 步進電機的基本參數及梯形加減速算法
步進電機的基本參數及梯形加減速算法
1 背景
在2021年接觸到步進電機,當時是用來驅動熱敏打印機,沒有用到加減速算法,速度時間表好像是日本客戶那邊提供過來的,這次調試加減速算法,遇到了不少問題,在這里記錄一下,希望能幫到未來對此有困惑的自己,如果能幫到其他人也算是有幸。
2 步進電機基本參數
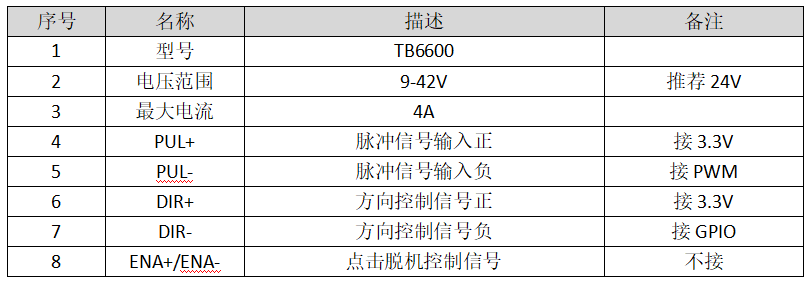
2.1 驅動器
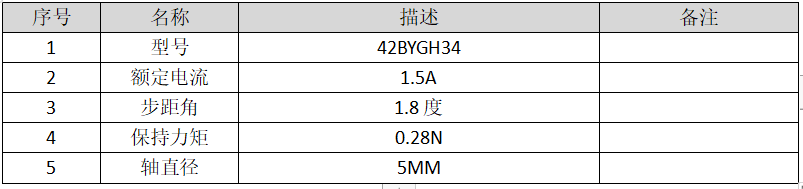
2.2 電機
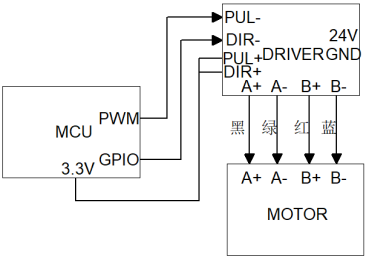
2.3 接線
2.4 細分及電流配置

2.5 驅動方式
一般有3種:定時器中斷+GPIO、GPIO+延時、PWM比較輸出,這里使用的是PWM比較輸出模式,在比較中斷中不斷地更新PWM周期來達到改變速度的目的。
3 梯形加減速算法
3.1 推導過程
3.1.1 組成部分
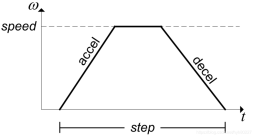
步進電機的動作過程是由加速、勻速、減速三個部分組成,轉速的單位是rpm,每分鐘多少轉,最終需要rpm轉換成每秒的脈沖數也就是頻率,速度越快頻率越大,對應的脈沖周期T就越小。
3.1.2 速度和脈沖周期的關系
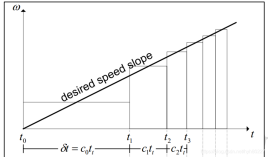
第1個脈沖周期t=t1-t0,第2個脈沖周期t=t2-t1,那么t=計數值*計數時間,例如72MHz的情況下,定時器預分配為72-1,計數值設置為0xFFFF,脈沖周期t=65535*(1/1MHz),使用PWM的翻轉模式,翻轉模式下,2次翻轉為一個完整脈沖,那么設置比較值為0xFFFF/2,那么t=65.535ms,速度pps=15.2Hz,也就是1秒鐘15.2個脈沖。
3.1.3 加速度和距離的關系
s=vot + (1/2)at2,由于初速度為0,那么S=(1/2)*a*t2
s=alpha(步距角)*n(脈沖數),那么(1/2)at2=alpha*n
整個加速時間t=tn-t0,t0=0,那么tn=t,那么tn=√(2*n *alpha/a)
tn=cn*tt(計數時間)
3.1.4 下一個脈沖計數
cn*tt=t(n+1)-tn=√(2*(n-1) *alpha/a)-√(2*(n) *alpha/a)
cn=1/tt (√(n+1)-√n)√(2*alpha/a)
c0=1/tt √(2alpha/a)
cn=c0*(√(n+1)-√n)
根據麥克勞林公式
√(n+-1) = 1+-1/2n-1/8*n2+O(1/n3)
cn/cn-1 = c0(√(n+1)-√n)/c0(√(n)-√n-n)
最終化簡后得到
cn=cn-1 - (2cn-1 / 4n+1)
3.1.5 誤差和放大倍數
當n=1時有0.4485的偏差,將C0乘以0.676來解決這個誤差
假設主頻為72M預分頻系數為72-1,那么
C0 = 10000000.676√(2alpha/a)
為了保證計算的精度,需要對相關變量進行放大處理,這里對加速度放大10倍
C0=10000000.676 √(2alpha/a10)
那么對2*alpha乘以100000,
根號中2alpha100000/a10=2alpha*10000/a
100*√(2*alpha/a)
對1000000*0.676除以10倍,然后再對整個結果除以10,那么
C0=(10000000.676 /10√(2*alpha/a))/10
3.1.6 相關宏定義
#define FSPR 200
#define MICRO_STEP 8
#define SPR (FSPR*MICRO_STEP)
#define ALPHA 2*3.14159/SPR
#define GAIN_X 10
#define FREQUENCY_1 1000000*0.676/GAIN_X
#define ALPHA_2_GAIN_100000 2ALPHA100000
3.2 單位轉換
通常情況下加減速時間(ms)、最大速度(mm/s)、距離(mm)是已知的,我們需要將轉速mm/s轉換成角速度(rad/s),將加減速時間轉換成加速度(rad/sec^2)
已知公式角速度=轉速*2π/60
假設轉速有9.55rpm,那么角速度=9.5523.14159/60=1(rad/s)
3.2.1 單位轉換相關宏定義
假設軸直徑是5mm,默認情況下1轉的距離是(5*3.1415)
#define CONFIG_ROUND_MM (5*3.1415)
