 基于STM32F407主控芯片的發動機轉速/相位發生器設計方法分享
基于STM32F407主控芯片的發動機轉速/相位發生器設計方法分享
摘要
STM32F407包含Cortex-M4內核,共有14路TIM資源,其中TIM2和TIM5具有32位計數功能,其他為16位計數功能。本文將以TIM2實現發動機轉速/相位發生器的設計,并通過串口屏幕顯示。文章給出了具體的電路的硬件設計及軟件設計流程,并給出設計說明。經實踐證明,該發生器據有可靠、穩定、精確的特性。
發動機轉速傳感器是一種感應式傳感器,獲取發動機轉速和曲軸準確角度位置(輸入系統)。在飛輪上安裝有一個單獨用于發動機轉速傳感器的信號輪。
信號輪被設計成一個帶有很多齒段的輪,共分成60個齒段.每當信號輪轉過傳感器,就會產生一個交流電壓,其頻率隨看轉速而變化。頻率即是轉速的高低.為了識別曲軸位置,信輪在兩個齒段之間有一段空隙.發動機轉速傳感器用于識別發動機轉速.它與霍爾傳感器一起識別發動機1缸點火上止點,從而確定噴油時間和點火正時。
相位傳感器是凸輪軸位置傳感器和曲軸位置傳感器的統稱,是發動機點火時刻的判斷重要依據。凸輪軸相位傳感器是用于檢測凸輪軸轉動位置的一種傳感器,也是一個一個氣缸判別定位裝置,向ECU輸入凸輪軸位置信號,是點火控制的主控信號。曲軸位置傳感器是電噴發動機特別是集中控制系統中最重要的傳感器,也是點火系統和燃油噴射系統共用的傳感器。其功能是檢測發動機曲軸轉角和活塞上止點,并將檢測信號及時送至發動機電腦,用以控制點火時刻(點火提前角)和噴油正時。同時,曲軸位置傳感器亦是測量發動機轉速的信號源。
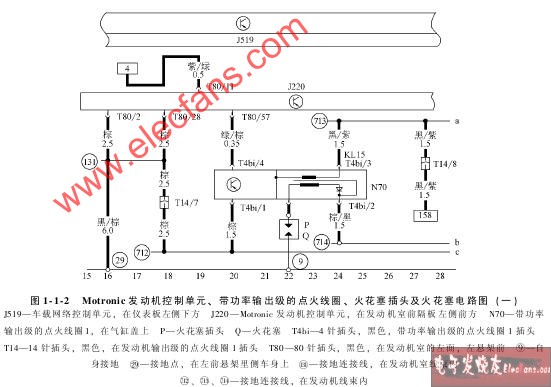
發動機轉速與相位傳感器的波形關系大約如下:
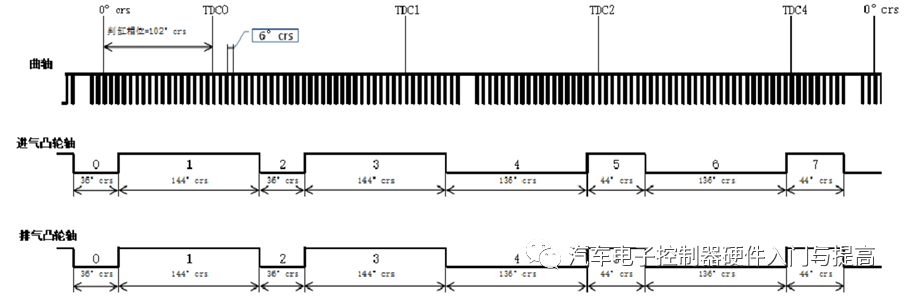
圖1:轉速與相位關系圖
1 系統介紹
系統將旋變解碼器處理的旋變編碼器的信號通過RS485送入STM32主控制器,主控制器根據不同的信號做出判斷,從而控制驅動輸出不同的轉速和相位信號,并通過RS232控制串口屏幕顯示。如下圖2系統圖、圖3轉速發生電路原理圖、圖4相位發生電路原理圖、圖5顯示屏幕電路原理圖:
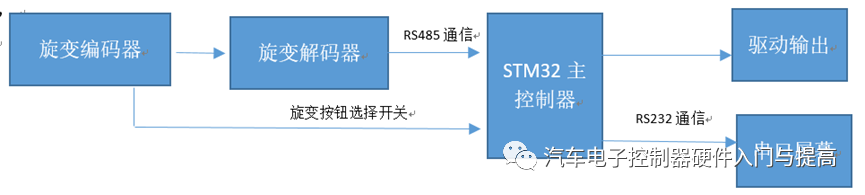
圖2:系統圖
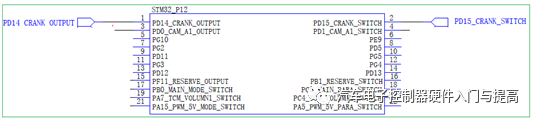
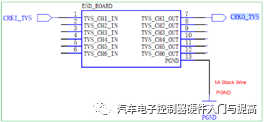
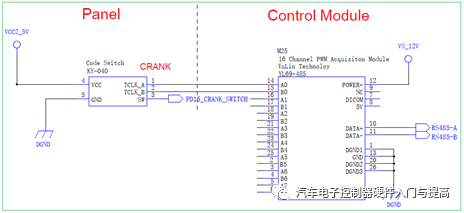
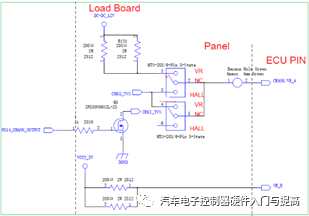
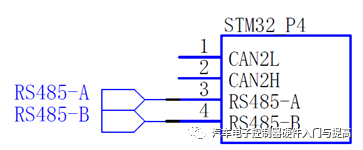
圖3:轉速發生電路原理圖
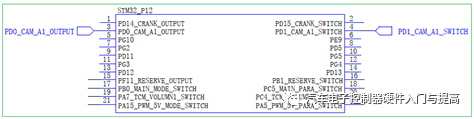
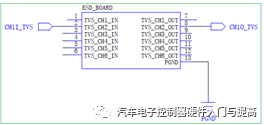
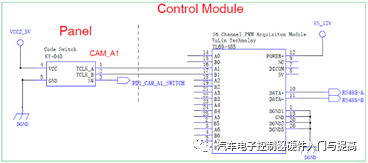
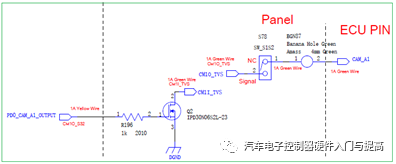
圖4:相位發生電路原理圖
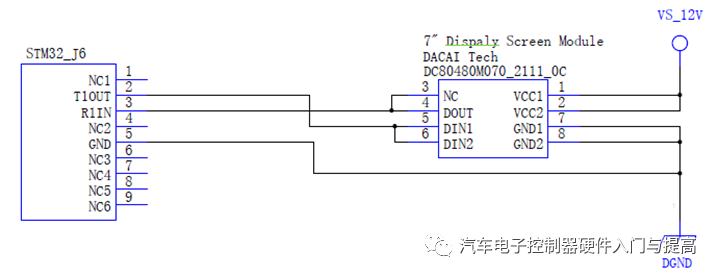
圖5:顯示屏幕電路原理圖
1.1 旋變編碼器
選擇市面常用的KY-040旋變編碼器(如圖2),有5個功能針腳,分別位CLK(時鐘)、DT(數據)、SW(開關)、+(電源)和GND.其中+,GND分別外接電源5V和GND即可。SW一般按下電壓為低電平,CLK與DT實現旋變編碼功能。

