 隔離式柵極驅動器:什么、為什么以及如何
隔離式柵極驅動器:什么、為什么以及如何
IGBT/功率MOSFET是一種電壓控制器件,用作電源電路和電機驅動器等系統中的開關元件。柵極是每個設備的電氣隔離控制端子。 MOSFET的其他端子是源極和漏極,對于IGBT,它們被稱為集電極和發射極。為了工作MOSFET/IGBT,通常必須向柵極施加相對于器件源極/發射極的電壓。專用驅動器用于向功率器件的柵極施加電壓并提供驅動電流。本文討論這些柵極驅動器是什么,為什么需要它們,以及如何定義它們的基本參數,如時序、驅動強度和隔離度。
需要柵極驅動器
IGBT/功率MOSFET的結構使得柵極形成非線性電容器。對柵極電容充電會使功率器件導通并允許電流在其漏極和源極端子之間流動,而放電時,它會關閉器件,然后可能會在漏極和源極端子上阻塞大電壓。柵極電容充電且器件幾乎可以導通時的最小電壓是閾值電壓(V千).對于將 IGBT/功率 MOSFET 用作開關,電壓要大于 V千應應用于柵極和源極/發射極之間。
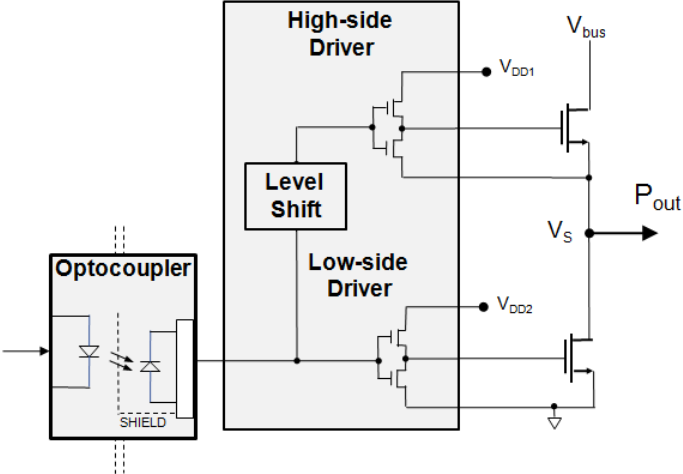
考慮一個帶有微控制器的數字邏輯系統,該微控制器可以在其中一個I/O引腳上輸出0 V至5 V的PWM信號。該PWM不足以完全打開電源系統中使用的功率器件,因為其過驅動電壓通常超過標準CMOS/TTL邏輯電壓。因此,在邏輯/控制電路和高功率器件之間需要一個接口。這可以通過驅動邏輯電平n溝道MOSFET來實現,而邏輯電平n溝道MOSFET又可以驅動功率MOSFET,如圖1a所示。
