") 工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)
工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)
工業(yè)運(yùn)動(dòng)控制涵蓋了廣泛的應(yīng)用,從基于逆變器的風(fēng)扇或泵控制,到具有更復(fù)雜的交流驅(qū)動(dòng)控制的工廠自動(dòng)化,再到具有復(fù)雜伺服控制的機(jī)器人等高級(jí)自動(dòng)化應(yīng)用。這些系統(tǒng)需要對(duì)許多變量進(jìn)行檢測(cè)和反饋,例如電機(jī)繞組電流或電壓、直流母線電流或電壓、轉(zhuǎn)子位置和速度。變量的選擇和所需的測(cè)量精度取決于最終應(yīng)用需求、系統(tǒng)架構(gòu)、目標(biāo)系統(tǒng)成本或系統(tǒng)復(fù)雜性,以及其他考慮因素,例如狀態(tài)監(jiān)測(cè)等增值功能。據(jù)報(bào)道,電機(jī)消耗了全球40%的能源,國(guó)際法規(guī)增加了對(duì)整個(gè)工業(yè)運(yùn)動(dòng)應(yīng)用的系統(tǒng)效率的關(guān)注,增加了這些變量的重要性,尤其是電流和電壓。
本文重點(diǎn)介紹根據(jù)電機(jī)額定功率、系統(tǒng)性能要求和最終應(yīng)用,在各種電機(jī)控制信號(hào)鏈拓?fù)渲羞M(jìn)行電流和電壓檢測(cè)。在這種情況下,電機(jī)控制信號(hào)鏈的實(shí)現(xiàn)因傳感器選擇、電流隔離要求、模數(shù)轉(zhuǎn)換器(ADC)選擇、系統(tǒng)集成以及系統(tǒng)電源和接地分區(qū)而異。
工業(yè)驅(qū)動(dòng)應(yīng)用范圍
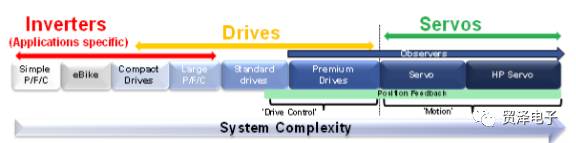
電機(jī)控制應(yīng)用的范圍從簡(jiǎn)單的逆變器到復(fù)雜的伺服驅(qū)動(dòng)器,但都包括具有功率級(jí)的電機(jī)控制系統(tǒng),以及驅(qū)動(dòng)具有不同檢測(cè)和反饋水平的脈寬調(diào)制器(PWM)模塊的處理器。應(yīng)用范圍的簡(jiǎn)化視圖如圖1所示,說明了隨著從左到右移動(dòng)而變得越來越復(fù)雜的系統(tǒng),從泵、風(fēng)扇和壓縮機(jī)等簡(jiǎn)單的控制系統(tǒng)到無需精確反饋即可實(shí)現(xiàn)的系統(tǒng),只需使用簡(jiǎn)單的微處理器。隨著系統(tǒng)復(fù)雜性的增加,向頻譜的高端發(fā)展,復(fù)雜的控制系統(tǒng)需要精確的反饋和快速的通信接口。例如感應(yīng)電機(jī)或永磁電機(jī)的有傳感器或無傳感器矢量控制,以及專為提高效率而設(shè)計(jì)的高功率工業(yè)驅(qū)動(dòng)器——如圖 1 所示為大型泵、風(fēng)扇和壓縮機(jī)。在頻譜的最高端,復(fù)雜的伺服驅(qū)動(dòng)器用于機(jī)器人、機(jī)床和拾取和放置機(jī)器等應(yīng)用。隨著系統(tǒng)變得更加復(fù)雜,變量的傳感和反饋?zhàn)兊酶又匾?/p>
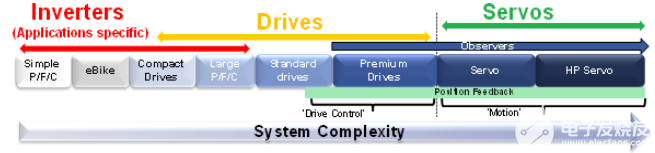
圖1.工業(yè)驅(qū)動(dòng)應(yīng)用范圍。
驅(qū)動(dòng)器體系結(jié)構(gòu) — 系統(tǒng)分區(qū)
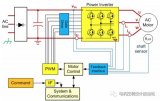
