 Σ-ΔADC架構可在同步關鍵分布式系統時避免數據流中斷
Σ-ΔADC架構可在同步關鍵分布式系統時避免數據流中斷
本文介紹了基于SAR ADC的系統和基于Σ-Δ(Σ-Δ)ADC的系統傳統上同步分布式數據采集系統的方式,并探討了兩種架構之間的差異。此外,我們還將討論嘗試同步多Σ-Δ型ADC時的典型不便之處。最后,提出了一種基于AD7770采樣速率轉換器(SRC)的新方法,展示了如何在不中斷數據流的情況下在基于Σ-Δ ADC的系統上實現同步。
介紹
你有沒有想象過自己在超音速飛機上打破音障?自從協和式飛機退役以來,這似乎是一個不可能實現的夢想,除非你是軍事飛行員或宇航員。
作為一名電子工程師,我著迷于一切是如何工作的,例如,在布谷鳥鐘中,以及每個系統如何與其他系統完美同步和諧地工作。
這適用于我們生活的方方面面。當我們生活在一個互聯的世界中時,一切都是同步的——從銀行服務器到智能手機的警報。唯一的區別是每種特定情況下要解決的問題的量級或復雜性,不同系統的同步與所需的精度(或可容忍的誤差)或要同步的系統的大小。
分布式系統
在獨立設計中,同步是所使用的本地時鐘或振蕩器所固有的。但是,當獨立設計應該集成到更廣泛的系統(我們稱之為分布式系統)時,問題的角度會發生變化,獨立設計應該針對用例進行相應的設計。
在系統中,要計算電器的瞬時功耗,必須同時測量電流和電壓。
通過執行快速分析,您可以通過三種不同的方式解決問題:
使用兩個同步單通道ADC測量電流和電壓。
使用多通道同步采樣ADC,每個通道有一個ADC或一個采樣保持電路。
使用一個多路復用ADC并插值測量結果,以補償電壓和電流測量之間的時移。
在這一點上,您可能有一個可靠的解決方案來解決問題,但讓我們將系統要求從最初的單個電器擴展到必須測量工廠中每個交流電源插座的功率的應用。現在,您最初的瞬時功耗設計應該分布在工廠周圍,并以某種方式設計成同時測量和計算每個交流電源插座中的功率。
您現在正在處理一個分布式系統,該系統由一組彼此分開但密切相關的子系統組成。每個子系統都需要提供在完全相同的時間點采樣的數據,以便可以計算工廠的總瞬時功耗。
最后,如果我們繼續擴展假設的應用示例,想象一下您的原始設計將被集成到您所在國家的電網中。現在,您正在感應數百萬瓦的功率,鏈路中的任何故障都可能產生可怕的結果,例如由于壓力條件而導致的電源線損壞,這反過來可能導致停電,并帶來嚴重的后果,例如野火或醫院在沒有能源供應的情況下運行。
因此,一切都需要精確同步,也就是說,電網中捕獲的數據應在完全相同的時間點捕獲,而與地理位置無關,如圖1所示。

圖1.電網同步。
在這些情況下,您可以將其視為關鍵的分布式系統,并且必須從每個感知節點獲取連續的、完全同步的數據流。
與電網示例類似,這些要求適用于航空航天或工業市場中可能發現的許多其他關鍵分布式系統示例。
奈奎斯特和過采樣ADC
在解釋如何同步許多ADC的采樣時刻之前,最好先了解每種ADC拓撲如何確定何時對模擬輸入信號進行采樣,以及每種架構的優缺點。
奈奎斯特或SAR ADC:該轉換器的最大輸入頻率由奈奎斯特或半采樣頻率決定。
過采樣或Σ-Δ型ADC:最大輸入頻率通常是最大采樣頻率的一小部分,通常約為0.3×。
一方面,SAR ADC的輸入信號采樣時刻通過施加到轉換啟動引腳的外部脈沖進行控制。如果將公共轉換開始信號施加到正在同步的系統中的每個SAR ADC(如圖2所示),它們都將在轉換開始信號的邊沿同時觸發采樣。只需確保信號之間沒有明顯的延遲(即轉換起始脈沖在同一時刻到達每個SAR ADC),即可輕松實現系統同步。請注意,到達轉換起始引腳的脈沖與實際采樣時刻之間的傳播延遲不應因器件而異,在采樣速度相對較低的精密ADC中,傳播延遲并不顯著。
在施加轉換開始脈沖(稱為轉換時間)后的某個時間,轉換結果將通過所有ADC的數字接口提供。