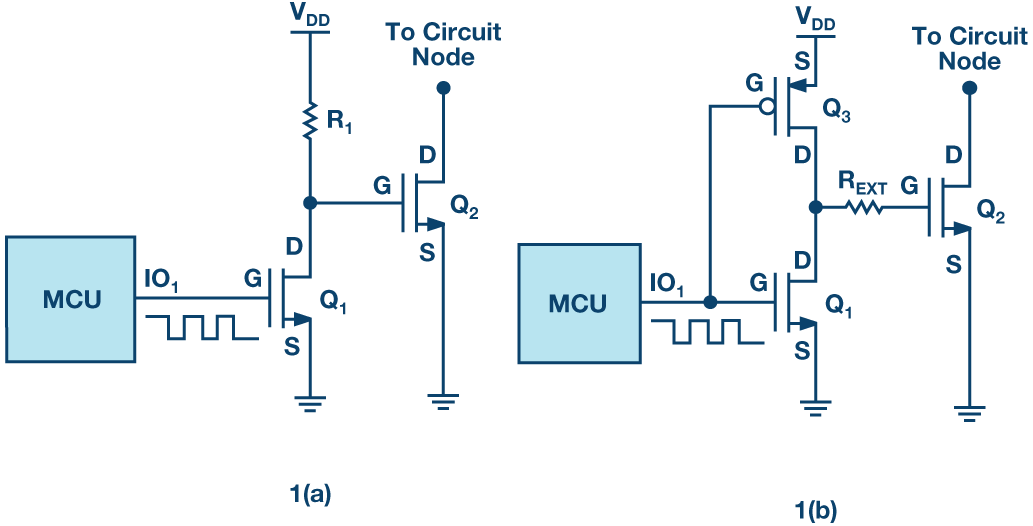
圖1.采用反相邏輯驅動的功率 MOSFET。
如圖 1a 所示,當 IO1發出低信號,VGSQ1< VTHQ1因此,MOSFET Q1仍然關閉。因此,在功率MOSFET Q的柵極處施加正電壓2.Q的柵極電容2(CGQ2) 通過上拉電阻 R 充電1并將柵極電壓拉至V的軌電壓DD.給定 VDD> VTHQ2/ 22打開并可以傳導。當 IO1輸出高電平,Q1打開和 CGQ2通過 Q 放電1.VDSQ1~ 0 V 使得 VGSQ2< VTHQ2因此,Q2關閉。此設置的一個問題是 R 中的功耗1在 Q 狀態期間1.為了克服這個問題,pMOSFET Q3可用作上拉,以與Q互補的方式運行1,如圖1b所示。 PMOS具有低導通電阻,并且在關斷狀態下具有非常高的電阻,因此大大降低了驅動電路中的功耗。為了控制柵極轉換期間的邊沿速率,在Q漏極之間外部增加了一個小電阻1和Q之門2.使用MOSFET的另一個優點是易于在芯片上制造它,而不是制造電阻器。這種用于驅動電源開關柵極的獨特接口可以以單片IC的形式創建,該IC接受邏輯電平電壓并產生更高的功率輸出。該柵極驅動器IC幾乎總是具有額外的內部電路以實現更大的功能,但它主要用作功率放大器和電平轉換器。
柵極驅動器的關鍵參數
驅動強度:
提供適當柵極電壓的問題通過使用執行電平轉換器工作的柵極驅動器來解決。但是,柵極電容器不能瞬時改變其電壓。因此,功率FET或IGBT具有非零的有限開關間隔。在開關過程中,器件可能處于高電流和高電壓狀態,從而導致熱量形式的功耗。因此,從一種狀態到另一種狀態的轉換需要快速,以最大限度地減少切換時間。為此,需要高瞬態電流來快速對柵極電容進行充電和放電。
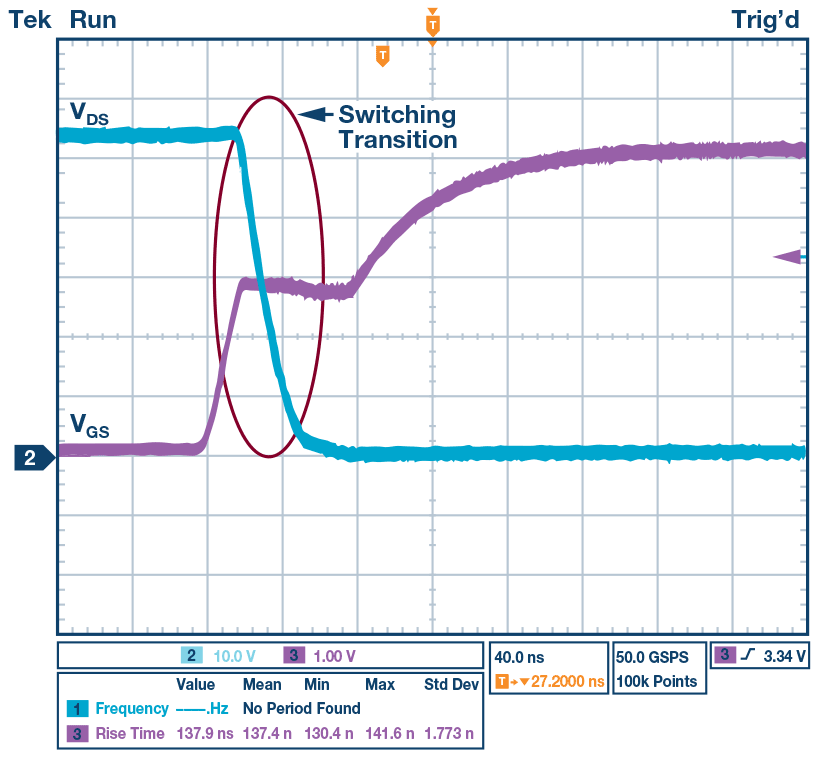
數字。2. MOSFET 導通過渡,無需柵極驅動器
能夠在較長時間內供應/吸收更高柵極電流的驅動器產生較短的開關時間,從而降低其驅動的晶體管內的開關功率損耗。
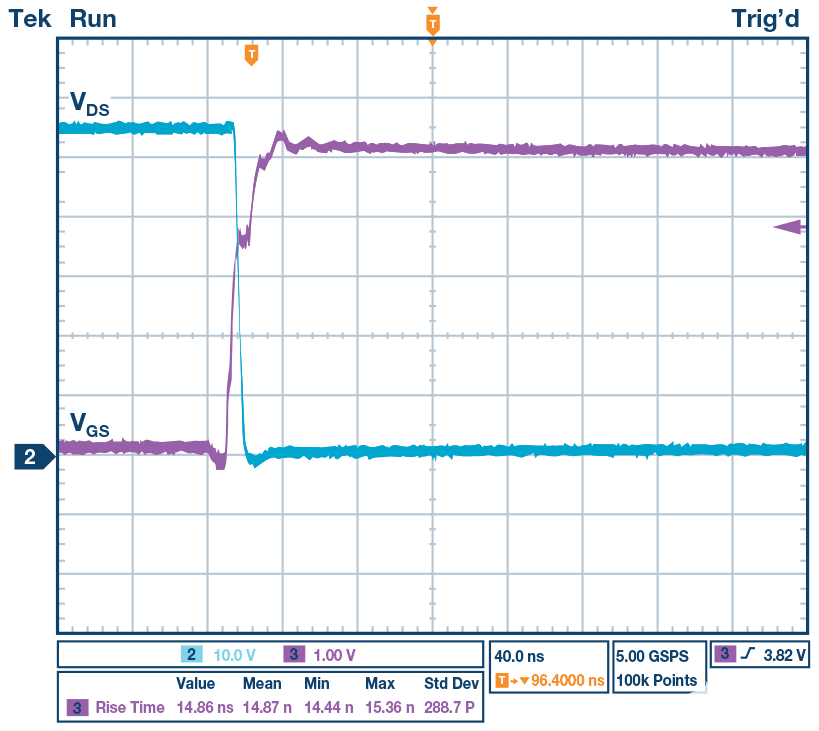
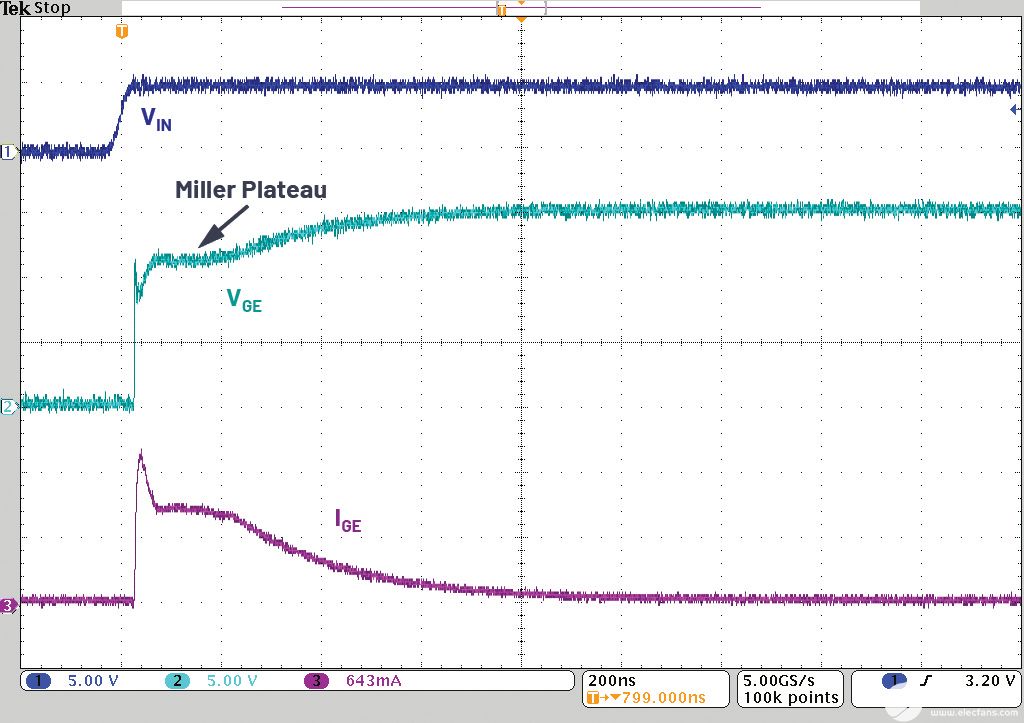
圖3.MOSFET 通過柵極驅動器導通過渡。
微控制器I/O引腳的拉電流和灌電流額定值通常高達數十毫安,而柵極驅動器可以提供更高的電流。在圖2中,當功率MOSFET由微控制器I/O引腳在其最大額定源電流下驅動時,觀察到較長的開關間隔。如圖3所示,使用隔離式柵極驅動器ADuM4121可顯著縮短轉換時間,該驅動器提供比微控制器I/O引腳高得多的驅動電流,驅動相同功率的MOSFET。在許多情況下,直接使用微控制器驅動更大功率的MOSFET/IGBT可能會過熱并損壞控制,因為數字電路中可能存在電流過敏。具有更高驅動能力的柵極驅動器可實現快速開關,上升和下降時間為幾納秒。這降低了開關功率損耗,使系統更加高效。因此,驅動電流通常被認為是選擇柵極驅動器的重要指標。
