") 多傳感器融合成為方向!從前融合到后融合,激光雷達(dá)進(jìn)階3.0時(shí)代
多傳感器融合成為方向!從前融合到后融合,激光雷達(dá)進(jìn)階3.0時(shí)代
電子發(fā)燒友網(wǎng)報(bào)道(文/莫婷婷)2020年之前,激光雷達(dá)市場國外企業(yè)一枝獨(dú)秀,2020年,華為進(jìn)軍激光雷達(dá)市場,到了2021年,小鵬汽車推出首款搭載激光雷達(dá)的汽車,拉開國內(nèi)車企激光雷達(dá)“上車”的序幕。可以期待的是,隨著量產(chǎn)時(shí)代的到來,激光雷達(dá)將進(jìn)入新的發(fā)展階段。業(yè)內(nèi)人士預(yù)計(jì),下一代激光雷達(dá)技術(shù)將朝著多傳感器融合的方向演進(jìn)。
但激光雷達(dá)產(chǎn)業(yè)的發(fā)展還存在一些核心問題亟待解決,例如激光雷達(dá)供應(yīng)商如何在高性能、低成本的前提下,以及更大規(guī)模和場景下確保車規(guī)量產(chǎn)、交付;怎么才能實(shí)現(xiàn)激光雷達(dá)所支持的 L2、L3、 L4等更高層級的自動駕駛功能、更高精度的環(huán)境感知功能,并且讓用戶真正體驗(yàn)到激光雷達(dá)的價(jià)值。
上述都是在激光雷達(dá)2.0階段下需要探討的問題,未來進(jìn)入激光雷達(dá)3.0,則需要關(guān)注如何提升駕駛安全、用戶體驗(yàn)、改善感知融合,以及感受激光雷達(dá)核心價(jià)值。但是從2.0向3.0過渡,激光雷達(dá)技術(shù)在助力自動駕駛技術(shù)演進(jìn)的過程中還面臨諸多方面的挑戰(zhàn)。
探維科技創(chuàng)始人王世瑋認(rèn)為自動駕駛感知困局是Robotaxi傳感器性能不斷提高時(shí),融合方案并沒有得到很好的結(jié)果。車上傳感器形態(tài)持續(xù)演進(jìn),在能夠降低成本的前提下,廠商需要考慮車規(guī)量產(chǎn),并且要將硬件方案整合到量產(chǎn)車型的配置中,與車身進(jìn)行融合設(shè)計(jì)。
例如在汽車廠商中,特斯拉在自動駕駛傳感器的使用上一直在尋找最佳方案。此前,特斯拉采用的是純視覺方案,2022年年底,4D毫米波雷達(dá)憑借成本優(yōu)勢,且分辨率更高,被賽靈思、博世、華為等越來越多廠商所關(guān)注,并且特斯拉極有可能將其加入汽車中。4D毫米波雷達(dá)也因此被業(yè)內(nèi)人士認(rèn)為是激光雷達(dá)的平替產(chǎn)品。
可以發(fā)現(xiàn),智能汽車中,傳感器不僅僅是激光雷達(dá)。Model 3配備8個(gè)攝像頭、1個(gè)毫米波雷達(dá)、12個(gè)超聲波雷達(dá)。小鵬P5配備了9個(gè)攝像頭、2個(gè)激光雷達(dá)、4個(gè)全景攝像頭、5個(gè)毫米波雷達(dá)和12個(gè)超聲波傳感器。探維科技也已經(jīng)與合創(chuàng)汽車聯(lián)合打造了一款搭載激光雷達(dá)的MPV,這也是合創(chuàng)V09目前唯一搭載激光雷達(dá)的MPV,并且全車配備了24個(gè)傳感器。
當(dāng)傳感器的種類數(shù)量增加,汽車廠商必須考慮激光雷達(dá)與不同傳感器之間的配合,在算法層、決策層面都要有取舍。不管是系統(tǒng)集成商還是主機(jī)廠,傳感器之間如何配合對他們來說都是極大的挑戰(zhàn)。那么,該如何讓智能汽車的各個(gè)傳感器與激光雷達(dá)實(shí)現(xiàn)更好地配合呢?
