

作者:Colm Slattery and Mick McCarthy
在電子工業(yè)中,測量具有寬動態(tài)范圍的信號的需求非常普遍,但當(dāng)前的技術(shù)通常難以滿足實際的系統(tǒng)要求。稱重系統(tǒng)通常使用稱重傳感器橋式傳感器,其最大滿量程輸出為1 mV至2 mV。此類系統(tǒng)可能需要1,000,000:1的分辨率,當(dāng)以2 mV輸入為參考時,需要高性能、低噪聲、高增益放大器和Σ-?調(diào)制器。同樣,醫(yī)療應(yīng)用的化學(xué)和血液分析通常使用光電二極管傳感器,產(chǎn)生非常小的電流,需要精確測量(見圖1)。通常使用低噪聲跨阻放大器,具有多級增益和后處理。
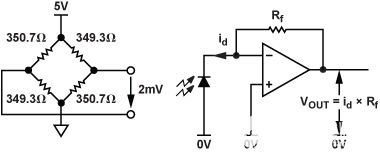
圖1.稱重傳感器和光電二極管應(yīng)用的輸入。
雖然實際傳感器數(shù)據(jù)通常只占輸入信號范圍的一小部分,但系統(tǒng)通常必須設(shè)計為處理故障條件。因此,寬動態(tài)范圍、小輸入的高性能以及對快速變化信號的快速響應(yīng)是關(guān)鍵要求。一些應(yīng)用,如振動監(jiān)測系統(tǒng),同時包含交流和直流信息,因此精確監(jiān)測小信號和大信號的能力變得越來越重要。
這些要求要求靈活的信號調(diào)理模塊具有低噪聲輸入、相對較高的增益,并且能夠在不影響性能的情況下動態(tài)改變增益以響應(yīng)輸入電平變化,同時仍保持寬動態(tài)范圍。現(xiàn)有的Σ-?技術(shù)可以提供許多應(yīng)用所需的動態(tài)范圍,但代價是更新速率。本文介紹一種替代方法,該方法使用高速逐次逼近采樣ADC,并結(jié)合自動量程可編程增益放大器(PGA)前端。增益根據(jù)模擬輸入值自動變化,它使用過采樣將系統(tǒng)的動態(tài)范圍增加到126 dB以上。
在ADC應(yīng)用中,動態(tài)范圍是滿量程均方根值與均方根噪聲之比,通常在模擬輸入短路時測量。通常以分貝表示(dBV = 20 × log10電壓比),它表示ADC可以解析的信號幅度范圍;動態(tài)范圍為60 dB的ADC可以分辨1000:1范圍的信號幅度。對于N位ADC,動態(tài)范圍(DR)的計算公式為:
DR = 6.021N + 1.763 dB
Σ-?ADC(如AD7767)通過將Σ-?調(diào)制器與數(shù)字后置處理器相結(jié)合,可實現(xiàn)出色的動態(tài)范圍。轉(zhuǎn)換器之后的數(shù)字濾波可消除帶外量化噪聲,但也降低了fMCLK,在過濾器的輸入處,到fMCLK/8,fMCLK/16,或fMCLK/32,在數(shù)字輸出端 — 取決于所使用的設(shè)備型號。為了增加動態(tài)范圍,可以添加低噪聲PGA來調(diào)節(jié)輸入信號以達到滿量程。系統(tǒng)的本底噪聲將主要由前端PGA的輸入噪聲主導(dǎo),具體取決于增益設(shè)置。如果信號太大,則會超出ADC輸入的量程。如果信號太小,它會在轉(zhuǎn)換器的量化噪聲中丟失。Σ-?ADC通常用于需要較低系統(tǒng)更新速率的應(yīng)用。