與驅動電流額定值對應的是漏源導通電阻(RDS(ON)) 的柵極驅動器。雖然理想情況下 RDS(ON)MOSFET 在完全導通時的值應為零,由于其物理結構,它通常在幾歐姆的范圍內。這考慮了從漏極到源極的電流路徑中的總串聯電阻。
RDS(ON)是柵極驅動器最大驅動強度額定值的真正基礎,因為它限制了驅動器可以提供的柵極電流。RDS(ON)的內部開關決定灌電流和拉電流,但外部串聯電阻用于降低驅動電流,從而影響邊沿速率。如圖4所示,高端導通電阻和外部串聯電阻R內線在充電路徑中形成柵極電阻,低側導通電阻與R內線在放電路徑中形成柵極電阻。
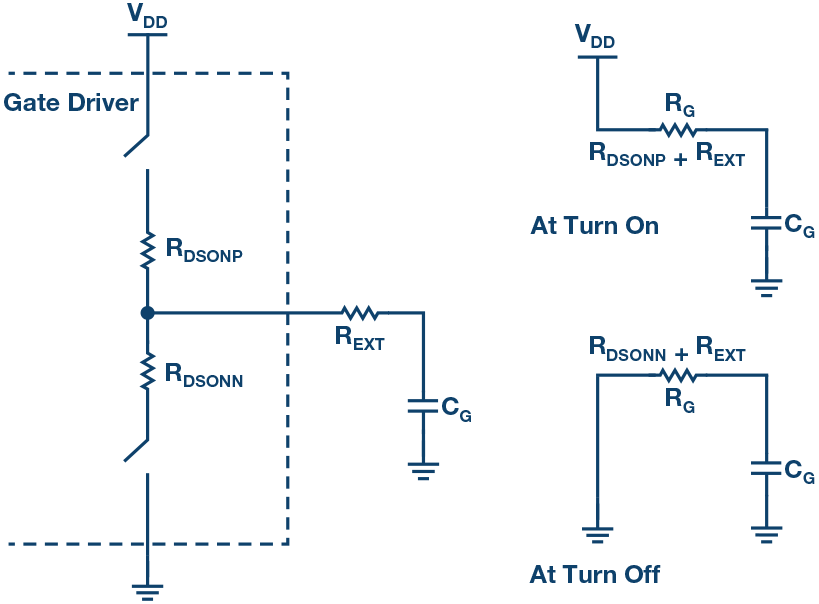
圖4.具有MOSFET輸出級和功率器件作為電容器的柵極驅動器的RC電路模型。
RDS(ON)還直接影響驅動器內部的功耗。對于特定的驅動電流,較低的值為RDS(ON)允許更高的R內線要使用的。由于功耗分布在R之間內線和 RDS(ON),R 的值越高 內線意味著更多的功率耗散在驅動器外部。因此,為了提高系統效率并放寬驅動器內的任何熱調節要求,較低的R值DS(ON)對于給定的芯片面積和IC尺寸,是優選的。
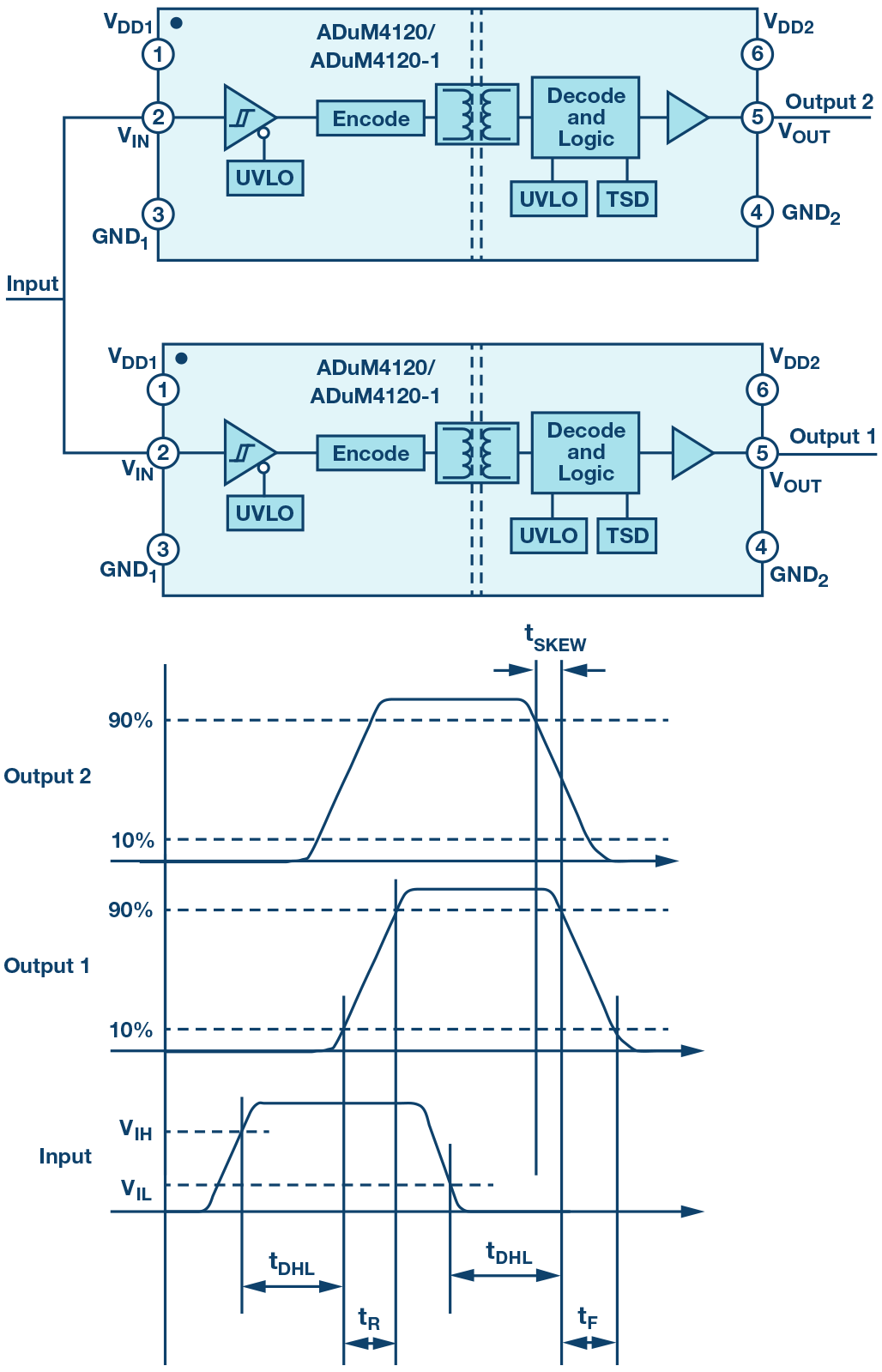
圖5.ADuM4120柵極驅動器和時序波形
定時:
柵極驅動器時序參數對于評估其性能至關重要。包括ADuM4120在內的所有柵極驅動器的通用時序規格(如圖5所示)是傳播延遲(tD) 的驅動程序,定義為輸入邊沿傳播到輸出所花費的時間。如圖5所示,傳播延遲上升(t德華)可以定義為輸入邊沿上升到輸入高閾值(VIH) 的輸出上升到其最終值的 10% 以上。類似地,下降傳播延遲(t敦豪) 可以表示為從輸入邊沿下降到輸入低閾值 V 以下的時間伊利諾伊州到時間輸出低于其高水平的90%。對于上升沿和下降沿,輸出轉換的傳播延遲可能不同。
圖5還顯示了信號的上升和下降時間。這些邊沿速率受器件可以提供的驅動電流的影響,但它們也取決于被驅動的負載,并且在傳播延遲計算中沒有考慮在內。另一個時序參數是脈沖寬度失真,即同一器件的上升和下降傳播延遲之間的差異。因此,脈沖寬度失真 (PWD) = |t唰 –t敦豪|.
由于不同部分內的晶體管不匹配,兩個部分的傳播延遲永遠不會完全相同。這會導致傳播延遲偏差(t扭曲),定義為在相同工作條件下對同一輸入做出反應時,兩個不同器件的輸出轉換之間的時間差。如圖5所示,傳播延遲偏差定義為器件間偏差。對于具有多個輸出通道的器件,此規格以相同的方式表示,但表示為通道間偏斜。傳播延遲偏斜通常不能在控制電路中考慮。
圖6顯示了ADuM4121柵極驅動器的典型設置,采用半橋配置,采用功率MOSFET,適用于電源和電機驅動應用。在這樣的設置中,如果兩個Q1和 Q2同時打開,由于電源和接地端子短路,有可能擊穿。這可能會永久損壞開關甚至驅動電路。為避免擊穿,必須在系統中插入死區時間,以便大大降低兩個開關同時打開的可能性。在死區時間間隔內,兩個開關的柵極信號都很低,因此,開關理想情況下處于關斷狀態。如果傳播延遲偏差較低,則所需的死區時間較低,并且控制變得更加可預測。具有更低的偏斜和更低的死區時間,可實現更平穩、更高效的系統運行。
