 BUFF傳送連的使用調試V1版步驟簡析
BUFF傳送連的使用調試V1版步驟簡析
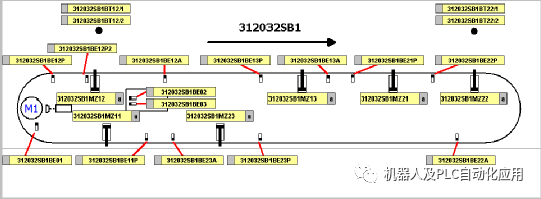
BE23A是存儲區3滿位的檢測開關.
BE12A是存儲區1滿位的檢測開關.
BE13A是存儲區2滿位的檢測開關.
BE22A是存儲區4滿位的檢測開關.
BT12零件檢測
BT22零件檢測
“SB1SKYP”釋放按鈕
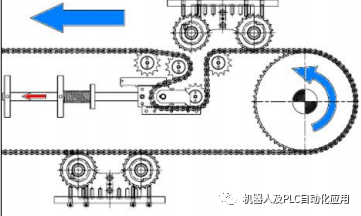
通行檢測傳感器 當小車通過通行檢測傳感器以及上件積放停止器上無小車時,傳感器會將反饋給PLC ,PLC會給出一個可以通行的信號。
PLC將記錄小車離開上件區域,一但第一輛小車達到積放停止器,則消除上一個信號。當小車被檢測處于上件區域時,此記錄會被刪除。
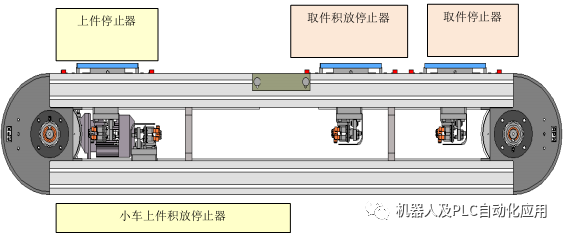
上件區域停止器 上件區域停止器的功能是讓小車處于停止狀態,直到小車被裝上工件后才放行。小車將被鎖定在上件區域停止器處,直到滿足一定的條件才將小車放行至取件積放區域。條件如下:
(1) 有一輛小車在上件區域停止器處;
(2) 工件已被放置在小車上;
(3) 操作者或者上件機器人給出確認信號;
(4) 上件區域停止器未工作,處于待命狀態。
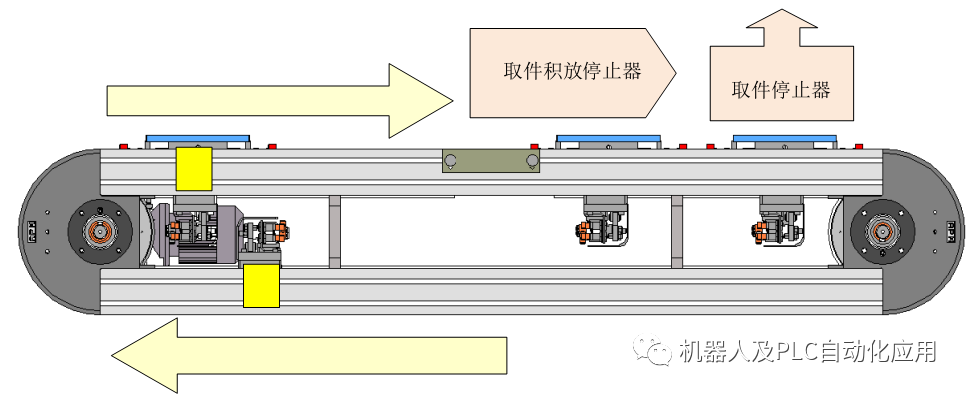
取件區域停止器 小車將被鎖定在取件停止器處,直到滿足一定的條件才將小車放行至上件積放區域。條件如下:
(1) 取件機器人給出“釋放”信號;
(2) 小車處于取件區域停止器處;
(3) 定時(*)信號聯通后
(4) 取件區域停止器未工作,處于待命狀態。
當小車被檢測到離開取件停止器時,該停止器會返回待命狀態。
扭矩控制
積放鏈只要電機沒有超載或者驅動器被檢測到就有一個有效的信號,以防止過載。
這個信號必須被編寫成一個可觸發關閉程序來檢測和解決積放鏈的過載問題的形式。
這個信號能連接到其它安裝到積放裝置安全信號的程序。包括緊急關閉信號、啟動開關、安全保險和掃描儀等。
運行時通過一個位于電機區域的傳感器檢測。這個傳感器通常感應電機支撐板的存在。
如果電機過載,它沿軸自轉直到移出覆蓋探測器5°的面積。檢測信號的變換,將停止輸送工作。
