chǎn)生 典型殘余范圍誤差為 ±2 米。
軌道誤差
衛(wèi)星遵循圍繞地球的橢圓軌道,這些軌道是 主要由地球引力決定,但一些 對潛在錯誤的擔(dān)憂是由于以下因素:
來自月球和太陽的“第三體”引力效應(yīng)
太陽輻射壓力
地球的非均勻密度
所有這些擾動都需要精確建模才能得到 對衛(wèi)星位置的估計具有足夠的準(zhǔn)確性。
電離層延遲
電離層在 50 公里至 1000 公里之間 地球表面。該層包含帶電離子。 這些離子會導(dǎo)致大量的延遲,這是時變的 。
電離層延遲隨 GNSS 射頻而變化,在 可預(yù)測的方式。通過將計算的偽范圍與 使用在兩個不同 載波頻率,接收器可以準(zhǔn)確估計和 補(bǔ)償電離層延遲。
對流層延遲
離地球最近的大氣層是對流層。 濕度、溫度或大氣壓力的變化 導(dǎo)致對流層延遲的變化。精確的模型 對流層允許對大部分 對流層延遲。
信號到達(dá)時間
GPS接收器估計衛(wèi)星信號的到達(dá)時間 通過比較接收衛(wèi)星的擴(kuò)頻碼序列 使用本地副本。可實現(xiàn)的測量分辨率為 通常為代碼的一個芯片時間的1%,對應(yīng)于 3m量程誤差。
多路徑
多徑信號隨著 GNSS 信號的反射而發(fā)生。 這些信號會反射物體,例如建筑物的墻壁 或被植被擴(kuò)散。
反射信號比原始信號傳播得更遠(yuǎn) 接收器天線。因此,反射信號到達(dá) 略晚于視線信號。有可能 延遲信號會導(dǎo)致接收器計算錯誤。
將多個星座帶入視野
多星座接收器訪問來自 幾個星座。衛(wèi)星數(shù)量的增加是 使用多個星座時的額外好處。
多星座接收器的優(yōu)點包括:
縮短采集時間
提高位置和時間精度
減少建筑物和樹葉阻塞問題 (多路徑錯誤)
克服干擾的有效方法是獲得 來自另一個星座的信號。冗余內(nèi)置于 接收器利用來自各種 星座。
將信號帶回家
如圖5所示,多星座GNSS接收器 需要多個接收器設(shè)備來捕獲各種 頻段信號。完整的前端接收器鏈 具有雙輸入LNA和混頻器,后接濾波器,PGA和 多位ADC,以及小數(shù)N分頻頻率合成器 和晶體振蕩器(圖 6)。
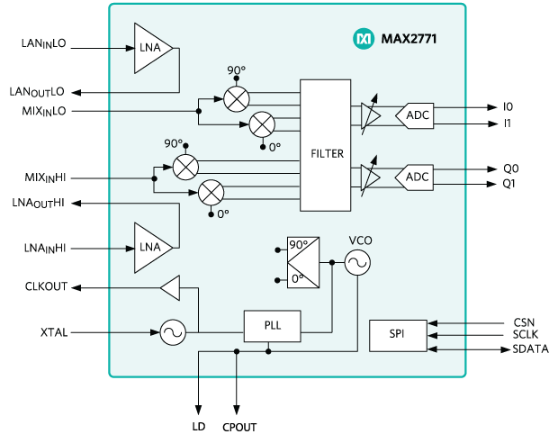
圖6.多頻段通用 GNSS 接收器
圖6中的器件具有可編程IF濾波器帶寬 以及高或低LNA,使其能夠接收信號 來自GPS,伽利略,GLONASS,北斗,IRNSS和QZSS 星座。它支持所有頻段 帶有小數(shù)N分頻合成器的相應(yīng)星座和 集成晶體振蕩器。
結(jié)論
許多元素確保對GNSS有“良好的閱讀” 傳入的衛(wèi)星信號。GNSS 接收器必須接受并且 將衛(wèi)星的小模擬信號充分調(diào)節(jié)到 有用的數(shù)字輸出。此設(shè)計解決方案描述了一個 接收信號的集成接收器前端解決方案 來自六個衛(wèi)星導(dǎo)航星座。這種類型的解決方案 允許多個星座提供準(zhǔn)確、可靠、 并快速估計接收器的位置、速度和時間 使GNSS成為更強(qiáng)大的衛(wèi)星導(dǎo)航系統(tǒng)。
審核編輯:郭婷
-
接收器
+關(guān)注
關(guān)注
14文章
2472瀏覽量
71913 -
接收機(jī)
+關(guān)注
關(guān)注
8文章
1181瀏覽量
53477 -
GNSS
+關(guān)注
關(guān)注
9文章
770瀏覽量
47939
發(fā)布評論請先 登錄
相關(guān)推薦
MAX2769B下一代GNSS接收機(jī)
基于SoC的星載微型GNSS接收機(jī)設(shè)計
采用片上系統(tǒng)(SoC)技術(shù)的星載微型GNSS接收機(jī)的設(shè)計

采用SOC的星載微型GNSS接收機(jī)設(shè)計方案

EMI測試接收機(jī)的抗干擾設(shè)計
BD-GNSS-XK100GNSS接收機(jī)產(chǎn)品特性
簡析GNSS接收機(jī)核心技術(shù)以及特點

GNSS接收機(jī)維護(hù)保養(yǎng)方法
GNSS接收機(jī)產(chǎn)品特性
地質(zhì)災(zāi)害監(jiān)測GNSS設(shè)備?GNSS接收機(jī)
基于微波暗室下的抗干擾接收機(jī)測試研究

GNSS接收機(jī)是什么?怎么分類的?
大壩安全監(jiān)測GNSS接收機(jī):保障水庫安全






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論