過采樣逐次逼近型ADC,改善動態(tài)范圍
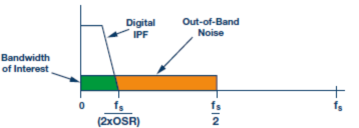
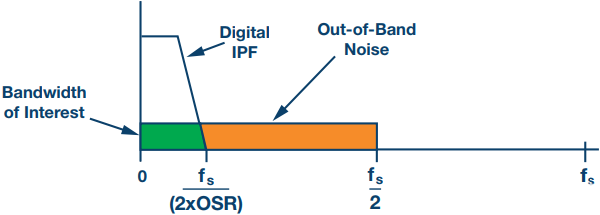
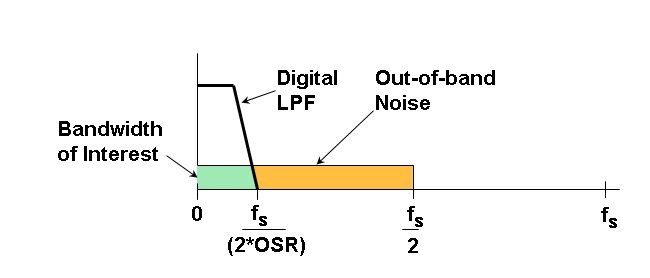
增加逐次逼近型ADC動態(tài)范圍的一種方法是實現(xiàn)過采樣:以遠(yuǎn)高于奈奎斯特頻率的速率對輸入信號進行采樣的過程。一般來說,采樣頻率每增加一倍,噪聲性能就會提高約3 dB(見圖2)。過采樣可以使用后處理技術(shù)以數(shù)字方式實現(xiàn)。AD7606等部分ADC具有可編程過采樣速率,使最終用戶能夠選擇合適的過采樣比。
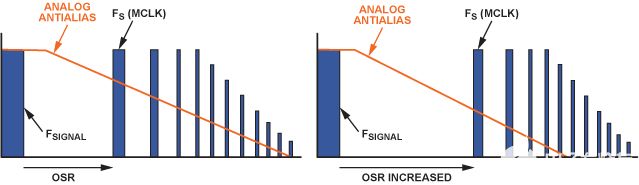
圖2.過采樣可降低噪聲。
將 PGA 功能與過采樣相結(jié)合
為了實現(xiàn)最大動態(tài)范圍,可以添加前端PGA級,以提高非常小信號輸入的有效信噪比(SNR)。考慮>126 dB的系統(tǒng)動態(tài)范圍要求。首先,計算最小均方根噪聲以實現(xiàn)此動態(tài)范圍。例如,3 V輸入范圍(6 V p-p)的滿量程均方根值為2.12 V(6/2√2)。最大允許系統(tǒng)噪聲計算公式為
126 dB = 20 對數(shù)(2.12 V/rms 噪聲))
因此,均方根噪聲≈1 μV rms。
現(xiàn)在,考慮系統(tǒng)更新速率,它將確定過采樣率和最大噪聲量,參考輸入(RTI),這是系統(tǒng)中可以容忍的。例如,當(dāng)AD7985 16位、2.5 MSPS PulSAR ADC以600 kSPS(11 mW耗散)和72的過采樣比運行時,輸入信號的帶寬限制為約4 kHz。總均方根噪聲只是噪聲密度(ND)乘以√f),因此最大允許輸入頻譜噪聲密度(ND)可以計算為:?
1 μV rms = ND × √4 kHz
或者,ND = 15.5 nV/√Hz
根據(jù)RTI系統(tǒng)輸入噪聲的品質(zhì)因數(shù),可以選擇合適的儀表放大器,該儀表放大器將提供足夠的模擬前端增益(與ADC的SNR相加時,并伴有相關(guān)的過采樣),以實現(xiàn)所需的126 dB。對于AD7985,典型SNR值為89 dB,過采樣72可再提高~18 dB(72約為26,每加倍增加 3 dB)。實現(xiàn)126 dB DR仍需要20 dB以上的改進,這可來自模擬PGA級提供的增益。儀表放大器必須提供≥20的增益(或不超過15.5 nV/√Hz噪聲密度規(guī)格)。AD8253是一款10 MHz、20 V/μs、G = 1、10、100、1000 iCMOS可編程增益儀表放大器,是一款不錯的產(chǎn)品;它具有一個低噪聲、10 nV/√Hz輸入級,增益為100,適用于所需帶寬,如圖3所示。?