圖2.同步基于 SAR ADC 的分布式系統。
另一方面,Σ-Δ ADC的操作由于其架構而略有不同。在這種類型的轉換器中,內部內核(調制器)以更高的頻率(調制器頻率,f國防部)比奈奎斯特規定的最小頻率,這就是它被稱為過采樣ADC的原因。
通過以比嚴格需要的頻率高得多的頻率采樣,可以收集更多數量的樣本。然后通過平均濾波器對所有ADC數據進行后處理,原因有兩個:
每 1 個平均樣本,噪聲降低 4 位。
平均濾波器傳遞函數是低通濾波器。當Σ-Δ架構將其量化噪聲推向高頻時,應將其消除,如圖3所示。因此,此過濾是通過此平均濾波器完成的。

圖3.Σ-Δ噪聲整形。
平均采樣數(稱為抽取比(N))決定了輸出數據速率(ODR),即ADC提供轉換結果的速率(以每秒采樣數為單位),如公式1所示。抽取比通常是一個整數,在數字濾波器上具有一組離散可編程的預定義值(即N = 32、64、128等)。因此,通過保持f國防部常數,則 ODR 將根據預定義值集中的 N 值進行配置。

平均過程通常由sinc濾波器在內部實現,調制器的類似轉換起始脈沖也在內部產生,因此在觸發轉換過程時沒有外部控制。這種類型的轉換器確實是連續采樣,跟蹤輸入信號并處理獲取的數據。一旦該過程(采樣和平均)完成,轉換器就會生成一個數據就緒信號,向控制器指示數據可以通過數字接口讀回。
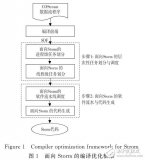
如圖 4 所示,Σ-Δ 的流程可以概括為四個主要步驟:
調制器對信號進行采樣,頻率為f國防部頻率。
樣本通過sinc數字濾波器取平均值。
sinc濾波器的結果被失調和增益校正。
數據就緒引腳切換,指示轉換結果已準備好由控制器回讀。

圖4.Σ-Δ ADC 流。
由于內部采樣觸發時沒有外部控制,為了同步分布式系統中的多個Σ-Δ型ADC,必須同時復位所有數字濾波器,因為控制平均轉換開始的是數字濾波器。
圖 5 顯示了假設 ODR 相同時對同步的影響,并且國防部在所有Σ-Δ型ADC中。

圖5.Σ-Δ 系統重置同步。
與基于SAR ADC的系統類似,必須確保復位濾波器脈沖同時到達所有子系統。
但是,請注意,每次重置數字濾波器時,數據流都會中斷,因為濾波器必須再次穩定。在這種情況下,數據中斷的持續時間取決于數字濾波器階數,即 f國防部和抽取率。圖 6 顯示了一個示例,其中濾波器的 LPF 特性延遲了生成有效輸出的時間。