這個信號禁止因為任何原因而關閉。由于此信號關閉而發生故障TUENKERS將不承擔對器材、零件、設備或人造成損害的所有責任。
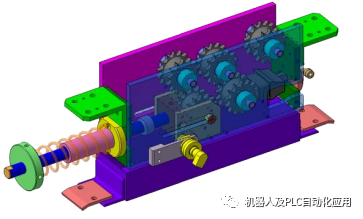
張緊機構
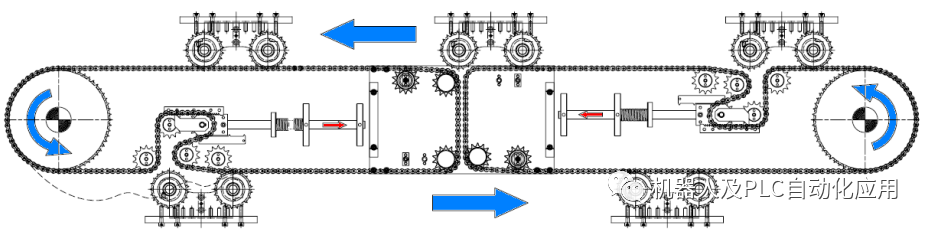
為了保證積放鏈鏈條的張緊力,TUENKERS設計了一個動態的張緊機構。
這個裝置的組成是基于一個機械系統的動作,通過彈簧的壓縮帶動調節小齒輪并作用于鏈條上,從而達到鏈條張緊松弛。從而延伸鏈條循環的路徑,保持鏈條在一個恒定的張緊力下。
特別注意鑲嵌在板上的刻度尺,刻度尺顯示目前鏈條拉緊的狀態。當移動桿的中心,即安裝小齒輪的中心,如圖1中的位置,鏈條張緊裝置的操作是無效的。
當移動桿的中心在另一側在如圖2中的位置時,為使這個設備能正常使用,當到達這個點時,必須要手工重新張緊,鏈條行程已經增加,需要重新啟動設備。
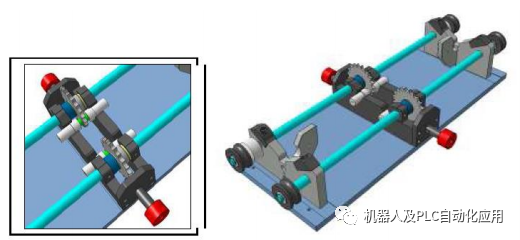
停止器
停止器是一種按照上件、取件和積放位置來定義積放鏈外形的一種裝置。它的功能是確保輸送小車停止在一個精確的位置。
它是唯一一個用氣動來控制的部件。停止器停止或放行小車的動作,是通過一個雙向動作氣缸來執行的。
停止器裝有檢測傳感器來檢測氣缸的打開狀態,從而確保有一輛小車停止在停止器上。停止器上還有一個防倒退裝置,來保證小車不會在停止器上后退。
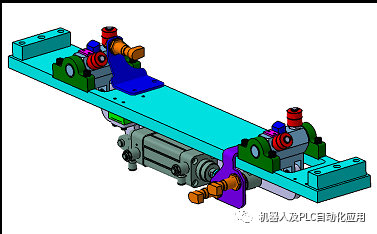
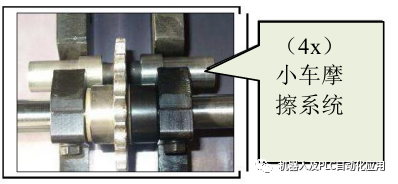
每個小車上的兩個鏈輪處都要各配兩個摩擦棒,以保證鏈輪上的摩擦力。
1.描述:
1.MZ11停止器的R是阻擋V是放行,當托盤在MZ11上方時B11P檢測托盤,此時MZ12上沒有托盤,沒有BT12/1和BT12/2(零件檢測),這是MZ11伸出V,放行托盤當沒有B11P時MZ11立刻返回R.
2.MZ23停止器: 當托盤來到停止器MZ23處時被B23P檢測到后,等待MZ11在R位和BE23A信號(存儲區滿位信號).如果存儲區沒有滿,MZ11在R位則MZ23伸出V,釋放空托盤,當B23P檢測不到零件時,MZ23返回R.