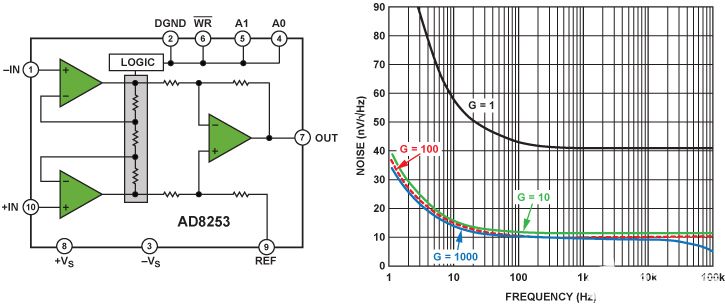
圖3.AD8253儀表放大器:框圖和噪聲頻譜密度。
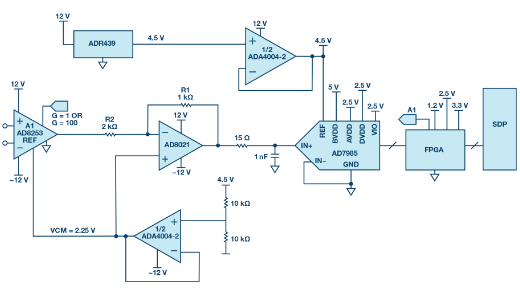
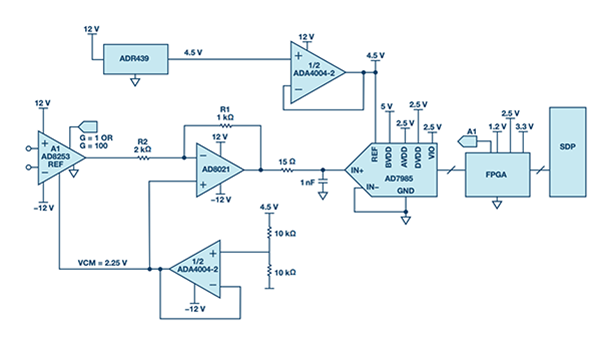
實現(xiàn)前端PGA增益和ADC過采樣的系統(tǒng)級解決方案如圖4所示。AD8021是一款2.1 nV/√Hz低噪聲、高速放大器,能夠驅(qū)動AD7985。它還對AD8253輸出進行失調(diào)和衰減。AD8253和AD8021均采用外部共模偏置電壓工作,這些電壓結(jié)合在一起可在ADC輸入端保持相同的共模電壓。
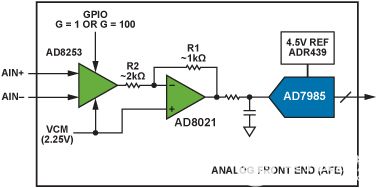
圖4.低噪聲寬帶模擬前端。
由于整個系統(tǒng)的噪聲預(yù)算最大為15 nV/√Hz(參考輸入(RTI),因此計算每個模塊的主要噪聲源以確保不超過15 nV/√Hz硬限值非常有用。AD8021折合到輸入端的噪聲規(guī)格為<3 nV/√Hz,當(dāng)折合到增益為100 AD8253級的輸入端時,可以忽略不計。AD7985的額定SNR為89 dB,采用外部4.5 V基準(zhǔn)電壓源,噪聲分辨率為<45 μV rms。考慮到ADC的奈奎斯特帶寬為300 kHz,它將在該帶寬上貢獻~83 nV/√Hz。當(dāng)參考AD7985的輸入時,其<1 nV/√Hz在系統(tǒng)中可以忽略不計,其中RTI噪聲源使用平方和根計算求和。
使用AD8253的另一個好處是它具有數(shù)字增益控制功能,允許系統(tǒng)增益根據(jù)輸入變化動態(tài)變化。這是利用系統(tǒng)的數(shù)字信號處理能力智能實現(xiàn)的。
本應(yīng)用中數(shù)字處理的主要功能是利用AD7985 16位轉(zhuǎn)換結(jié)果產(chǎn)生更高分辨率的輸出。這是通過抽取數(shù)據(jù)并根據(jù)輸入幅度自動切換模擬輸入增益來實現(xiàn)的。這種過采樣導(dǎo)致輸出數(shù)據(jù)速率低于ADC采樣速率,但動態(tài)范圍大大增加。
為了對該應(yīng)用的數(shù)字端進行原型設(shè)計,使用了現(xiàn)場可編程門陣列(FPGA)作為數(shù)字內(nèi)核。為了快速調(diào)試系統(tǒng),模擬電路和FPGA被整合到一個電路板中,如圖5所示,使用系統(tǒng)演示平臺(SDP)連接器標(biāo)準(zhǔn),允許USB輕松連接到PC。SDP 是可重復(fù)使用的硬件和軟件的組合,允許通過最常用的組件接口輕松控制和捕獲硬件。