圖6.由于數字濾波器建立時間而導致的數據中斷。
對分布式系統中同步采樣的影響
在分布式系統中,全局同步信號(我們稱之為Global_SYNC)在所有模塊/子系統之間共享。該同步信號可以由主站或第三方系統(如GPS 1 pps)生成,如圖1所示。
一旦收到Global_SYNC信號,每個模塊必須重新同步每個轉換器的瞬時采樣,很可能是其本地時鐘,以保證同時性。
在基于 SAR ADC 的分布式系統中,如上一節所述,重新同步本質上很容易:本地時鐘(管理轉換開始信號)與Global_SYNC信號重新對齊,從此使這些信號同步。
這在產生頻率雜散方面具有意義,因為在同步過程中,有一個樣本是在不同的時間和距離收集的,如圖7中的藍色突出顯示。在分布式應用中,這些雜散可能是可以接受的,而在前面提到的電力線監控等應用中,中斷數據流確實至關重要。

圖7.將SAR ADC轉換過程與全局同步信號對齊。
在基于Σ-Δ的分布式系統中,與Global_SYNC信號有關的再同步稍微復雜一些,因為調制器對模擬輸入信號進行連續采樣,并且轉換過程不像SAR ADC那樣由外部控制。
同步多個基于Σ-Δ的分布式系統的最簡單方法是重置數字濾波器:所有收集和存儲的調制器樣本用于平均濾波器,數字濾波器被清空。這意味著,根據數字濾波器階數,需要一些時間才能再次建立其輸出,如圖5和圖6所示。
一旦數字濾波器建立,它將再次提供有效的轉換數據,但考慮到建立所需的時間,在Σ-Δ ADC上重置數字濾波器可能不被接受。分布式系統需要重新同步的頻率越高,數據流中斷就越多,由于持續的數據流中斷,這使得Σ-Δ型ADC對于關鍵的分布式系統不切實際。
傳統上,最小化數據中斷的方法是使用可調時鐘,例如PLL,它可以減少全局同步和f之間的誤差。國防部頻率。
接收到Global_SYNC脈沖后,Σ-Δ型ADC轉換啟動與Global_SYNC脈沖之間的不確定性可以按照類似于以下過程計算:
控制器計算采樣時刻(通過了解群延遲從數據就緒信號向后計算,如圖8所示)和Global_SYNC脈沖之間的時間差。群延遲是數據手冊的規格,它考慮了從輸入采樣到數據就緒引腳切換之間的時間,表明樣品已準備好讀取。

圖8.模擬輸入采樣和數據就緒切換之間的時間延遲。
如果采樣時刻和Global_SYNC之間存在差異,則本地控制器量化時間差(t提前或 t延遲),如圖 9 所示。

圖9.量化每個ADC的采樣時刻(假設群延遲已知)與全局同步信號之間的差異。
如果存在差異,可以重置Σ-Δ濾波器或f國防部可以修改以調整幾個樣本中的Σ-Δ采樣。在這兩種情況下,都會遺漏一些樣本。請注意,通過更改本地時鐘頻率 (f國防部),Σ-Δ ADC 正在修改其輸出數據速率 (ODR = f國防部/N),以便ADC對其模擬輸入進行較慢或較快的采樣,目的是使該ADC趕上系統上的其余ADC和Global_SYNC。
如果 f國防部更新后,一旦同步,主時鐘頻率將恢復到原始頻率以返回到以前的ODR,而子系統從此變為同步。
這個改變f的過程國防部在一定時間內如圖10所示。