3.MZ12停止器 :當托盤正在MZ12處 ,擋在 B12P托盤檢查開關 ,BT12零件檢測開關有件,1區滿BE12A檢測開關沒有被接觸,當操作者拍釋放按鈕時“SB1SKYP”MZ 12伸出V,當B 12P 檢測不到托盤后MZ 12返回R 。
4.MZ13停止器 :MZ21在原位R,BE13A第2存儲區沒滿,BE13P上有托盤,此時可以打開MZ13停止器伸出V,BE13P無檢測則MZ13返回R
5.MZ21停止器 :BE22P上無擋板,MZ21的BE21處有擋板,機器人發出釋放安全信號,MZ22在原位R位,則MZ21伸出V, BE21P無托盤信號檢測則MZ21返回R
6.MZ22停止器 :BE22A前方存儲區滿位無信號,BE22P托盤檢測有信號,MZ23在返回位置R,托盤上的零件被拿走SB1/KT22, 機器人發出釋放安全信號,則MZ22伸出V放行托盤, , BE22P無托盤信號檢測則MZ22返回R
托盤檢測的轉換.
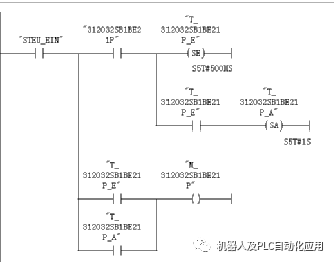
當BEXXP開關檢測到零件的時候,先觸發延遲接通,在觸發延時斷開,是為了避免出現托盤在經過時的停止器的誤動作,造成夾緊發卡.
使用FB400控制各停止缸動作.
使用FB476和FB380來控制住電機旋轉.
FB476
該模塊用于電機的前向或后向行進控制。
電機后向行進控制:
出現實際聯鎖("Ve_rR" = TRUE) 和釋放“ 自動 ” 信號時,電機可在“ 后向 ”(Back)釋放信號("Frg_R" = TRUE) 的作用下向后行進。釋放“手動” 期間,可在可視化功能中采用實際聯鎖功能打開電機。
有兩個選件可以控制電機后向行進:
?按鈕 “打開”(On) 已經顯示出來 ("Cfg Bit 00"= TRUE) 。
如果“打開”(On)鍵顯示出來,采用單擊操作即可激活該鍵。
此后,如果按下了鍵“R”(后向行進),電機將向后運動(“R” 發綠色閃爍光)。如果再次按“R” ,電機將停止轉動(發閃爍光,并停止)。
?按鈕 “打開”(On) 被隱藏 ("Cfg Bit 00" = FALSE)
如果按鈕“ 打開 ”(On)未顯示出來,電機將后向行進,直至按鈕“R” 被按下并保持不放。松開按鈕后,電機將立即停止轉動。
電機前向行進控制:
出現聯鎖 ("Ver_V" = TRUE) 信號和釋放“ 自動 ” 信號時,電機可在“ 前向 ”(Front)釋放信號("Frg_V" = TRUE) 的作用下向前行進。釋放“手動” 期間,可在可視化功能中采用實際聯鎖功能打開電機。
有兩個選件可控制電機前向行進:
? 按鈕 “打開”(On) 已顯示出來("Cfg Bit 00" = TRUE)
如果出現了按鈕“打開”(On),單擊該按鈕即可激活該鍵。此時,按下“V” (前向行進)按鈕后,電機將前向行進(“V” 顯示為藍色閃爍)。再次按下“V”, 電機將停止運動(“ 停止” 顯示為閃爍狀態)。
?按鈕 “打開”(On) 被隱藏("Cfg Bit 00" = FALSE)
如果未顯示按鈕“打開”(On) ,則電機只在按下“V”按鈕且保持不放的情況下前向行進。 松開按鈕后,電機將立即停止轉動。