定時特性很重要,因為它們會影響電源開關的運行速度。了解這些參數有助于實現更簡單、更精確的控制電路設計。
隔離:
它是系統中各種功能電路之間的電氣分離,使得它們之間沒有直接的傳導路徑可用。這允許單個電路具有不同的接地電位。信號和/或功率仍然可以使用電感、電容或光學方法在隔離電路之間傳遞。對于具有柵極驅動器的系統,出于功能目的,隔離可能是必要的,也可能是一項安全要求。在圖 6 中,我們可以有 V總線數百伏特,數十安培電流通過 Q1或 Q2在給定時間。如果該系統出現任何故障,如果損壞僅限于電子元件,則可能不需要安全隔離,但如果控制側有人為參與,則需要在高功率側和低壓控制電路之間進行電氣隔離。它提供高壓側任何故障保護,因為隔離柵阻止電力到達用戶,盡管組件損壞或故障。
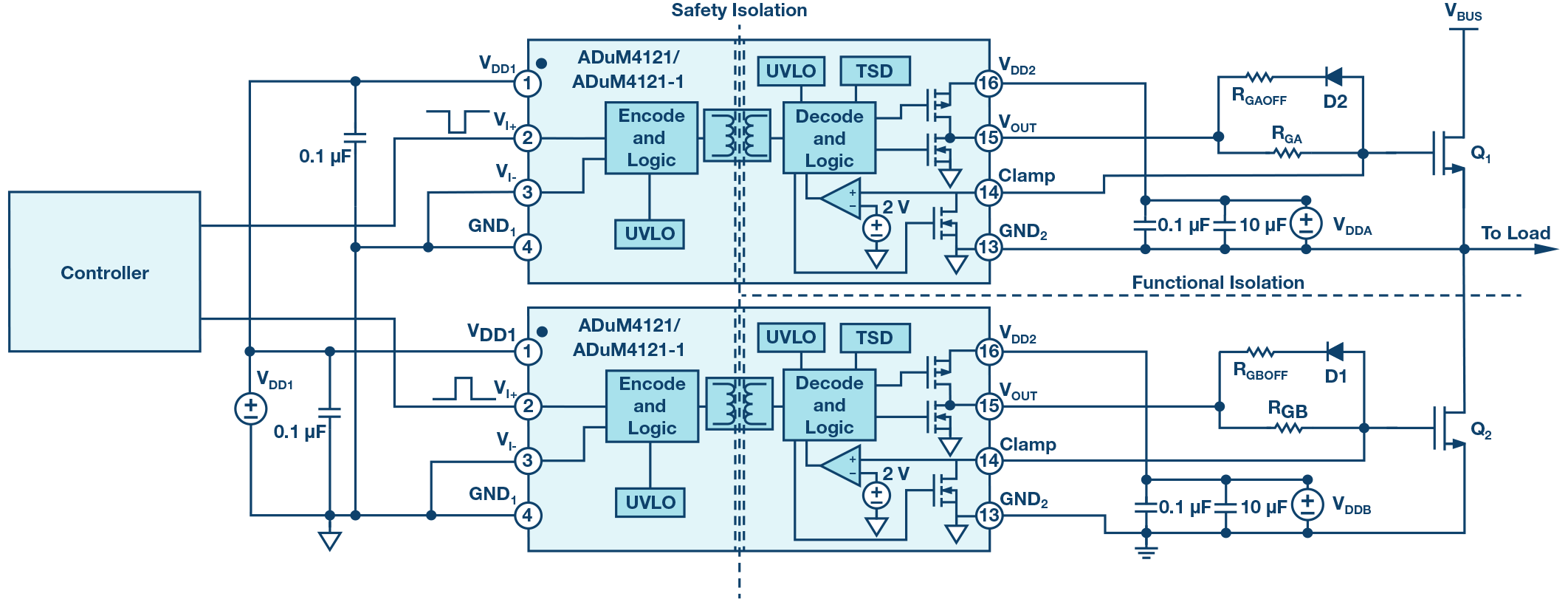
圖6.半橋設置中的隔離柵,采用ADuM4121隔離式柵極驅動器
監管和安全認證機構強制要求隔離,以防止電擊危險。它還可以保護低壓電子設備免受高功率側故障造成的任何損壞。描述安全隔離的方法多種多樣,但從根本上說,它們都與隔離柵擊穿的電壓有關。該電壓額定值通常在驅動器的整個生命周期內給出,以及特定持續時間和配置文件的電壓瞬變。這些電壓電平還對應于驅動器IC的物理尺寸以及隔離柵兩端引腳之間的最小距離。