#define MMPS_TO_RPM(SPEED) (SPEED*60/CONFIG_ROUND_MM)
#define RPM_TO_RADPS(SPEED) (SPEED*2π/60)
#define MMPS_TO_RAD_PS(SPEED) (SPEED*2π/CONFIG_ROUND_MM)
#define MMPS_TO_RAD_0_1_PS(SPEED) (SPEED102π/CONFIG_ROUND_MM)
3.3 代碼部分
3.3.1 初始化
PA1作為PWM,PA2作為DIR
TIM_HandleTypeDef htim2;
void TIM_PWM_Init(u16 arr,u16 psc)
{
TIM_OC_InitTypeDef sConfigOC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = psc;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = arr;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
htim2.Init.RepetitionCounter = 0;
HAL_TIM_OC_Init(&htim2);
sConfigOC.OCMode = TIM_OCMODE_TOGGLE;;
sConfigOC.Pulse = arr/2;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_OC_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2);
HAL_TIM_Base_Start(&htim2);
}
void HAL_TIM_OC_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM2)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_TIM2_CLK_ENABLE();
__HAL_AFIO_REMAP_TIM2_PARTIAL_2();
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_Initure.Pin=GPIO_PIN_1; //PB5
GPIO_Initure.Mode=GPIO_MODE_AF_PP;
GPIO_Initure.Pull=GPIO_PULLUP;
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
HAL_NVIC_SetPriority(TIM2_IRQn, 2, 2);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
}
3.3.2 加減速算法初始化
輸入參數是總步數、加減速時間ms、最大速度mm/s
__IO uint16_t tim_count; /* 達到最大速度時的步數*/
__IO uint32_t max_s_lim; /* 必須要開始減速的步數(如果加速沒有達到最大速度)*/
__IO uint32_t accel_lim;
if(g_motion_sta != STOP) /* 只允許步進電機在停止的時候才繼續*/
return;
__IO int32_t accel = (speed*1000)/accel_time_ms;
__IO int32_t decel = accel;
if(step < 0) /* 步數為負數 */
{
g_srd.dir = CCW; /* 逆時針方向旋轉 */
step = -step; /* 獲取步數絕對值 */
}
else
{
g_srd.dir = CW; /* 順時針方向旋轉 */
}
if(step == 1)
{
g_srd.accel_count = -1;
g_srd.run_state = DECEL;
g_srd.step_delay = 1000;
}
else if(step != 0) /* 如果目標運動步數不為0*/
{
g_srd.min_delay = (int32_t)(A_T_x10 /speed); //勻速運行時的計數值
g_srd.step_delay = (int32_t)((T1_FREQ_148 * sqrt(A_SQ / accel))/10); /* c0 */
max_s_lim = (uint32_t)(speed*speed / (A_x200*accel/10));/* 計算多少步之后達到最大速度的限制 max_s_lim = speed^2 / (2*alpha*accel) */