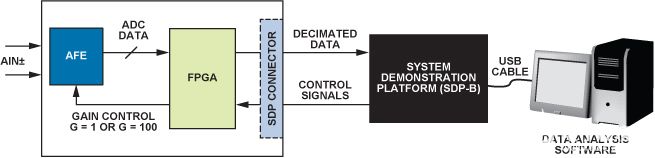
圖5.在具有 FPGA、SDP 和 PC 的系統(tǒng)中使用模擬前端 (AFE)。
基本控制流程如下:
上電后,執(zhí)行零點校準(zhǔn)操作。AD8253的差分模擬輸入短路至地,AD7985在每個增益設(shè)置下執(zhí)行轉(zhuǎn)換。ADC 值被存儲起來供以后使用。
校準(zhǔn)后,F(xiàn)PGA以預(yù)設(shè)速率向AD7985提供周期性轉(zhuǎn)換啟動信號,在本例中約為600 kSPS。每個ADC結(jié)果被讀入FPGA,并傳遞到抽取和增益模塊。
增益模塊查看當(dāng)前ADC結(jié)果、上一個ADC結(jié)果和電流增益設(shè)置,并確定下一個ADC轉(zhuǎn)換最合適的增益設(shè)置。此過程詳述如下。
抽取模塊接收每個ADC樣本、該樣本的當(dāng)前PGA增益設(shè)置以及過程早期存儲的校準(zhǔn)值。收到72個ADC樣本后,23位輸出結(jié)果是72個樣本的平均值,并考慮了失調(diào)和增益。
然后將此23位結(jié)果轉(zhuǎn)換為二進制補碼,并以與Blackfin串行端口(SPORT)兼容的格式從FPGA接收,并由SDP-B硬件捕獲。然后每72個ADC采樣后用一個新詞重復(fù)該過程。
FPGA中實現(xiàn)的兩個關(guān)鍵模塊是抽取器和增益計算器。以下是每個塊的詳細(xì)說明。
抽取器
此塊具有管理一些順序數(shù)據(jù)處理步驟的內(nèi)部狀態(tài)機:
每個單獨的AD7985樣本都?xì)w一化為相同的尺度。例如:AD7985的4 mV輸入,采用4.5 V基準(zhǔn)電壓源時,給出一個代碼(4 mV/4.5 V × 65535)= 58,G = 1。G = 100時,ADC在輸入端看到400 mV,輸出代碼為5825。對于模擬前端(AFE)增益為1的ADC樣本,當(dāng)AFE增益為100時,必須將樣本乘以100以抵消縮放效應(yīng)。這可確保無論AFE增益設(shè)置如何,都可以正確平均和抽取這些樣本。
使用抽取器功能后,可以對模擬輸入進行初始測試。
輸入短路后,可以在高增益直流模式下測試系統(tǒng)(見圖6)。

圖6.輸入短路時進行系統(tǒng)高增益直流模式噪聲測試。
結(jié)果表明,峰峰值噪聲為6位,均方根噪聲為0.84 LSB @ 16位 = 0.654 μV rms。對于2.12 V rms滿量程范圍,動態(tài)范圍可計算為
DR = 20 日志10(滿量程/均方根噪聲)= ~130 dB