除了安全原因外,隔離對于系統的正確運行也是必不可少的。圖6顯示了電機驅動電路中常用的半橋拓撲,其中給定時間只有一個開關導通。在高功率側,低側晶體管Q2其源接地。Q的柵源電壓2(五GSQ2)因此直接以地為參考,驅動電路的設計相對簡單。高邊晶體管Q不是這種情況。1,因為它的來源是開關節點,根據哪個開關接通,該節點被拉到總線電壓或地。打開 Q 的步驟1,正柵極至源極電壓 (VGSQ1),應應用超過其閾值電壓。因此,柵極電壓Q1將高于 V總線當它處于打開狀態時,源連接到 V總線.如果驅動電路沒有接地參考隔離,則電壓大于V總線將需要驅動 Q1.這是一個繁瑣的解決方案,對于高效的系統來說是不切實際的。因此,需要電平轉換并參考高端晶體管源的控制信號。這稱為功能隔離,可以使用隔離式柵極驅動器(如ADuM4223)來實現。
抗噪性:
柵極驅動器用于固有大量噪聲源的工業環境。噪聲會損壞數據并使系統不可靠,從而導致性能下降。因此,柵極驅動器需要具有良好的抗噪聲能力,以確保數據完整性。抗噪性與驅動器抑制電磁干擾(EMI)或RF噪聲以及共模瞬變的能力有關。
EMI是破壞電子設備預期操作的任何電噪聲或磁干擾。影響柵極驅動器的EMI是高頻開關電路的結果,主要是由于大型工業電機的磁場而產生的。EMI可以是輻射或傳導的,并且可以耦合到附近的其他電路中。因此,對EMI或RF抗擾度的抗擾度是指柵極驅動器抑制電磁干擾并保持穩健運行而無錯誤的能力。具有高EMI抗擾度,允許驅動器在大型電機附近使用,而不會在數據傳輸中引入任何故障。