設(shè)計(jì)系統(tǒng)以應(yīng)對(duì)工業(yè)運(yùn)動(dòng)控制領(lǐng)域的各種應(yīng)用存在許多挑戰(zhàn)。通用電機(jī)控制信號(hào)鏈如圖2所示。
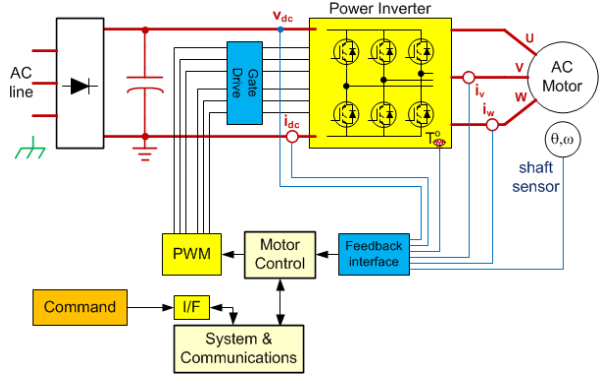
圖2.通用電機(jī)控制信號(hào)鏈。
關(guān)鍵問題是隔離要求,這些要求通常會(huì)對(duì)最終的電路拓?fù)浜图軜?gòu)產(chǎn)生重大影響。有兩個(gè)關(guān)鍵因素需要考慮:為什么隔離和在哪里隔離。
所需的隔離分類將由前者決定。要求可以是高壓安全隔離(SELV)以防止人為電擊,或功能隔離以在非致命電壓之間進(jìn)行電平轉(zhuǎn)換,或用于數(shù)據(jù)完整性和噪聲緩解目的的隔離。隔離位置通常由預(yù)期的系統(tǒng)性能決定。電機(jī)控制通常是一個(gè)惡劣的電氣噪聲環(huán)境,設(shè)計(jì)通常會(huì)遇到幾百伏的大共模電壓,可能以超過20 kHz的頻率切換,瞬態(tài)dv/dt上升時(shí)間非常高。出于這個(gè)原因,無論是高性能系統(tǒng)還是高功率固有噪聲較大的系統(tǒng),通常都會(huì)將功率級(jí)與控制級(jí)隔離。設(shè)計(jì)采用單處理器還是雙處理器方法也會(huì)影響隔離位置。在性能較低且功耗較低的系統(tǒng)中,通常在數(shù)字通信接口處隔離,這意味著電源和控制級(jí)具有相同的電位。低端系統(tǒng)具有較低帶寬的通信接口進(jìn)行隔離。傳統(tǒng)上,由于傳統(tǒng)隔離技術(shù)所需的高帶寬和局限性,隔離高端系統(tǒng)中的通信接口一直具有挑戰(zhàn)性,但隨著磁隔離CAN和RS-485收發(fā)器產(chǎn)品的出現(xiàn),這種情況正在發(fā)生變化,例如 www.analog.com/ iCoupler提供的ADI公司的產(chǎn)品。
高性能閉環(huán)電機(jī)控制設(shè)計(jì)中的兩個(gè)關(guān)鍵要素是PWM調(diào)制器輸出和電機(jī)相電流反饋。圖3a和3b說明了需要安全隔離的位置,具體取決于控制級(jí)是與功率級(jí)共享相同的電位,還是以接地為參考。無論哪種情況,都需要隔離高端柵極驅(qū)動(dòng)器和電流檢測(cè)節(jié)點(diǎn),但隔離等級(jí)不同——在圖3a中,只需要對(duì)這些節(jié)點(diǎn)進(jìn)行功能隔離,而在圖3b中,這些節(jié)點(diǎn)的人身安全(即電流)隔離至關(guān)重要。
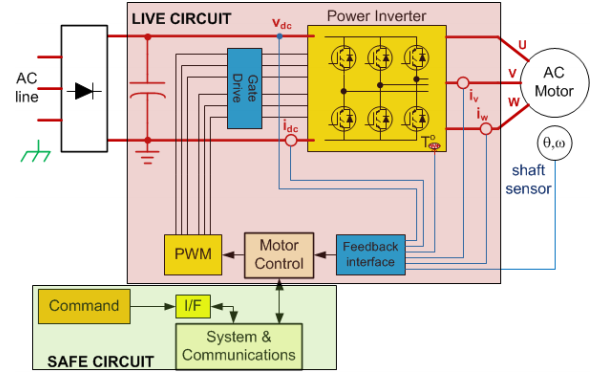
圖 3a. 以功率級(jí)為參考的控制級(jí)。

圖 3b. 以地球?yàn)榛鶞?zhǔn)的控制級(jí)。
電流和電壓檢測(cè)的測(cè)量技術(shù)和拓?fù)?/p>
用于檢測(cè)電流和電壓的信號(hào)鏈實(shí)現(xiàn)因傳感器選擇、電流隔離要求、ADC選擇和系統(tǒng)集成以及系統(tǒng)電源和接地分區(qū)而異,如前所述。實(shí)現(xiàn)高保真測(cè)量的信號(hào)調(diào)理并非易事。例如,在這種嘈雜的環(huán)境中恢復(fù)小信號(hào)或傳輸數(shù)字信號(hào)具有挑戰(zhàn)性,而隔離模擬信號(hào)則更具挑戰(zhàn)性。在許多情況下,信號(hào)隔離電路會(huì)引入相位延遲,從而限制系統(tǒng)動(dòng)態(tài)性能。相電流檢測(cè)尤其具有挑戰(zhàn)性,因?yàn)樵摴?jié)點(diǎn)與功率級(jí)(逆變器模塊)中心內(nèi)的柵極驅(qū)動(dòng)器輸出連接到同一電路節(jié)點(diǎn),因此在隔離電壓和開關(guān)瞬變方面具有相同的要求。確定要在電機(jī)控制系統(tǒng)中實(shí)現(xiàn)的測(cè)量信號(hào)鏈(技術(shù)、信號(hào)調(diào)理和ADC)取決于三個(gè)關(guān)鍵因素:
系統(tǒng)中的點(diǎn)或節(jié)點(diǎn),因?yàn)檫@決定了需要測(cè)量的內(nèi)容。
電機(jī)的功率水平和由此產(chǎn)生的傳感器選擇——是否是固有隔離的。傳感器的選擇對(duì)ADC的選擇有重大影響,包括轉(zhuǎn)換器架構(gòu)、功能和模擬輸入范圍。
最終應(yīng)用程序。這可能會(huì)推動(dòng)檢測(cè)信號(hào)鏈中對(duì)高分辨率、高精度或速度的需求。例如,在較寬的速度范圍內(nèi)實(shí)現(xiàn)無傳感器控制,需要更頻繁地進(jìn)行更多測(cè)量和更高的精度。最終應(yīng)用也會(huì)影響對(duì)ADC功能的需求。例如,多軸控制可能需要更高的通道數(shù)ADC。
電流和電壓傳感器
電機(jī)控制中最常用的電流傳感器是分流電阻器、霍爾效應(yīng) (HE) 傳感器和電流互感器 (CT)。雖然分流電阻器不提供隔離,并且在較高電流下會(huì)產(chǎn)生損耗,但它們是所有傳感器中線性最強(qiáng)的,成本最低,適用于交流和直流測(cè)量。限制分流功率損耗所需的信號(hào)電平降低通常會(huì)將分流應(yīng)用限制在50 A或更低。CT和HE傳感器提供固有的隔離,允許它們服務(wù)于高電流系統(tǒng),但由于傳感器本身的初始精度較差或溫度范圍內(nèi)的精度較差,因此它們的成本更高,并且導(dǎo)致解決方案的精度低于通過分流電阻器可以實(shí)現(xiàn)的解決方案。
電機(jī)電流測(cè)量位置和拓?fù)?/p>
除了傳感器類型之外,還有幾個(gè)電機(jī)電流測(cè)量節(jié)點(diǎn)可供選擇。平均直流母線電流可用于控制目的,但在更高級(jí)的驅(qū)動(dòng)器中,電機(jī)繞組電流用作主要反饋?zhàn)兞俊V苯酉嗬@組電流測(cè)量是理想的選擇,用于高性能系統(tǒng)。但是,可以使用每個(gè)下部逆變器支路中的分流器或直流母線中的單個(gè)分流器間接測(cè)量繞組電流。這些方法的優(yōu)點(diǎn)是分流信號(hào)都以電源共通為基準(zhǔn),但從直流鏈路提取繞組電流需要將采樣同步到PWM開關(guān)。可以使用上述任何電流檢測(cè)技術(shù)進(jìn)行直接相繞組電流測(cè)量,但分流電阻信號(hào)必須隔離。高共模放大器可以提供功能隔離,但人體安全隔離必須由隔離放大器或隔離調(diào)制器提供。
圖4顯示了上述各種電流反饋選項(xiàng)。雖然控制反饋只需要其中一個(gè)選項(xiàng),但直流母線電流信號(hào)可用作保護(hù)的備用信號(hào)。
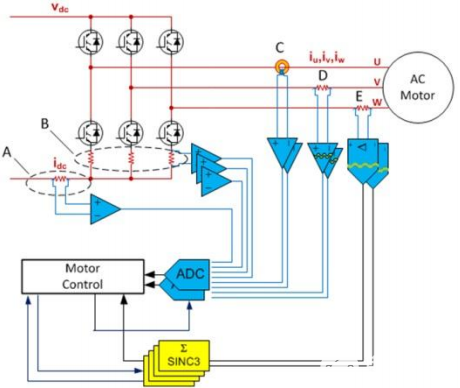
圖4.隔離和非隔離電機(jī)電流反饋。
如前所述,系統(tǒng)電源和接地分區(qū)將確定所需的隔離分類,從而確定哪些反饋選項(xiàng)是合適的。系統(tǒng)目標(biāo)性能也會(huì)影響傳感器的選擇或測(cè)量技術(shù)。有許多配置可以在性能范圍內(nèi)實(shí)現(xiàn)。
性能較低的示例:功率級(jí)和控制級(jí)位于公共電位上,檢測(cè)選項(xiàng) A 或 B
Using leg shunts is one of the most economical techniques to measure motor current. In this example, where the power stage shares the same potential as the control stage, there is no common mode to be dealt with and the outputs from option A or B can connect directly to the signal conditioning circuitry and ADC. This type of topology would generally be found in a low power and low performance system with the ADC embedded in the microprocessor.
Higher Performance Example: Control Stage Connected to Earth, Sensing Option C, D, or E
In this example, human safety isolation is required. Sensing options C, D, and E are all possible. Option E provides the highest quality current feedback of all three options and, being a higher performance system, it is likely that there is an FPGA or other form of processing in the system that can provide the digital filter for the isolated modulator signal. The ADC choice for option C, the isolated sensor (likely closed loop HE), would traditionally be discrete to achieve higher performance than that possible with embedded ADC offerings to date. Option D is an isolated amplifier in this configuration, vs.a common-mode amplifier, as safety isolation is required. An isolated amplifier will limit performance, and so an embedded ADC solution may suffice. This will provide the lowest fidelity current feedback compared to options C or E, and while an embedded ADC may be perceived as “free”and the isolated amplifier potentially “cheap,” the implementation usually requires additional components for offset compensation and level shifting for ADC input range matching, increasing the overall signal chain cost.