因此,系統(tǒng)可以輕松滿足有關(guān)噪聲的動態(tài)范圍目標(biāo)。使用50 mV p-p交流模擬輸入進行測試時,在頻域中觀察到明顯的失真(見圖7)。此特定輸入幅度突出了系統(tǒng)最壞情況 - 當(dāng)交流輸入幅度略大于增益 = 100 模式處理的范圍時,系統(tǒng)定期在兩種模式之間切換。增益門限的選擇也會加劇這種范圍切換效應(yīng),如下所述。每種增益模式下失調(diào)之間的不匹配將顯示為粗諧波失真,因為計算出的輸出代碼會跳轉(zhuǎn)每個范圍內(nèi)失調(diào)之間的差值。
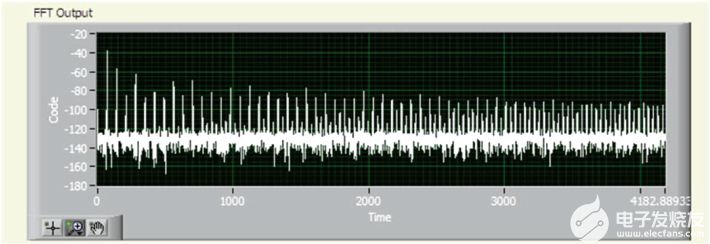
圖7.最差情況下的輸入幅度,無需校準(zhǔn)。
簡單地校準(zhǔn)每個增益范圍內(nèi)的零點偏移可以顯著減少信號失真。事實上,僅校準(zhǔn)就可以將諧波降低約50 dB,如圖8所示。即使是最壞情況下的輸入音,諧波也已降至–110 dB FS電平。
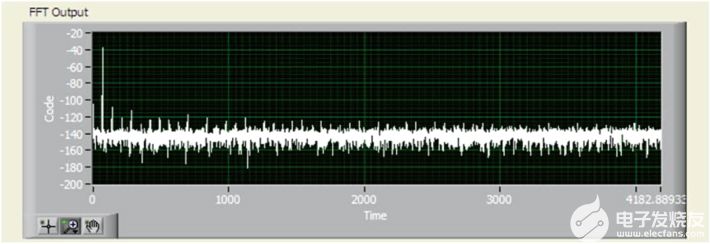
圖8.帶校準(zhǔn)的最差情況輸入幅度。
校準(zhǔn)后的偏移從歸一化樣品中去除。由于校準(zhǔn)是在兩種增益設(shè)置下執(zhí)行的,因此去除的失調(diào)取決于獲取ADC采樣時的增益。
歸一化和失調(diào)校正的樣本被添加到累加器寄存器中,該寄存器在上電時復(fù)位,每次接收到72個樣本時。當(dāng)收到 72 個樣本并將其添加到累加器時,總和將傳遞到除法器,除法器將累加器中的值除以 72 以產(chǎn)生 23 位平均結(jié)果。設(shè)置輸出標(biāo)志以指示除法已完成并且新結(jié)果已準(zhǔn)備就緒。
增益設(shè)置
該模塊根據(jù)電流增益設(shè)置、兩個原始ADC樣本和一些硬編碼閾值數(shù)字輸出新的增益設(shè)置。系統(tǒng)中使用四個閾值;選擇這些閾值對于最大化系統(tǒng)的模擬輸入范圍至關(guān)重要,確保G = 100模式用于盡可能多的信號范圍,同時防止ADC輸入超量程。請注意,此增益模塊作用于每個原始ADC結(jié)果,而不是已歸一化的數(shù)據(jù)。考慮到這一點,可以在這樣的系統(tǒng)中使用的一些閾值的說明性示例(假設(shè)中間量程為零的雙極系統(tǒng))如下:
T1(正下限閾值):+162(中量程以上 162 個代碼) T2(負(fù)下限閾值):–162(低于中量程 162 個代碼) T3(正上限閾值):+32,507(低于正滿量程 260 個代碼) T4(負(fù)上限閾值):–32,508(負(fù)滿量程以上 260 個代碼)
