") 精密旋變數(shù)字轉(zhuǎn)換器可測量角位置和速度
精密旋變數(shù)字轉(zhuǎn)換器可測量角位置和速度
作者:Jakub Szymczak、Shane O‘Meara、Johnny Gealon 和 Christopher Nelson De La Rama
旋轉(zhuǎn)變壓器是測量精確角位置的機(jī)電傳感器,作為可變耦合變壓器運(yùn)行,初級(jí)繞組和兩個(gè)次級(jí)繞組之間的磁耦合量根據(jù)旋轉(zhuǎn)元件(轉(zhuǎn)子)的位置而變化,旋轉(zhuǎn)元件通常安裝在電機(jī)軸上。旋轉(zhuǎn)變壓器用于工業(yè)電機(jī)控制、伺服、機(jī)器人、混合動(dòng)力和全電動(dòng)汽車中的動(dòng)力總成單元,以及許多其他需要精確軸旋轉(zhuǎn)的應(yīng)用,可以長時(shí)間承受惡劣條件,使其成為惡劣環(huán)境中軍事系統(tǒng)的完美選擇。
標(biāo)準(zhǔn)旋轉(zhuǎn)變壓器在轉(zhuǎn)子上有一個(gè)初級(jí)繞組,在定子上有兩個(gè)次級(jí)繞組。另一方面,可變磁阻旋轉(zhuǎn)變壓器的轉(zhuǎn)子上沒有繞組。它們的初級(jí)和次級(jí)繞組都在定子上,但轉(zhuǎn)子的顯著性(裸露的極點(diǎn))將次級(jí)繞組的正弦變化與角位置耦合。圖1顯示了經(jīng)典和可變磁阻旋變器。
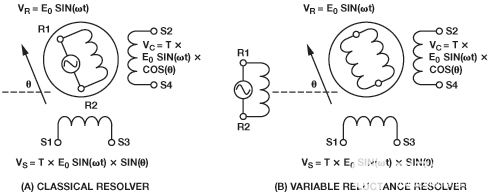
圖1.經(jīng)典旋轉(zhuǎn)變壓器與可變磁阻旋轉(zhuǎn)變壓器。
當(dāng)初級(jí)繞組R1 – R2被正弦信號(hào)激勵(lì)時(shí),如公式1所示,次級(jí)繞組中會(huì)感應(yīng)出一個(gè)信號(hào)。次級(jí)繞組的耦合量是轉(zhuǎn)子相對于定子位置的函數(shù),衰減因子稱為旋轉(zhuǎn)變壓器變換比。由于次級(jí)繞組的機(jī)械位移為90°,因此兩個(gè)輸出正弦信號(hào)相對于彼此相移90°。旋變器輸入和輸出電壓之間的關(guān)系如公式2和公式3所示。等式2為正弦信號(hào);等式3是余弦信號(hào)。
 |
(1) |
 |
(2) |
 |
(3) |
其中:θ為軸角,ω為激勵(lì)信號(hào)頻率,E0是激勵(lì)信號(hào)幅值,T是旋變變換比。
兩個(gè)輸出信號(hào)由軸角的正弦和余弦調(diào)制。激勵(lì)信號(hào)以及正弦和余弦輸出信號(hào)的圖形表示如圖2所示。正弦信號(hào)的最大幅度為 90° 和 270°,余弦信號(hào)的最大幅度為 0° 和 180°。
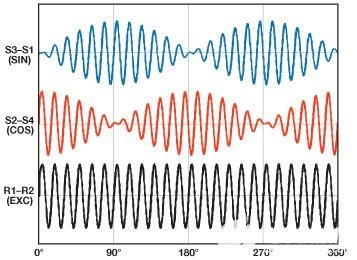
圖2.旋轉(zhuǎn)變壓器電信號(hào)表示。
旋轉(zhuǎn)變壓器傳感器具有一組獨(dú)特的參數(shù),應(yīng)在設(shè)計(jì)階段考慮這些參數(shù)。表1總結(jié)了最關(guān)鍵的電氣參數(shù)和相應(yīng)的典型規(guī)格。
表 1.旋轉(zhuǎn)變壓器關(guān)鍵參數(shù)
|
電氣參數(shù) |
典型范圍 |
單位 |
描述 |
|
輸入電壓 |
3–7 |
V rms |
推薦應(yīng)用于旋變器初級(jí)繞組R1 – R2的激勵(lì)信號(hào)幅度 |