if(max_s_lim == 0) /* 如果達到最大速度小于0.5步,我們將四舍五入為0,但實際我們必須移動至少一步才能達到想要的速度 */
{
max_s_lim = 1;
}
accel_lim = (uint32_t)(step*decel/(accel+decel)); /* 這里不限制最大速度 計算多少步之后我們必須開始減速 n1 = (n1+n2)decel / (accel + decel) */
if(accel_lim == 0) /* 不足一步 按一步處理*/
{
accel_lim = 1;
}
if(accel_lim <= max_s_lim) /* 加速階段到不了最大速度就得減速。。。使用限制條件我們可以計算出減速階段步數 */
{
g_srd.decel_val = accel_lim - step; /* 減速段的步數 */
}
else
{
g_srd.decel_val = -(max_s_lim*accel/decel); /* 減速段的步數 */
}
if(g_srd.decel_val == 0) /* 不足一步 按一步處理 */
{
g_srd.decel_val = -1;
}
g_srd.decel_start = step + g_srd.decel_val; /* 計算開始減速時的步數 */
if(g_srd.step_delay <= g_srd.min_delay) /* 如果一開始c0的速度比勻速段速度還大,就不需要進行加速運動,直接進入勻速 */
{
g_srd.step_delay = g_srd.min_delay;
g_srd.run_state = RUN;
}
else
{
g_srd.run_state = ACCEL;
}
g_srd.accel_count = 0; /* 復位加減速計數值 */
}
g_motion_sta = 1; /* 電機為運動狀態 */
tim_count=__HAL_TIM_GET_COUNTER(&htimx_STEPMOTOR);
__HAL_TIM_SET_COMPARE(&htimx_STEPMOTOR,STEPMOTOR_TIM_CHANNELn,tim_count+g_srd.step_delay/2); /* 設置定時器比較值 */
3.3.4 中斷處理
void TIM2_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim2);
}
void HAL_TIM_OC_DelayElapsedCallbackstepper_ctl_t *p_ctl,(TIM_HandleTypeDef *htim)
{
__IO static uint8_t i = 0;
uint32_t capture = 0;
if(htim==p_ctl->htim)
{
capture = tmr_channel_value_get(p_ctl->tmr_x, p_ctl->timer_channel);
tmr_channel_value_set(p_ctl->tmr_x, p_ctl->timer_channel, capture + p_ctl->step_delay/2);
if (STOP_MONITOR_LEVEL == rt_pin_read(STOP_PIN))
{
stepper_ctl_stop(p_ctl);
}
i++;
if (i == 2)
{
i = 0;
if (IRON_ACTION_RUN == p_ctl->action_type)
{
switch(p_ctl->run_state)
{
case STOP:
{
stepper_ctl_stop(p_ctl);
p_ctl->step_count = 0;
p_ctl->rest_delay = 0;
p_ctl->last_accel_delay = 0;
p_ctl->new_step_delay = 0;
i = 0;
}
break;
case ACCEL:
{
p_ctl->step_count++;
if (p_ctl->dir == CW)
{
p_ctl->step_position++;
}
else
{
p_ctl->step_position--;
}
p_ctl->accel_count++;
p_ctl->new_step_delay = p_ctl->step_delay - (((2 *p_ctl->step_delay) + p_ctl->rest_delay)/(4 * p_ctl->accel_count + 1));