在 G = 1 模式下,使用內(nèi)部極限 T1 和 T2。當(dāng)實際ADC結(jié)果介于T1和T2之間時,增益切換為G = 100模式。這可確保ADC接收的模擬輸入電壓盡快最大化。
在G = 100模式下,使用外部極限T3和T4。如果預(yù)測ADC結(jié)果高于T3或低于T4,則增益切換到G = 1模式,以防止ADC輸入超量程(見圖9)。
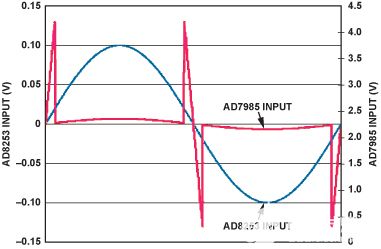
圖9.當(dāng)預(yù)測ADC輸入超出閾值限值時,從放大器輸入到轉(zhuǎn)換器輸入的增益降低100。(藍(lán)線:放大器輸入;紅線:轉(zhuǎn)換器輸入。
在G = 100模式下,如果算法預(yù)測下一個ADC樣本將剛好超出外部閾值(使用非常基本的線性預(yù)測),給出+32,510的ADC結(jié)果,則增益切換到G = 1,而不是+32,510,下一個ADC結(jié)果是+325。
在這樣的系統(tǒng)中,為了防止顫振(在閾值附近快速重復(fù)增益切換),遲滯(100:1和1至100開關(guān)電平的分離)對于確定正確的閾值限值非常重要。在本例中使用的實際限值的計算中,內(nèi)置了顯著的滯后。如果系統(tǒng)從高增益(G = 100)模式切換到低增益(G = 1)模式,系統(tǒng)的模擬輸入電壓必須降低近50%才能恢復(fù)到高增益模式。
全系統(tǒng)性能
借助完全優(yōu)化的增益和抽取算法,整個系統(tǒng)已準(zhǔn)備就緒,可以進行測試。圖10顯示了系統(tǒng)對以1 kHz運行的–0.5 dBFS大信號輸入音的響應(yīng)。當(dāng)考慮到100的PGA增益時,實現(xiàn)的動態(tài)范圍為127 dB。
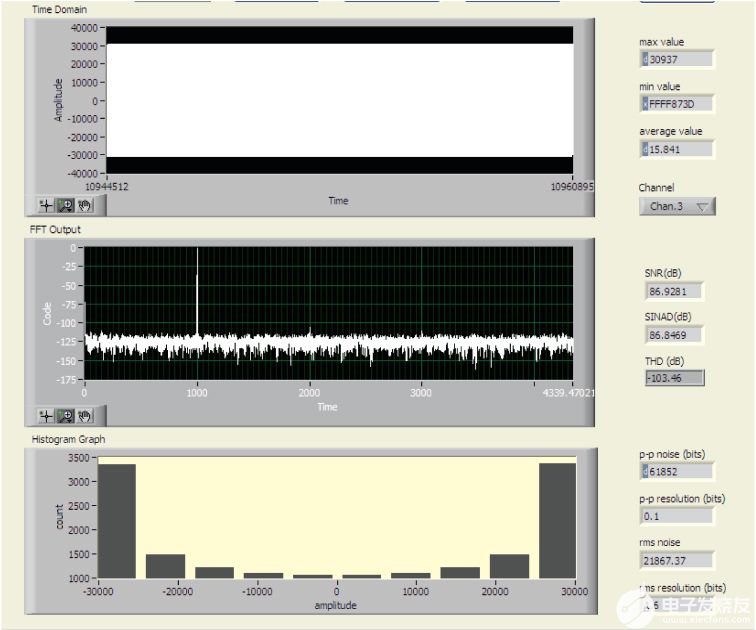
圖 10.對大規(guī)模 1kHz 信號的響應(yīng)。
同樣,在圖11中測試小信號輸入時,在–46.5 dBFS時輸入音為70 Hz,可實現(xiàn)高達129 dB的動態(tài)范圍。在較小的輸入音調(diào)下,性能有望得到改善,因為在此測量期間不會發(fā)生增益范圍的有源切換。
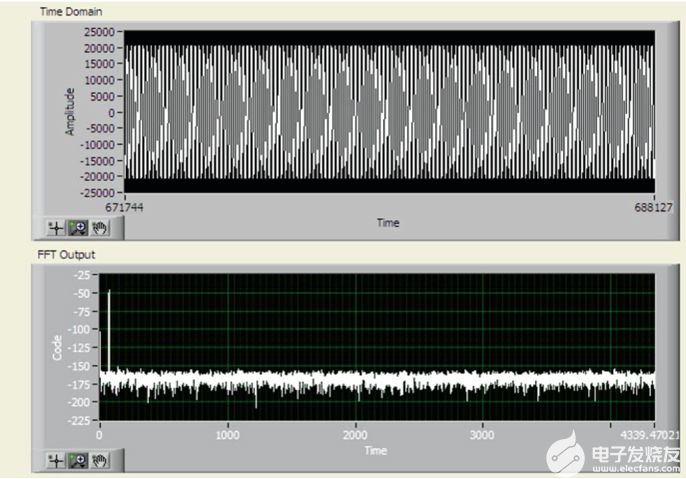
圖 11.對 70 Hz 時的小量程輸入信號的響應(yīng)。
結(jié)論
系統(tǒng)的性能依賴于動態(tài)切換增益以處理小信號和大信號輸入的能力。雖然∑-?技術(shù)提供了出色的動態(tài)范圍,但基于SAR的解決方案提供了一種根據(jù)輸入信號動態(tài)改變前端增益的方法,而不會影響系統(tǒng)性能。這允許實時測量小信號和大信號交流和直流輸入,而無需等待系統(tǒng)建立時間或由于延遲增益變化而產(chǎn)生大毛刺。