|
輸入頻率 |
50–20,000 |
赫茲 |
推薦應(yīng)用于旋變器初級(jí)繞組R1 – R2的激勵(lì)信號(hào)頻率 |
|
轉(zhuǎn)換率 |
0.2–1.0 |
V/V |
初級(jí)繞組和次級(jí)繞組信號(hào)幅度之比 |
|
輸入阻抗 |
100–500 |
Ω |
旋轉(zhuǎn)變壓器的輸入阻抗 |
|
相移 |
±25 |
度 |
施加在初級(jí)繞組上的激勵(lì)信號(hào) (R1 – R2) 和次級(jí)繞組上的正弦/余弦信號(hào) (S3 – S1、S2 – S4) 之間的相移 |
|
極對 |
1–3 |
每次機(jī)械旋轉(zhuǎn)的電旋轉(zhuǎn)次數(shù) |
旋變數(shù)字轉(zhuǎn)換器
初級(jí)繞組由正弦波參考信號(hào)激勵(lì),兩個(gè)差分輸出信號(hào)正弦和余弦在次級(jí)繞組上電磁感應(yīng)。旋轉(zhuǎn)變壓器數(shù)字轉(zhuǎn)換器(RDC)在旋轉(zhuǎn)變壓器和系統(tǒng)微處理器之間接口,使用這些正弦和余弦信號(hào)來解碼電機(jī)軸的角位置和轉(zhuǎn)速。
大多數(shù) RDC 使用 II 型跟蹤環(huán)路來執(zhí)行位置和速度計(jì)算。II型環(huán)路使用二階濾波器來確保穩(wěn)態(tài)或恒速輸入信號(hào)的穩(wěn)態(tài)誤差為零。RDC同時(shí)對兩個(gè)輸入信號(hào)進(jìn)行采樣,以向跟蹤環(huán)路提供數(shù)字化數(shù)據(jù)。使用此類環(huán)路的RDC的最新示例是ADI公司的10位至16位跟蹤轉(zhuǎn)換器AD2S1210,其片內(nèi)可編程正弦振蕩器為初級(jí)繞組提供激勵(lì)信號(hào)。
如表1所示,典型旋變器需要低阻抗3 V rms至7 V rms信號(hào)來驅(qū)動(dòng)初級(jí)繞組。RDC 采用 5V 電源供電,通常在激勵(lì)輸出端提供 7.2V p-p 差分信號(hào)。該信號(hào)沒有足夠的幅度和驅(qū)動(dòng)能力來滿足旋變器的輸入規(guī)格。此外,旋變器將信號(hào)衰減高達(dá)5×,因此旋變器輸出幅度不符合RDC的輸入幅度要求,如表2所示。
這個(gè)問題的解決方案是使用差分放大器將正弦信號(hào)提升到初級(jí)。該放大器必須能夠驅(qū)動(dòng)低至100 Ω的負(fù)載。一種常見的做法是用大信號(hào)驅(qū)動(dòng)初級(jí),以獲得良好的信噪比。然后,輸出正弦和余弦信號(hào)可以使用電阻分壓器衰減。
在許多工業(yè)和汽車應(yīng)用中,RDC用于嘈雜的環(huán)境,這會(huì)將高頻噪聲引入正弦和余弦線。為了解決這個(gè)問題,在盡可能靠近RDC的地方插入一個(gè)簡單的差分低通濾波器。圖3顯示了一個(gè)典型的旋變數(shù)字轉(zhuǎn)換器接口,包括放大器和濾波器。
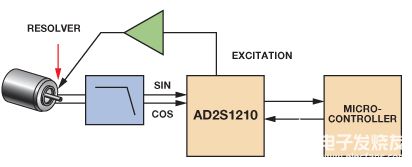
圖3.典型旋轉(zhuǎn)變壓器系統(tǒng)框圖。
操作理論
圖 4 顯示了 RDC 中的操作塊。轉(zhuǎn)換器通過產(chǎn)生輸出角度φ來連續(xù)跟蹤軸角θ,該輸出角度反饋并與輸入角度進(jìn)行比較。當(dāng)轉(zhuǎn)換器跟蹤位置時(shí),兩個(gè)角度之間的誤差最小。