p_ctl->rest_delay = ((2 * p_ctl->step_delay)+p_ctl->rest_delay)%(4 * p_ctl->accel_count + 1);
if (p_ctl->step_count >= p_ctl->decel_start)
{
p_ctl->accel_count = p_ctl->decel_val;
p_ctl->run_state = DECEL;
get_acc_real=p_ctl->step_count;
}
else if (p_ctl->new_step_delay <= p_ctl->min_delay)
{
p_ctl->last_accel_delay = p_ctl->new_step_delay;
p_ctl->new_step_delay = p_ctl->min_delay;
p_ctl->rest_delay = 0;
p_ctl->run_state = RUN;
get_acc_real=p_ctl->step_count;
}
}
break;
case RUN:
{
p_ctl->step_count++;
if (p_ctl->dir == CW)
{
p_ctl->step_position++;
}
else
{
p_ctl->step_position--;
}
p_ctl->new_step_delay = p_ctl->min_delay;
if (p_ctl->step_count >= p_ctl->decel_start)
{
p_ctl->accel_count = p_ctl->decel_val;
p_ctl->new_step_delay = p_ctl->last_accel_delay;
p_ctl->run_state = DECEL;
}
}
break;
case DECEL:
{
p_ctl->step_count++;
if (p_ctl->dir == CW)
{
p_ctl->step_position++;
}
else
{
p_ctl->step_position--;
}
p_ctl->accel_count++;
p_ctl->new_step_delay = p_ctl->step_delay - (((2 * p_ctl->step_delay) + p_ctl->rest_delay)/(4 * p_ctl->accel_count + 1));
p_ctl->rest_delay = ((2 * p_ctl->step_delay)+p_ctl->rest_delay)%(4 * p_ctl->accel_count + 1);
if (p_ctl->accel_count >= 0)
{
p_ctl->run_state = STOP;
}
}
break;
default:
{
}
break;
}
p_ctl->step_delay = p_ctl->new_step_delay;
}
else if (IRON_ACTION_MANUAL == p_ctl->action_type)
{
p_ctl->step_count++;
if (p_ctl->step_count >= p_ctl->manual_limit_steps)
{
stepper_ctl_stop(p_ctl);
p_ctl->step_count = 0;
}
}
else if (IRON_ACTION_RESET == p_ctl->action_type)
{
p_ctl->step_count++;
if (p_ctl->step_count >= p_ctl->manual_limit_steps)
{
stepper_ctl_stop(p_ctl);
p_ctl->step_count = 0;
}
if (ZERO_MONITOR_LEVEL == rt_pin_read(ZERO_PIN))
{
stepper_ctl_stop(p_ctl);
}
}
}
}
}
3.3.5 測試
3.3.5.1 測試生成指定脈沖個數
生成10個脈沖,脈沖寬度為1*0xFFFF/1000000=0.065535S
#define MAX_TIMER_CNT 0xFFFF
TIM_PWM_Init(MAX_TIMER_CNT,TIM_PRESCALER);
uint32_t set_cnt_pwm = 10;
uint32_t get_acc_real = 0;
uint32_t set_cnt_pwm = 10;