如圖6所示,隔離柵有望在不同電位下提供跨地的高壓隔離。但高頻開關會導致副邊的電壓轉換邊沿較短。由于隔離邊界之間的寄生電容,這些快速瞬變從一側耦合到另一側,這可能導致數據損壞。這可能是在柵極驅動信號中引入抖動或完全反轉信號的形式,導致效率低下,在某些情況下甚至直通。因此,柵極驅動器的定義指標是共模瞬變抗擾度(CMTI),它定量描述了隔離式柵極驅動器抑制其輸入和輸出之間的大共模瞬變的能力。如果系統中的壓擺率很高,則驅動器的抗擾度需要很高。因此,在高頻和大總線電壓下工作時,CMTI數字尤其重要。
結論
本文旨在介紹柵極驅動器,因此,到目前為止討論的參數并未構成有關隔離式柵極驅動器規格的詳盡列表。還有其他驅動器指標,如電源電壓、允許溫度、引腳排列等,與每個電子部件一樣,這些都是常見的考慮因素。ADuM4135和ADuM4136等一些驅動器還集成了保護功能或高級檢測或控制機制。市場上的隔離式柵極驅動器種類繁多,使得系統設計人員必須了解所有這些規格和特性,以便就相關應用中使用適當的驅動器做出明智的決定。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17715瀏覽量
250116 -
驅動器
+關注
關注
52文章
8236瀏覽量
146337 -
電機驅動
+關注
關注
60文章
1216瀏覽量
86746
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論