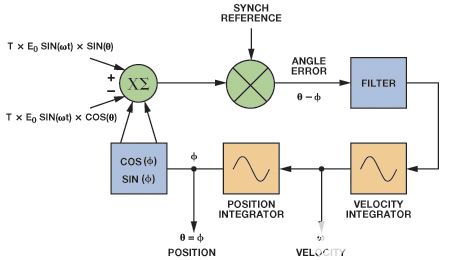
圖4.AD2S1210工作原理框圖
要測量誤差,請將正弦和余弦輸入分別乘以 cos(φ) 和 sin(φ):
 |
(4) |
 |
(5) |
接下來,取兩者之間的區(qū)別:
 |
(6) |
然后,使用內(nèi)部生成的合成參考解調(diào)信號(hào):
 |
(7) |
使用三角恒等式,E0(sin θ cos φ – cos θ sin φ) = E0sin(θ – φ),大約等于E0 ( θ – φ) 表示角度誤差 (θ – φ) 的小值。 E0 (θ – φ)是轉(zhuǎn)子的角度誤差與轉(zhuǎn)換器的數(shù)字角度輸出之間的差值。II型跟蹤環(huán)路使誤差信號(hào)為零。完成此操作后,φ等于旋轉(zhuǎn)變壓器角度 θ。
關(guān)鍵 RDC 參數(shù)
在選擇合適的器件之前,工程師必須考慮用于表征旋變數(shù)字轉(zhuǎn)換器的許多參數(shù)。表2顯示了AD2S1210的關(guān)鍵RDC參數(shù)和規(guī)格,它設(shè)定了同類最佳轉(zhuǎn)換器的界限。
表 2.AD2S1210
的關(guān)鍵RDC參數(shù)和值
|
電氣參數(shù) |
典型范圍 |
單位 |
描述 |
|
輸入電壓 |
2.3–4.0 |
V p-p |
正弦和余弦輸入的差分信號(hào)范圍 |
|
鎖相范圍 |
±44 |
度 |
RDC產(chǎn)生的激勵(lì)信號(hào)與正弦和余弦輸入之間的相移 |
|
角度精度 |
±2.5 |
弧分 |
RDC 的角度精度 |
|
分辨率 |
10, 12, 14, 16 |
位 |
RDC 分辨率 |
|
速度精度 |
2 |
低音水平 |
RDC 提供的速度精度 |
|
跟蹤率 |
3125, 1250, 625, 156 |
RPS |
特定分辨率的跟蹤功能 |
|
建立時(shí)間 |
2.2, 6, 14.7, 66 |
女士 |
轉(zhuǎn)換器在特定分辨率下對 179° 階躍變化的響應(yīng)時(shí)間 |
錯(cuò)誤源
完整系統(tǒng)的精度取決于RDC的精度,以及旋變器、系統(tǒng)架構(gòu)、布線、激勵(lì)緩沖器和正弦/余弦輸入電路的誤差。系統(tǒng)誤差的最常見來源是幅度失配、信號(hào)相移、偏移和加速度。
幅度失配是正弦和余弦信號(hào)處于峰值幅度時(shí)峰峰值幅度的差異,余弦為0°和180°,正弦為90°和270°。失配可能由旋變器繞組的變化或旋變器與RDC的正弦和余弦輸入之間的增益引起。等式 3 可以改寫為
 |
(8) |
其中δ是余弦信號(hào)相對于正弦信號(hào)的幅度失配百分比。靜態(tài)位置誤差ε(以弧度表示)定義為
 |
(9) |
公式9顯示,幅度失配誤差以兩倍的旋轉(zhuǎn)速率振蕩,在45°的奇整數(shù)倍處最大為δ/2,在0°、90°、180°和270°時(shí)沒有誤差。對于12位RDC,0.3%幅度失配將導(dǎo)致大約1 LSB的誤差。
RDC接受來自旋變器的差分正弦和余弦信號(hào)。旋變器從載波中移除任何直流分量,因此 V裁判必須增加/2直流偏置,以確保旋變器輸出信號(hào)在RDC的正確工作范圍內(nèi)。SIN和SINLO輸入或COS和COSLO輸入之間的直流偏置中的任何失調(diào)都會(huì)引入額外的系統(tǒng)誤差。