該系統(tǒng)的關(guān)鍵是ADC過采樣技術(shù)與預(yù)測增益設(shè)置算法相結(jié)合。增益算法的關(guān)鍵是如何處理輸入信號的壓擺率。對于更高的輸入壓擺率,可能需要自定義增益設(shè)置,以便更快地響應(yīng)接近ADC輸入可能超量程電平的信號。這可以通過收緊所使用的閾值或使用多個樣本而不是本例中描述的兩個樣本對輸入信號進行更復(fù)雜的預(yù)測分析來實現(xiàn)。相反,在輸入壓擺率非常低的系統(tǒng)中,可以加寬門限,以更好地利用高增益模式,而不會使ADC輸入過量程。
雖然本文介紹AD7985 ADC,但所使用的技術(shù)也適用于ADI公司的其他高速轉(zhuǎn)換器。使用更快的ADC采樣速率,最終用戶可以用增加的輸入帶寬和更快的輸出數(shù)據(jù)速率換取更高的過采樣率,從而實現(xiàn)更大的動態(tài)范圍。
利用AD8253 VGA的額外增益范圍,而不僅僅是G = 1和G = 100,可以進一步將增益變化的影響降至最低。在本例中,切換增益時會引入少量失真。但是,如果使用G = 10范圍,對于帶有額外校準(zhǔn)點的三步增益,可以實現(xiàn)更好的系統(tǒng)THD規(guī)格。
-
放大器
+關(guān)注
關(guān)注
145文章
13968瀏覽量
215432 -
adc
+關(guān)注
關(guān)注
99文章
6599瀏覽量
547479 -
pga
+關(guān)注
關(guān)注
1文章
101瀏覽量
41804
發(fā)布評論請先 登錄
相關(guān)推薦
重新定義性能的ADC集成式容性PGA
如何采用PGA的SAR轉(zhuǎn)換器可實現(xiàn)125 dB的動態(tài)范圍
基于Kinetis K系列16位ADC PGA的分析與應(yīng)用

如何采用SAR轉(zhuǎn)換器實現(xiàn)125dB的動態(tài)范圍
采用Δ-Σ和SAR ADC的過采樣模式提升ADC動態(tài)范圍
16位SAR轉(zhuǎn)換器應(yīng)用能否在600 kSPS時達到125 dB的動態(tài)范圍
采用PGA的SAR轉(zhuǎn)換器可實現(xiàn)125 dB的動態(tài)范圍
CN0260 采用PGA的過采樣SAR ADC,可實現(xiàn)125 dB以上的動態(tài)范圍

使用過采樣增加SAR ADC的動態(tài)范圍
用于高動態(tài)范圍的ADC,逐次逼近還是Σ-Δ
過采樣ADC,實現(xiàn)16位分辨率





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論