There are many topologies that can be used in motor control design to sense motor current with many factors to consider such as cost, power level, and performance level. A key objective for most system designers is to improve the current sense feedback in order to improve efficiency within their cost targets. For higher end applications, current feedback is critical to other system performance measures such as dynamic response, acoustic noise, or torque ripple, not just efficiency. It is evident that there is a continuum of performance running from low to high across the various topologies available and this is coarsely mapped out in Figure 5 illustrating both lower power and higher power options.
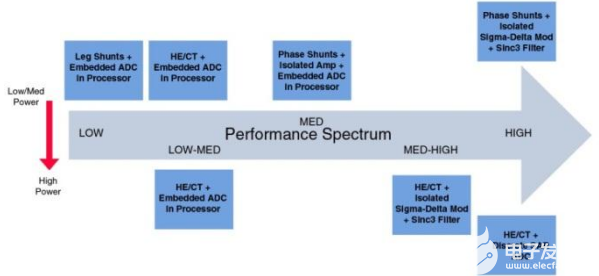
圖5.電流檢測(cè)拓?fù)湫阅芊秶?/strong>
電機(jī)控制系統(tǒng)設(shè)計(jì)人員的目標(biāo)、需求和由此產(chǎn)生的趨勢(shì):從 HE 傳感器遷移到分流電阻器
分流電阻器與隔離式Σ-Δ調(diào)制器耦合,可提供最高質(zhì)量的電流反饋,其中電流水平足夠低,適合分流使用。系統(tǒng)設(shè)計(jì)人員有一個(gè)顯著的趨勢(shì)是從HE傳感器遷移到分流電阻,另一個(gè)趨勢(shì)是轉(zhuǎn)向隔離式調(diào)制器方法,而不是隔離式放大器方法。僅更換傳感器即可降低物料清單 (BOM) 和 PCB 插入成本,并提高傳感器精度。分流電阻器對(duì)磁場(chǎng)或機(jī)械振動(dòng)不敏感。通常,系統(tǒng)設(shè)計(jì)人員用分流電阻代替HE傳感器時(shí),可能會(huì)選擇隔離放大器,并繼續(xù)使用以前在基于HE傳感器的設(shè)計(jì)中使用的ADC來限制信號(hào)鏈的變化水平。但是,如前所述,無論ADC性能如何,隔離放大器的性能都會(huì)受到限制。
進(jìn)一步用隔離式Σ-Δ調(diào)制器代替隔離放大器和ADC將消除性能瓶頸,并大大改善設(shè)計(jì),通常將其從9位至10位質(zhì)量反饋?zhàn)優(yōu)?2位電平。模擬過流保護(hù)(OCP)電路也可以被淘汰,因?yàn)樘幚恙?Δ調(diào)制器輸出所需的數(shù)字濾波器也可以配置為實(shí)現(xiàn)快速OCP環(huán)路。因此,任何BOM分析不僅應(yīng)包括隔離放大器、原始ADC和它們之間的信號(hào)調(diào)理,還應(yīng)包括可能被淘汰的OCP器件。AD7401A隔離式Σ-Δ調(diào)制器基于ADI耦合器技術(shù),差分輸入范圍為±250 mV(通常用于OCP的±320 mV滿量程),非常適合阻性分流測(cè)量。模擬輸入由模擬調(diào)制器連續(xù)采樣,輸入信息以數(shù)據(jù)速率高達(dá)20 MHz的密度包含在數(shù)字輸出流中。原始信息可以用適當(dāng)?shù)臄?shù)字濾波器重建,通常是Sinc。?3用于精密電流測(cè)量的濾波器。由于轉(zhuǎn)換性能可以與帶寬或?yàn)V波器群延遲進(jìn)行權(quán)衡,因此更粗糙、更快的濾波器可以提供2μs量級(jí)的快速響應(yīng)OCP,非常適合IGBT保護(hù)。