共模偏移引入的誤差在正弦和余弦信號(hào)載波相互反相的象限中更嚴(yán)重。這發(fā)生在 90° 和 180° 以及 270° 和 360° 之間的位置,如圖 5 所示。端子之間的共模電壓使差分信號(hào)偏移兩倍于共模電壓。RDC是比率式的,因此感知到輸入信號(hào)幅度的變化會(huì)導(dǎo)致位置誤差。
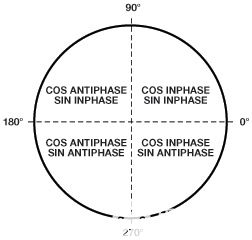
圖5.旋轉(zhuǎn)變壓器象限。
圖6顯示,即使正弦和余弦的差分峰峰值幅度相等,輸入信號(hào)的感知幅度也不同。最壞情況的誤差將發(fā)生在135°和315°。在135°時(shí),理想系統(tǒng)中的A = B,但在存在偏移的情況下A≠B,因此會(huì)發(fā)生感知的幅度不匹配。
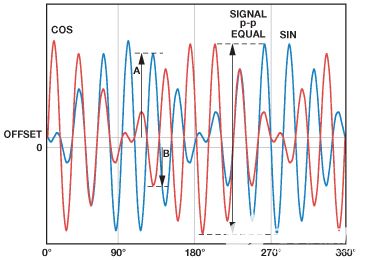
圖6.直流偏置偏移。
另一個(gè)誤差來源是差分相移,即旋變器的正弦和余弦信號(hào)之間的相移。由于耦合,所有旋變器上都會(huì)存在一些差分相移。小旋變器殘余電壓或正交電壓表示小差分相移。如果正弦和余弦信號(hào)線的電纜長度不相等或驅(qū)動(dòng)不同的負(fù)載,則可以引入額外的相移。
余弦信號(hào)相對于正弦信號(hào)的差分相位為
 |
(10) |
其中α差分相移。
求解α引入的誤差會(huì)產(chǎn)生誤差項(xiàng),ε
 |
(11) |
其中α和ε以弧度表示。
大多數(shù)旋變器還會(huì)在激勵(lì)參考信號(hào)與正弦和余弦信號(hào)之間引入相移,從而導(dǎo)致額外的誤差,ε
 |
(12) |
其中β是正弦/余弦信號(hào)和激勵(lì)參考信號(hào)之間的相移。
通過選擇殘余電壓較小的旋變器,確保以相同的方式處理正弦和余弦信號(hào),并消除參考相移,可以將該誤差降至最低。
在靜態(tài)工作條件下,激勵(lì)基準(zhǔn)和信號(hào)線之間的相移不會(huì)影響轉(zhuǎn)換器的精度,但高速旋轉(zhuǎn)變壓器由于轉(zhuǎn)子阻抗和目標(biāo)信號(hào)的電抗分量而產(chǎn)生速度電壓。速度電壓僅在速度下發(fā)生,而不是在靜態(tài)角度下發(fā)生,與目標(biāo)信號(hào)正交。它們的最大振幅為

| (13) |
在實(shí)際旋轉(zhuǎn)變壓器中,轉(zhuǎn)子繞組包括電抗和電阻分量。阻性元件在參考激勵(lì)中產(chǎn)生非零相移,當(dāng)轉(zhuǎn)子處于高速和靜態(tài)時(shí),會(huì)出現(xiàn)這種相移。與速度電壓一起,激勵(lì)的非零相移產(chǎn)生跟蹤誤差,該誤差近似為
 |
(14) |
為了補(bǔ)償旋變器基準(zhǔn)激勵(lì)與正弦/余弦信號(hào)之間的相位誤差,AD2S1210使用內(nèi)部濾波的正弦和余弦信號(hào)與參考頻率載波同相合成內(nèi)部參考信號(hào)。通過確定正弦或余弦的過零(以較大者為準(zhǔn),以提高相位精度)并評(píng)估旋變器基準(zhǔn)激勵(lì)的相位來生成,它將參考輸入和正弦/余弦輸入之間的相移降低到10°以下,并在±44°的相移下工作。合成參考模塊的框圖如圖7所示。