圖6:KY-040旋變編碼器
1.2 旋變解碼器
本文選擇深圳市俞霖科技的YL69-485(8通道解碼器)來實現,如圖6:
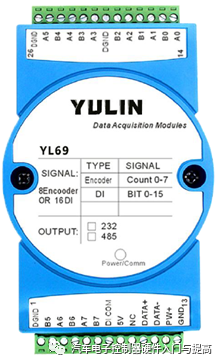
圖7:YL69-485
YL69-485初始設定如下
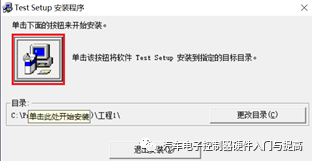
1)獲取廠家的上位機軟件【TEST安裝文件setup.exe】,點擊【確定】

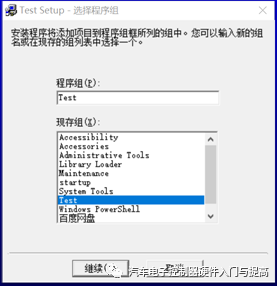
2)點擊【開始安裝】,點擊【確定】、【繼續】
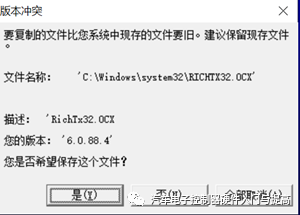
3)跳出的對話框全部選擇【是】,最后點擊【確定】
4)硬件設置,開關打到【初始化init】后下斷電后再上電。
注:每次重新設地址都需重新上下電