要求減小分流電阻器尺寸
從信號(hào)測(cè)量方面來看,分流電阻器選擇存在一些關(guān)鍵挑戰(zhàn),因?yàn)樵陟`敏度和功耗之間需要權(quán)衡。較大的電阻值將確保使用Σ-Δ調(diào)制器的整個(gè)范圍或盡可能多的模擬輸入范圍,從而最大化動(dòng)態(tài)范圍。然而,較大的電阻值也會(huì)導(dǎo)致電壓降和效率降低,因?yàn)?I2電阻的× R損耗。使用較大的電阻器時(shí),通過自熱效應(yīng)實(shí)現(xiàn)非線性也可能是一個(gè)挑戰(zhàn)。因此,系統(tǒng)設(shè)計(jì)人員面臨著權(quán)衡取舍的問題,而選擇能夠?yàn)椴煌娏魉降脑S多型號(hào)和電機(jī)提供服務(wù)的分流器尺寸是常見的需求,這進(jìn)一步加劇了這種情況。面對(duì)可能是電機(jī)額定電流幾倍的峰值電流以及需要可靠地捕獲兩者,保持動(dòng)態(tài)范圍也具有挑戰(zhàn)性。系統(tǒng)開啟時(shí)控制峰值電流的能力因設(shè)計(jì)而異,從嚴(yán)格控制(例如,高于標(biāo)稱值30%)到高達(dá)標(biāo)稱電流的10倍。峰值電流也是由加速度和負(fù)載或扭矩變化引起的。然而,在驅(qū)動(dòng)設(shè)計(jì)中,系統(tǒng)中的峰值電流通常為標(biāo)稱電流的4倍。
面對(duì)這些挑戰(zhàn),系統(tǒng)設(shè)計(jì)人員正在尋找具有更寬動(dòng)態(tài)范圍或改進(jìn)信噪比和失真比(SINAD)的卓越Σ-Δ調(diào)制器。迄今為止,隔離式Σ-Δ調(diào)制器產(chǎn)品已提供16位分辨率和高達(dá)12位有效位數(shù)(ENOB)的保證性能。

隨著在低功耗驅(qū)動(dòng)器中轉(zhuǎn)向使用分流電阻器,電機(jī)驅(qū)動(dòng)器制造商也希望提高驅(qū)動(dòng)器的額定功率,出于性能和成本原因,可以使用這種拓?fù)浣Y(jié)構(gòu)。這只能通過使用小得多的分流電阻來實(shí)現(xiàn),這需要出現(xiàn)更高性能的調(diào)制器內(nèi)核來解析信號(hào)幅度減小的問題。
系統(tǒng)設(shè)計(jì)人員,尤其是伺服設(shè)計(jì)人員,也在不斷尋求通過縮短模數(shù)轉(zhuǎn)換時(shí)間或通過與隔離式Σ-Δ調(diào)制器和分流電阻拓?fù)湎嚓P(guān)的數(shù)字濾波器減少群延遲來改善系統(tǒng)響應(yīng)。如前所述,轉(zhuǎn)換性能可以與帶寬或?yàn)V波器群延遲進(jìn)行權(quán)衡。更粗糙、更快的濾波器可以提供更快的響應(yīng),但以犧牲性能為代價(jià)。系統(tǒng)設(shè)計(jì)人員分析濾波器長(zhǎng)度或抽取率的影響,然后根據(jù)其最終應(yīng)用需求做出權(quán)衡。提高調(diào)制器的時(shí)鐘速率會(huì)有所幫助,但許多設(shè)計(jì)人員已經(jīng)以AD7401A可接受的20 MHz最大時(shí)鐘速率工作。提高時(shí)鐘速率的缺點(diǎn)之一是潛在的輻射和干擾(EMI)效應(yīng)。在相同時(shí)鐘速率下,更高性能的調(diào)制器將改善群延遲與性能的權(quán)衡,從而縮短響應(yīng)時(shí)間,同時(shí)減少對(duì)性能的影響。
業(yè)界性能最高的隔離式Σ-Δ調(diào)制器