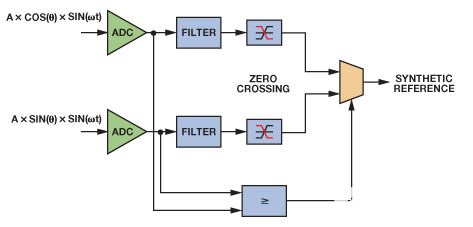
圖7.綜合參考。
與I型跟蹤環(huán)路相比,II型跟蹤環(huán)路的優(yōu)勢在于恒定速度時(shí)不會(huì)發(fā)生位置誤差。然而,即使在完全平衡的系統(tǒng)中,加速度也會(huì)產(chǎn)生誤差項(xiàng)。加速度引起的誤差量由控制環(huán)路響應(yīng)決定。圖8顯示了AD2S1210的環(huán)路響應(yīng)。
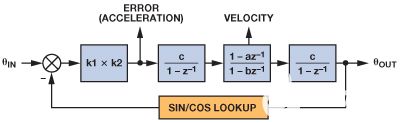
圖8.AD2S1210環(huán)路響應(yīng)
環(huán)路加速度常數(shù),K一個(gè)是
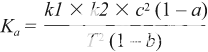
| (15) |
其中,環(huán)路系數(shù)根據(jù)分辨率、輸入信號(hào)幅度和采樣周期而變化。AD2S1210在每個(gè)CLK期間采樣兩次在時(shí)期。
表 3.RDC 系統(tǒng)響應(yīng)參數(shù)
|
參數(shù) |
描述 |
10 位分辨率 |
12 位分辨率 |
14 位分辨率 |
16 位分辨率 |
| K1 |
模數(shù)轉(zhuǎn)換器增益 |
輸入電壓/參考電壓 = (3.15/2)/2.47 (標(biāo)稱) |
|||
| K2 |
誤差增益 |
12π × 106 |
36π × 106 |
164π × 106 | 132π × 106 |
| 一個(gè) |
補(bǔ)償器 零點(diǎn)系數(shù) |
8187/8192 |
4095/4096 |
8191/8192 | 32,767/32,768 |
| b |
補(bǔ)償器 極系數(shù) |
509/512 |
4085/4096 |
16,359/16,384 | 32,757/32,768 |
| c |
積分器增益 |
1/220 |
1/222 |
1/224 |
1/226 |
| T |
采樣周期 |
1/(CLK在-2k |
|||
加速度引起的跟蹤誤差可以計(jì)算為

| (16) |
圖9顯示了不同分辨率設(shè)置下由于角度誤差與加速度的關(guān)系。
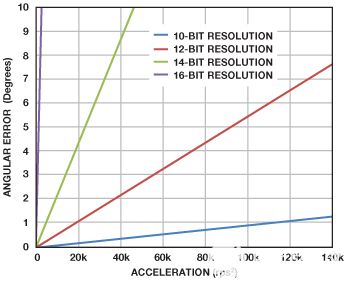
圖9.角度誤差與加速度。
輸入濾波器
為獲得最佳系統(tǒng)精度,可將旋變器輸出直接連接到AD2S1210正弦、余弦、正弦和COSLO引腳,以減少失配或相移。然而,這并不總是可行的。可能需要衰減旋變器的正弦和余弦信號(hào)以匹配RDC的輸入規(guī)格,由于噪聲環(huán)境,可能需要一些信號(hào)濾波,并且旋轉(zhuǎn)變壓器連接器可能需要ESD或短路保護(hù)。
圖10顯示了旋變器和AD2S1210之間的典型接口電路。串聯(lián)電阻器和二極管提供足夠的保護(hù),以減少外部事件(如ESD或電源或接地短路)的能量。這些電阻和電容實(shí)現(xiàn)一個(gè)低通濾波器,可降低因驅(qū)動(dòng)電機(jī)而耦合到旋變器輸入端的高頻噪聲。可能還需要衰減旋變器的正弦和余弦輸入信號(hào),以符合RDC的輸入電壓規(guī)格。這可以通過增加電阻R來實(shí)現(xiàn)一個(gè).AD2S1210具有將正弦、正弦、余弦和共弦偏置至V的內(nèi)部電路裁判/2.這種弱偏置很容易被過度驅(qū)動(dòng)。實(shí)現(xiàn)此目的的一種簡單方法是包含 47kΩ 電阻 RB,這會(huì)將信號(hào)偏置至 2.5 V。