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
__IO uint32_t tim_count = 0;
__IO uint32_t tmp = 0;
__IO static uint8_t i = 0;
if(htim->Instance==TIM2)
{
tim_count = __HAL_TIM_GET_COUNTER(&htimx_STEPMOTOR);
tmp = tim_count + MAX_TIMER_CNT/2;
__HAL_TIM_SET_COMPARE(&htimx_STEPMOTOR,STEPMOTOR_TIM_CHANNELn,tmp);
i++;
if(i == 2)
{
i = 0;
if(i == 2)
{
i = 0;
set_cnt_pwm--;
if (0 == set_cnt_pwm)
{
set_cnt_pwm = 10;
HAL_TIM_OC_Stop_IT(&htim2,TIM_CHANNEL_2);
}
}
}
}
}
實測波形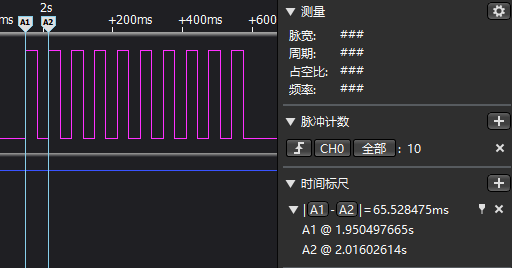
3.3.5.2 測試設置指定參數
如果一圈的脈沖數是1600,位移是5*3.14159mm,那么100mm/s就需要10185.9個脈沖每秒,1000000/10186,那么最大速度時的計數為98,脈沖周期也就是98us左右
#define CONFIG_SPEED_MMPS 100
#define MMPS_TO_RAD_0_1_PS(SPEED) ((SPEED*2*3.14159*10)/5*3.14159)
float set_speed = MMPS_TO_RAD_0_1_PS(CONFIG_SPEED_MMPS);
create_t_ctrl_param(CONFIG_STEPS_PER_ROUND*2, 100, set_speed);
實測波形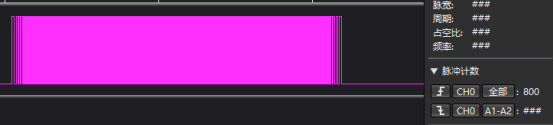
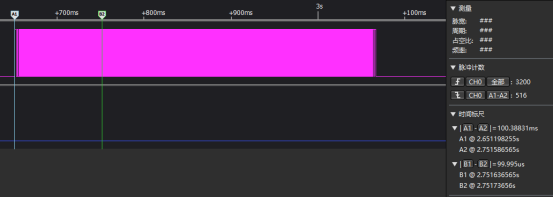
A1-A2的時間剛好是100ms,脈沖個數是516個,這個加速階段的步數比理論值要大,
脈沖周期是100us左右,比理論上要大2us。
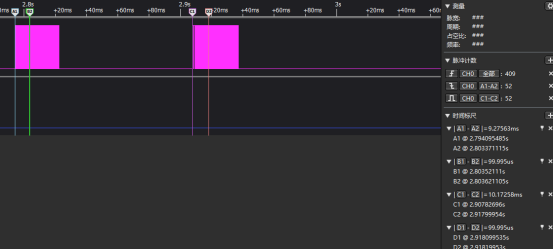
3.3.5.3 測試執行連續的動作
假設需要完成2個動作,每一次的距離是2mm,間隔是200ms,2mm對應的步數=204
#define ROUND_UP_CNT_GAIN_100 (50)
#define ROUND_UP(M,N) ((((M*100)/N)+ROUND_UP_CNT_GAIN_100)/100)
#define CONFIG_STEPS_PER_ROUND (1600)
uint32_t distance_to_steps_mm_gain(uint32_t set_mm_gain, uint32_t set_gain)
{
uint32_t set_gain_val = CONFIG_ROUND_MM*set_gain;
return ROUND_UP(set_mm_gain*CONFIG_STEPS_PER_ROUND,set_gain_val);
}
create_t_ctrl_param(distance_to_steps_mm_gain(200,100), 10, set_speed);
HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_2);
while (g_motion_sta)
{
}
delay_ms(200);
create_t_ctrl_param(distance_to_steps_mm_gain(200,100), 10, set_speed);
HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_2);
實測波形
4 實測效果
正向轉4次,每次1圈,速度是10mm/s,反向轉1次,轉1圈,速度是2mm/s
-
算法
+關注
關注
23文章
4612瀏覽量
92901 -
步進電機
+關注
關注
150文章
3111瀏覽量
147487 -
定時器
+關注
關注
23文章
3248瀏覽量
114821 -
加減速算法
+關注
關注
0文章
7瀏覽量
7170 -
驅動方式
+關注
關注
0文章
15瀏覽量
7398
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論