很明顯,更高性能的隔離式Σ-Δ調(diào)制器將支持工業(yè)電機(jī)控制設(shè)計(jì)中的多種需求和趨勢(shì),并通過減小分流電阻器尺寸來提高電機(jī)驅(qū)動(dòng)器的功率效率;改進(jìn)的無傳感器控制方案;實(shí)現(xiàn)高效內(nèi)部永磁電機(jī) (IPM) 的控制。ADI公司的AD7403是AD7401A的下一代產(chǎn)品,在20 MHz的相同外部時(shí)鐘速率下提供更寬的動(dòng)態(tài)范圍。這允許更靈活的分流器尺寸選擇,優(yōu)化驅(qū)動(dòng)器與電機(jī)的匹配,改進(jìn)標(biāo)稱電流和峰值電流測(cè)量,減少單個(gè)分流器尺寸對(duì)一系列電機(jī)型號(hào)的影響,并允許在更高電流水平下使用分流電阻代替HE傳感器。通過減少測(cè)量延遲,還可以改善動(dòng)態(tài)響應(yīng)。AD7403還具有更高連續(xù)工作電壓(VIORM),比上一代AD7400A和AD7401A,通過使用更高的直流總線電壓,從而降低電機(jī)電流,也有助于提高系統(tǒng)效率。
更廣泛的系統(tǒng)解決方案,包括ADSP-CM40x混合信號(hào)控制處理器
如前所述,Σ-Δ調(diào)制器的實(shí)現(xiàn)需要在系統(tǒng)中使用數(shù)字濾波器。傳統(tǒng)上,這是通過FPGA或數(shù)字ASIC實(shí)現(xiàn)的。ADSP-CM408F混合信號(hào)控制處理器的問世,該處理器包括硬件Sinc。3AD740x系列隔離式Σ-Δ調(diào)制器可以直接連接的濾波器,可能會(huì)提高電阻分流檢測(cè)技術(shù)與隔離式Σ-Δ調(diào)制器的采用率。如前所述,由于數(shù)字域中的系統(tǒng)復(fù)雜性和相關(guān)(FPGA)成本更高,這種技術(shù)傳統(tǒng)上被認(rèn)為是昂貴的。ADSP-CM408F是一種經(jīng)濟(jì)高效的解決方案,應(yīng)使許多設(shè)計(jì)人員能夠考慮電阻分流檢測(cè),而這些設(shè)計(jì)人員以前受成本目標(biāo)的限制。
審核編輯:郭婷
-
濾波器
+關(guān)注
關(guān)注
161文章
7853瀏覽量
178504 -
電機(jī)控制
+關(guān)注
關(guān)注
3538文章
1888瀏覽量
269030 -
逆變器
+關(guān)注
關(guān)注
286文章
4738瀏覽量
207285
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
適用于工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)

#硬聲創(chuàng)作季 #工業(yè)控制 #PLC 運(yùn)動(dòng)控制如何分類?
適用于工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)
隔離技術(shù)在可靠工業(yè)測(cè)量的應(yīng)用
工業(yè)運(yùn)動(dòng)控制的電流與電壓怎么檢測(cè)?
如何選擇工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)
機(jī)器人運(yùn)動(dòng)控制技術(shù)
求一種工業(yè)運(yùn)動(dòng)控制系統(tǒng)方案
Trinamic運(yùn)動(dòng)控制滿足工業(yè)自動(dòng)化
運(yùn)動(dòng)控制新技術(shù)
基于運(yùn)動(dòng)控制技術(shù)的非球面測(cè)量系統(tǒng)
工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)怎么選?
分享適用于工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)分析介紹
工業(yè)運(yùn)動(dòng)控制的測(cè)量技術(shù)怎么選?這些問題你要弄明白

正運(yùn)動(dòng)技術(shù)自主自研Windows運(yùn)動(dòng)控制實(shí)時(shí)軟核MotionRT7入選“十大工業(yè)技術(shù)創(chuàng)新獎(jiǎng)”





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論