圖 10.使用PLL調諧調制器頻率的同步方法。
在某些情況下,此方法可能不適用,因為需要考慮一些細節:
將調制器頻率更改為非倍數值可能不切實際。
如果可以微調頻率,則變化時的頻率步進必須很小,否則數字濾波器可能會超出范圍,因此同步例程的提前期會變長。
如果所需的ODR變化足夠大,可以通過改變抽取率(N)而不是調制器頻率(f國防部),但這也意味著缺少樣本。
使用PLL意味著消耗額外的功率加上其自身的建立時間,直到達到所需的調制器頻率。
一般而言,整體系統復雜性和成本會增加,隨著系統尺寸的增加而增加,特別是與SAR ADC相比,只需將轉換開始與Global_SYNC信號對齊即可更輕松地解決此問題。此外,在許多情況下,根據上述系統限制和限制,一定無法使用Σ-Δ ADC。
輕松重新同步Σ-Δ型ADC,無數據中斷
AD7770系列(包括AD7770、AD7771和AD7779)內置SRC。隨著這種新架構的引入,抽取因子(N)作為固定值的限制不再有效。
SRC 允許您將十進制數(而不僅僅是整數)編程為抽取率 (N),從而允許您對任何所需的輸出數據速率進行編程。在以前的同步方法上,由于N是固定的,因此需要改變外部時鐘以調整f國防部為了執行同步例程。
使用AD7770系列產品時,由于N可靈活編程和動態重新編程,因此無需更改任何ODR,即可對任何ODR進行編程。國防部并且不會中斷數據。
這種用于重新同步基于sigma-Δ的子系統的新方法利用SRC簡化了重新同步,最大限度地減少了前面部分中描述的復雜性。
新方法如下:
當接收到Global_SYNC信號時,每個子系統檢查其是否同步采樣,以數據就緒信號為參考,并使用群延遲來查找實際采樣時刻。
如果采樣時刻與接收到Global_SYNC信號時存在差異,則本地控制器量化時差(t 提前或 t延遲) 如圖 9 所示。
新的 ODR 被編程為通過 SRC 修改抽取因子 (N) 來臨時生成更快或更慢的 ODR。重新同步的整個操作將始終需要4個樣本(如果AD6上啟用了sinc5濾波器,則為7771個樣本),但由于這些樣本仍然有效且100%建立,因此不會中斷數據流。
一旦收到所需的DRDY量,抽取因子將再次重新編程以返回到所需的ODR,從而保證Σ-Δ轉換器與其他子系統同步,如圖11所示,而不會中斷數據流。

圖 11.采樣率轉換器動態調整ODR,以便在所有設備上重新同步采樣。
結論
關鍵的分布式系統需要所有子系統中的同步轉換和連續的數據流。
SAR轉換器提供了一種直觀的方法,通過重新調整轉換開始信號并將其與Global_SYNC脈沖對齊來重新同步采樣。
在需要高動態范圍(DR)或信噪比(SNR)規格的應用中,SAR不是一種選擇,但傳統的Σ-Δ轉換器由于無法靈活地在不中斷數據流的情況下重新調整而變得具有挑戰性。
如示例中所示,與其他解決方案相比,SRC 提供了具有最小延遲且成本和復雜性低得多的無縫同步例程。
在很多應用中,SRC也可以是有利的。與電力線監控示例一樣,任何線路頻率變化都可以通過即時更改抽取率來補償。這樣,電力線始終以相干采樣頻率進行采樣。在這里,在關鍵的分布式系統中,事實證明SRC對于重新同步系統也非常有用,而不必中斷數據流,也不需要PLL等額外組件。AD7770解決了同步基于Σ-Δ ADC的分布式系統的傳統問題,不會丟失采樣,避免了基于PLL的方法增加的成本和復雜性。
審核編輯:郭婷
-
轉換器
+關注
關注
27文章
8714瀏覽量
147331 -
濾波器
+關注
關注
161文章
7834瀏覽量
178275 -
adc
+關注
關注
98文章
6505瀏覽量
544903
發布評論請先 登錄
相關推薦
同步關鍵的分布式系統時,新型Σ-Δ ADC架構可避免中斷的數據流

分布式軟件系統
基于SAR ADC和sigma-delta ADC的分布式數據采集系統同步的傳統方法
OpenHarmony 分布式硬件關鍵技術
數據流編程模型優化


分布式數據流上的高性能分發策略

什么是分布式系統 分布式架構有哪些
Σ-ΔADC架構可在同步關鍵分布式系統時避免數據流中斷

什么是分布式架構?





 工商網監
工商網監
評論