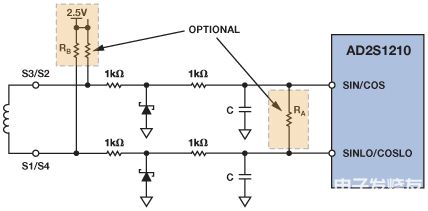
圖 10.接口電路。
激勵(lì)緩沖器
通常需要緩沖器來驅(qū)動(dòng)旋變器的低阻抗輸入。該激勵(lì)緩沖器可以通過多種方式實(shí)現(xiàn),此處顯示了其中兩種方式。第一個(gè)電路通常用于汽車和工業(yè)設(shè)計(jì),而第二個(gè)電路通過用高輸出電流放大器代替標(biāo)準(zhǔn)推挽式架構(gòu)來簡化設(shè)計(jì)。
圖11所示的大電流驅(qū)動(dòng)器對基準(zhǔn)振蕩器輸出進(jìn)行放大和電平轉(zhuǎn)換。該驅(qū)動(dòng)器采用雙通道、低噪聲、精密運(yùn)算放大器AD8662和一個(gè)分立式發(fā)射極跟隨器輸出級(jí)。重復(fù)緩沖電路提供全差分信號(hào)以驅(qū)動(dòng)旋變器的初級(jí)繞組。
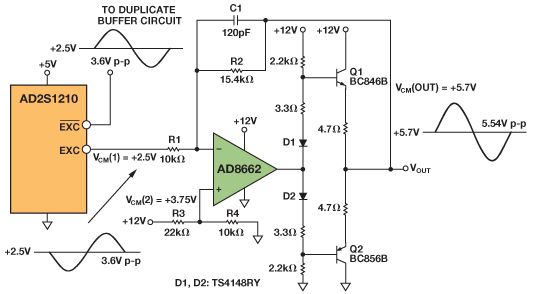
圖 11.高電流基準(zhǔn)電壓緩沖器采用帶推挽輸出的運(yùn)算放大器AD8662。
這種高電流緩沖器提供針對標(biāo)準(zhǔn)旋變器優(yōu)化的驅(qū)動(dòng)能力、增益范圍和帶寬,并且可以進(jìn)行調(diào)整以滿足應(yīng)用和傳感器的特定要求,但復(fù)雜的設(shè)計(jì)在元件數(shù)量、PCB尺寸、成本和工程時(shí)間方面存在許多缺點(diǎn),需要將其更改為特定應(yīng)用的需求。
該設(shè)計(jì)可以通過用放大器代替AD8662來優(yōu)化,該放大器可提供直接驅(qū)動(dòng)旋變器所需的高輸出電流,從而簡化設(shè)計(jì)并消除推挽級(jí)的需要。
圖12所示的大電流驅(qū)動(dòng)器使用具有軌到軌輸出的大電流雙通道運(yùn)算放大器AD8397對基準(zhǔn)振蕩器輸出進(jìn)行放大和電平轉(zhuǎn)換,從而優(yōu)化與旋變器的接口。AD8397具有低失真、高輸出電流和寬動(dòng)態(tài)范圍特性,非常適合與旋變器配合使用。該器件具有 310mA 電流能力,適用于 32 Ω負(fù)載,無需使用傳統(tǒng)的推挽級(jí)即可向旋變器提供所需的功率,從而簡化驅(qū)動(dòng)器電路并降低功耗。重復(fù)電路提供全差分信號(hào)以驅(qū)動(dòng)初級(jí)繞組。AD8397采用8引腳SOIC封裝,額定溫度范圍為–40°C至+85°C擴(kuò)展工業(yè)溫度范圍。
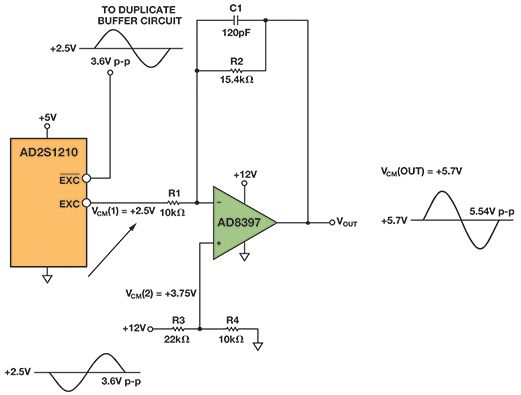
圖 12.基于運(yùn)算放大器AD8397的大電流基準(zhǔn)電壓緩沖器
可以改變無源元件值以改變輸出幅度和共模電壓,輸出幅度由放大器增益R2/R1設(shè)置,共模電壓由R3和R4設(shè)置。
電容C1和電阻R2構(gòu)成一個(gè)低通濾波器,以最大限度地降低EXC和EXC輸出端的噪聲。應(yīng)選擇電容器以最小化載波的相移。激勵(lì)輸出與正弦和余弦輸入之間的總相移不應(yīng)超過RDC的鎖相范圍。電容器是可選的,因?yàn)榻?jīng)典旋轉(zhuǎn)變壓器可以很好地濾除高頻成分。