5)打開【Test.exe]程序
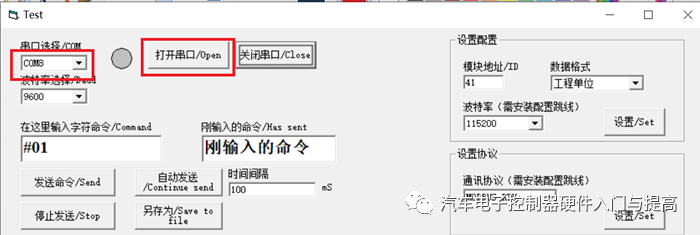
6)選擇設備所在的端口, 波特率設置為9600點擊【打開串口/Open】
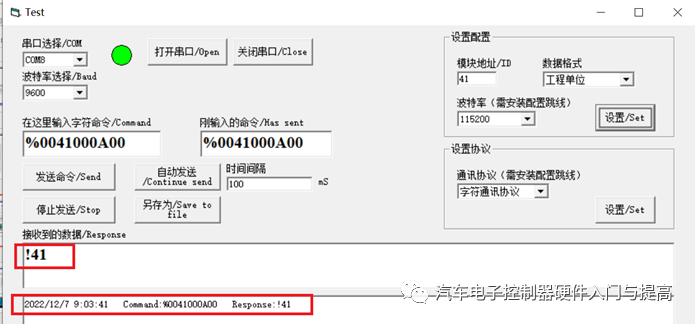
7)模塊地址/ID】更改為目標地址,【波特率】設置位115200,點擊【設置/Set]
注:打開串口后燈由灰色變成綠色,表示連接成功
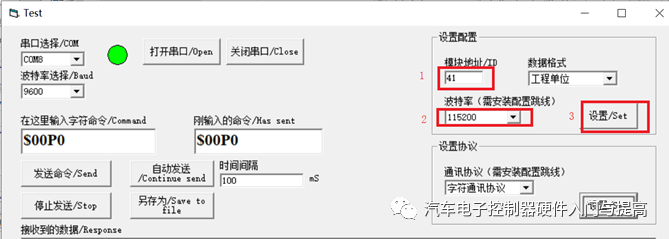
8)如Response有值反饋,表示設置成功。如Response無反饋,表示不成功,可重新上下電重復⑥⑦
9)地址設置成功后,開關撥到【正常】,重新上下電

10)設置編碼器工作模式為0(具體說明參照YL69說明書)
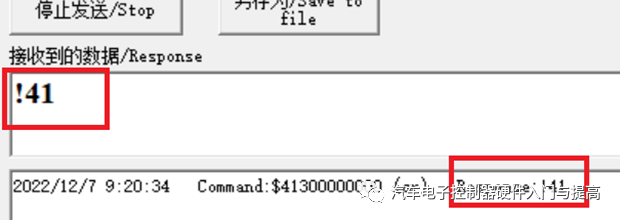
依次選擇【串口選擇】、【波特率選擇】設置為1152000,【打開串口】、【在這里輸入字符命令】填入 $41300000000(cr),然后單擊【發送命令】
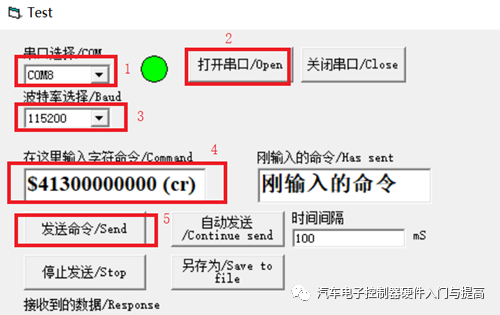
Response有應答表示設置成功,重新上下電
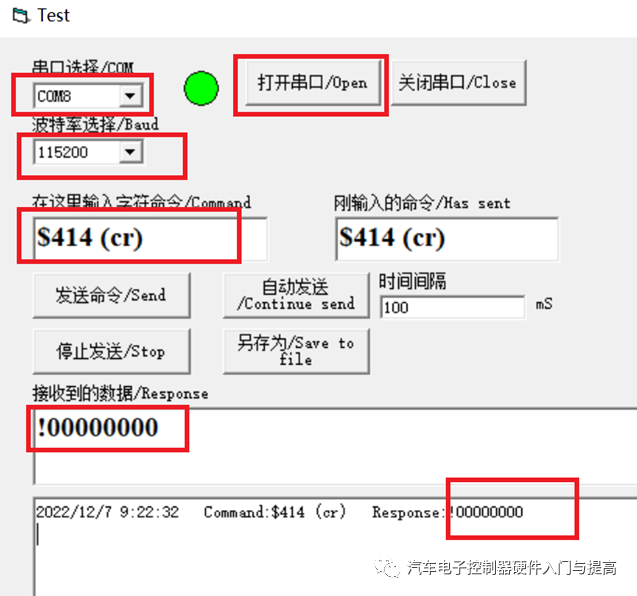
11)依次選擇【串口選擇】、【打開串口】、【在這里輸入字符命令】填入 $414 (cr),然后單擊【發送命令】
Response反饋!00000000表示工作模式0設置成功
審核編輯:陳陳
-
發動機
+關注
關注
33文章
2474瀏覽量
69313 -
發生器
+關注
關注
4文章
1368瀏覽量
61695 -
STM32F407
+關注
關注
15文章
187瀏覽量
29455
原文標題:基于STM32F407主控芯片的發動機轉速/相位發生器設計方法之一
文章出處:【微信號:汽車電子控制器硬件入門與提高,微信公眾號:汽車電子控制器硬件入門與提高】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
國產優秀替代_APM32F407替代STM32F407記錄
多功能發動機轉速模擬器系統總體方案設計
模擬發動機的轉速信號設計方案
多功能發動機轉速模擬器設計有什么優點
多功能發動機轉速模擬器有什么優點?
多功能發動機轉速模擬器系統的工作原理是什么?
STM32F407芯片介紹

STM32F407入門開發: 串口配置





 工商網監
工商網監
評論