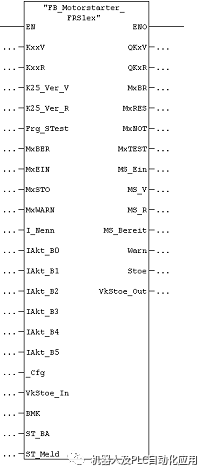
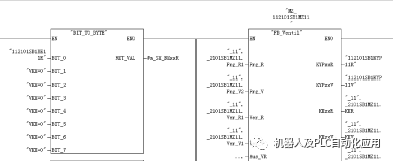
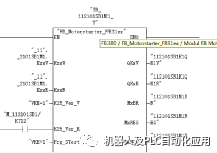 FB380
FB380
采用該塊,可以利用可選 X1/X2 制動器控制裝置對 RS1e-x 電機起動器進行控制。
輸入:
KxxV BOOL 前向行進使能 KxxR BOOL 后向行進使能 K25_Ver_V BOOL 采用信息畫面控制功能對電機前向行進進行聯鎖 K25_Ver_R BOOL 采用信息畫面控制功能對電機后向行進進行聯鎖 Frg_STest BOOL 分勵脫扣/ 起動器斷路器自檢使能 MxBER BOOL 電機起動器就緒,來自電機起動器 MxEIN BOOL 電機起動器已打開,來自電機起動器 MxSTO BOOL 電機起動器組故障
輸出位:
QKxV BOOL電機起動器前向行進控制
QKxR BOOL 電機起動器后向行進控制
MxBR BOOL 電機起動器制動控制
MxRES BOOL 電機起動器復位控制
MxNOT BOOL 電機起動器緊急啟動控制
MxTEST BOOL 電機起動器自檢控制 F-RS1e-x
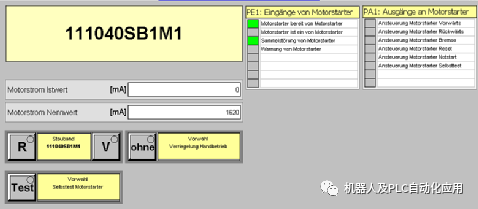
通過6個電流位實現了實際電流讀取:
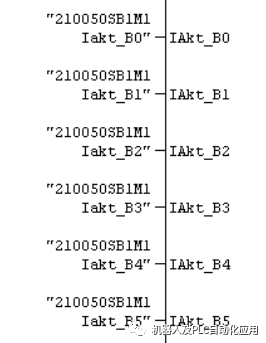
顯示實際電流與額定電流

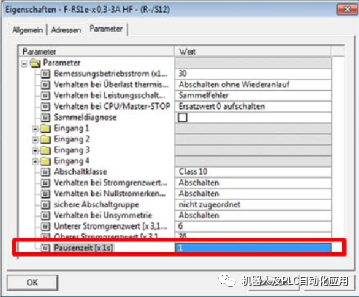
電機起動器空閑時間
該空閑時間是為運行停機(即,不是過載脫扣)后的冷卻而定義的時間。該時間結束后,電機起動器的 “熱記憶”被設置成 0% 。
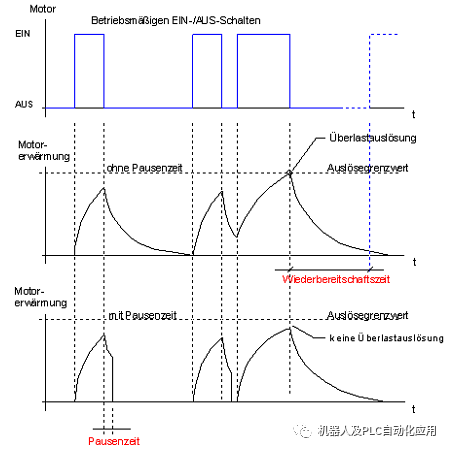
例如,對于以間隔時間定時打開和關閉的輸送帶(運行時間短),未成功設置空閑時間將可能因觸發閾值變化而導致過載故障。
例如,通過設置 1 秒空閑時間避免熱模型中因電機溫度上升而觸發過載。電機必須針對該功能進行相關設計。
審核編輯:劉清
-
傳感器
+關注
關注
2552文章
51302瀏覽量
755249 -
驅動器
+關注
關注
53文章
8263瀏覽量
146703 -
電機控制
+關注
關注
3538文章
1889瀏覽量
269037 -
plc
+關注
關注
5014文章
13347瀏覽量
464442
原文標題:BUFF傳送連的使用調試V1版
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
DS-AN4V724-A CN V1 集成式霍爾電流傳感器-芯森電子
SC171開發套件V1 技術資料
巖土工程監測中振弦采集儀的布設方案及實施步驟簡析

簡析智慧燈桿一鍵告警功能的實用場景

CMSIS-RTOS V1與V2的區別是什么?
STM32CubeMX怎么修改能讓Rx_buff和Tx_Buff變小?
簡析電氣火災的原因及其對策
【鴻蒙】OpenHarmony 4.0藍牙代碼結構簡析
簡析電動汽車充電樁檢測技術應用及分析





 工商網監
工商網監
評論