圖13顯示了基準(zhǔn)電壓緩沖器AD8397與傳統(tǒng)推挽電路的比較。FFT分析儀測量AD2S1210激勵(lì)信號(hào)的基波和諧波功率。
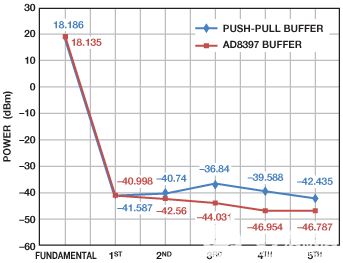
圖 13.AD8397緩沖器與AD8662推挽式緩沖器
兩種配置之間每個(gè)基波的功率差異很小,但AD8397緩沖器降低了諧波。雖然AD8397電路的失真略低,但兩個(gè)緩沖器都能提供足夠的性能。與傳統(tǒng)電路相比,取消推挽級(jí)簡化了設(shè)計(jì),占用的空間更小,功耗更低。
結(jié)論
當(dāng)與旋變數(shù)字轉(zhuǎn)換器AD2S1210結(jié)合使用時(shí),旋變器可以創(chuàng)建一個(gè)高精度、可靠的控制系統(tǒng),用于電機(jī)控制應(yīng)用中的位置和速度測量。為了實(shí)現(xiàn)最佳整體性能,需要基于AD8662或AD8397的緩沖電路來放大激勵(lì)信號(hào),并提供旋變器所需的驅(qū)動(dòng)強(qiáng)度。為了完善系統(tǒng),基本輸入電路可以根據(jù)需要提供信號(hào)調(diào)理。與所有混合信號(hào)機(jī)電一體化信號(hào)鏈一樣,必須注意設(shè)計(jì)一個(gè)考慮所有誤差源的精確系統(tǒng)。AD2S1210具有可變分辨率、基準(zhǔn)電壓源生成和片內(nèi)診斷功能,為旋變器應(yīng)用提供了理想的RDC解決方案。它有工業(yè)級(jí)和汽車級(jí)可供選擇。
審核編輯:郭婷
-
電動(dòng)汽車
+關(guān)注
關(guān)注
156文章
12107瀏覽量
231466 -
變壓器
+關(guān)注
關(guān)注
159文章
7490瀏覽量
135554 -
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8714瀏覽量
147331
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
RDC旋變數(shù)字轉(zhuǎn)換器電機(jī)應(yīng)用
精密旋變數(shù)字轉(zhuǎn)換器測量角位置和速度
精密旋變數(shù)字轉(zhuǎn)換器測量角位置和速度
精密旋變數(shù)字轉(zhuǎn)換器測量角位置和速度
精密旋變數(shù)字轉(zhuǎn)換器測量角位置和速度,不看肯定后悔
旋變數(shù)字轉(zhuǎn)換器(RDC)在汽車和工業(yè)中的應(yīng)用
高性能旋變數(shù)字轉(zhuǎn)換器AD2S1210的特點(diǎn)及應(yīng)用分析

CN0317 用于10位至16位旋變數(shù)字轉(zhuǎn)換器的集成高電流驅(qū)動(dòng)器

CN0276 高性能、10位至16位旋變數(shù)字轉(zhuǎn)換器
精密旋變數(shù)字轉(zhuǎn)換器的測量角位置和速度
分辨率旋變數(shù)字轉(zhuǎn)換器AD2S1210應(yīng)用指南
高性能、10位至16位旋變數(shù)字轉(zhuǎn)換器電路筆記





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論