 振弦采集模塊配置工具VMTool的常見功能
振弦采集模塊配置工具VMTool的常見功能
振弦采集模塊配置工具VMTool的常見功能
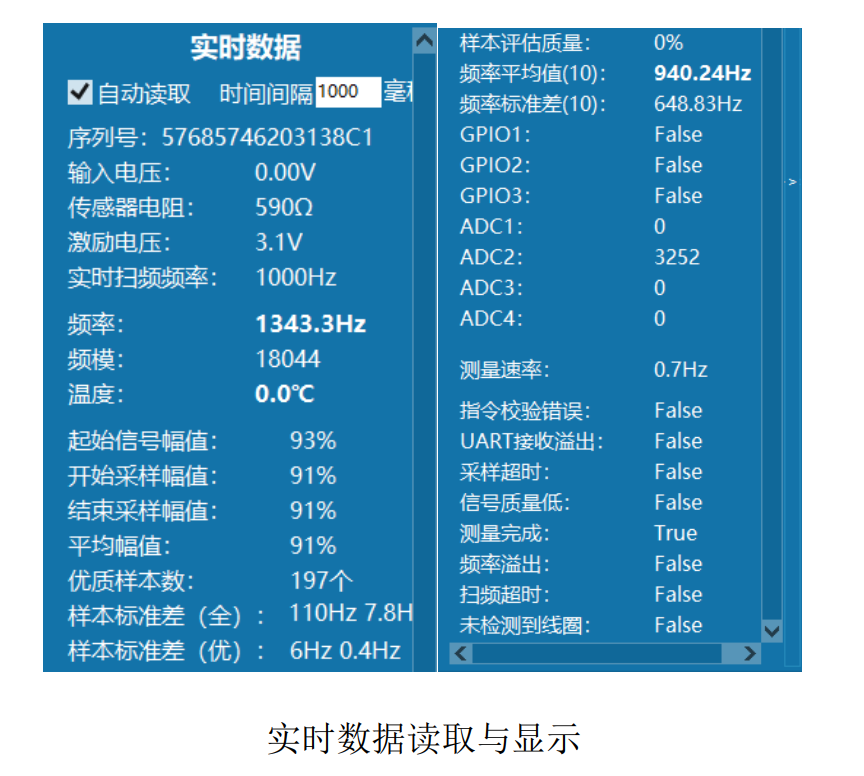
一、實時數據讀取
當 VMTool 與模塊為連接狀態時( 4.3.1 模塊的連接與斷開), 勾選實時數據區的【 自動讀取】 復選框, VMTool 開始自動向模塊發送實時數據讀取指令, 修改【 時間間隔】 文本框內的數值可改變相鄰兩條讀取指令的時間間隔, 單位為毫秒。 自動發送讀取指令后, VMTool 等待模塊返回實時數據, 直到模塊返回了正確的實時數據后才會啟動下次指令發送。
振弦采集模塊配置工具VMTool
實時數據區中各物理量的含意見第 3 章中的相關寄存器說明。
測量頻率: VMTool 根據最后兩次收到 VMXXX 實時數據的時間差估算得到的數據接收速率。由于 VMXXX 模塊采用測量優先的工作策略, 若模塊“ 正忙” 時收到指令,則會等待當前測量完成后才會響應并執行指令, 返回指令的響應信息, 故此, 當使用本節介紹的“ 自動讀取” 功能時, 將讀取時間間隔設置為小于模塊實際測量速率的值, 此時模塊每次的測量結果均被讀取到,這種情況下計算得出的數據接收速率其實就是模塊的讀數速率。 如:若通過觀察,模塊的讀數速率為 1Hz 左右時,此處的自動讀取時間間隔應設置為比 1000 毫秒低的值,推薦為 500ms, 這樣得到的測量頻率值就是模塊讀數速率,若此時時間間隔設置為大于 1000ms 的值時,得到的測量頻率值僅能說明界面的更新速率,而與模塊的讀數速率沒有直接關系。
運行狀態: 包括指令校驗、采樣超時等數個運行狀態標志, True 表示狀態為真(或“ 是” ),False 表示狀態為假(或“ 否” )。

振弦采集模塊
二、軟件握手協議
VMTool 支持與模塊之間的軟件握手協議, 在模塊啟用了軟件握手前提下( 詳見“3.7 小節中關于軟件握手的說明” ), VMTool 可以利用軟件協議實現僅在模塊處于空閑時才會向模塊發送指令。通過點擊主界面指令區內的握手協議下接框,選擇【 軟件握手】 選項,開啟 VMTool 的軟件握手功能。 啟用軟件握手之前, 向模塊發送指令后模塊通常不會立即響應( 數據發送指示器閃爍后數據接收指示器不會立即閃爍), 啟用軟件握手之后, 會觀察到數據發送指示器閃爍后數據接收指示器也會立即閃爍,即: 向模塊發送的指令得到了即時響應。
若 VMTool 開啟了軟件握手功能而 VMXXX 模塊未開啟此功能時, 會導致 VMTool 因為未接收到有效的軟件握手協議信號而長時間處于指令準備發送狀態,并在等待超時后才會向模塊發送,從 VMTool 狀態欄可以觀察到這一過程,會有正在檢測模塊軟件握手信號和未檢測到軟件握手信號顯示。
審核編輯:湯梓紅
-
模塊
+關注
關注
7文章
2725瀏覽量
47609 -
寄存器
+關注
關注
31文章
5359瀏覽量
120790 -
采集模塊
+關注
關注
0文章
138瀏覽量
9616
發布評論請先 登錄
相關推薦









 工商網監
工商網監
評論