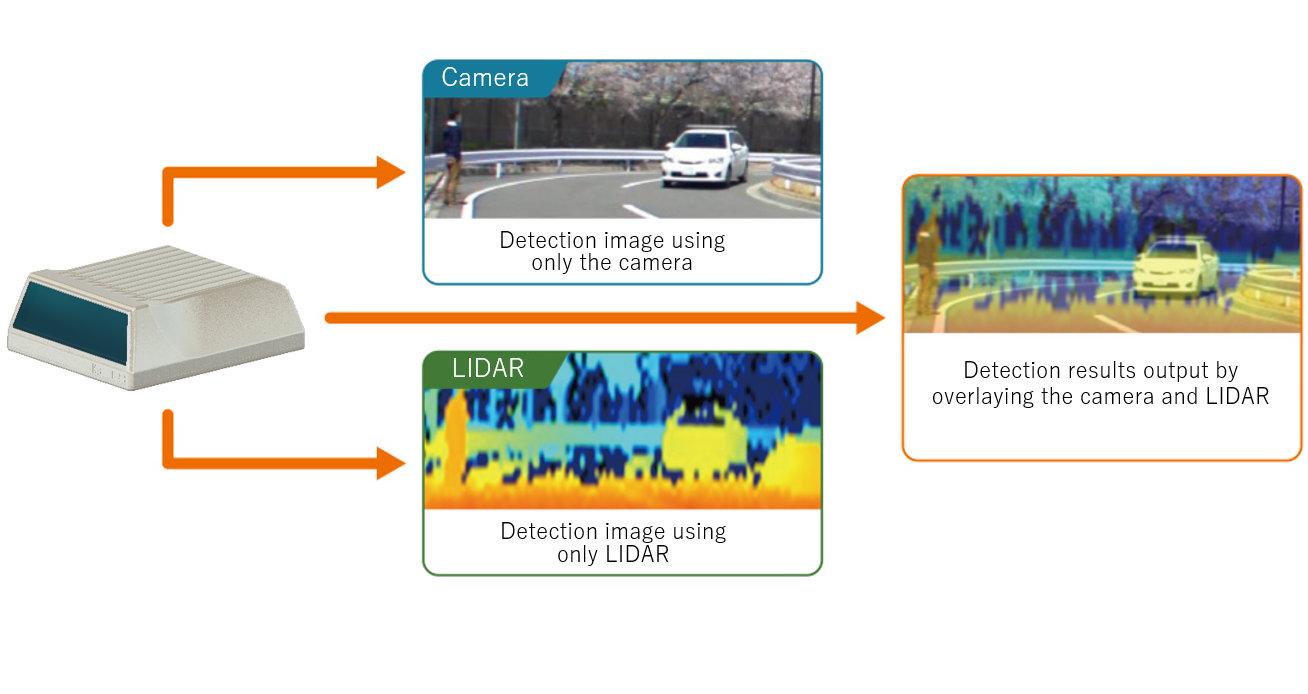
據(jù)了解,目前在車載端,激光雷達(dá)和其他傳感器之間的配合主要是采用后融合方案,各個(gè)傳感器獨(dú)立做感知算法,再把結(jié)構(gòu)化的數(shù)據(jù)做融合,通過系統(tǒng)層做綜合判斷和決策。但目標(biāo)級圖像后融合還在一些技術(shù)難題,比如融合精度低、時(shí)間同步困難,系統(tǒng)標(biāo)定方案復(fù)雜、需要融合補(bǔ)償算法等。此外,由于是后融合的架構(gòu),因此是先感知再融合,在整個(gè)決策過程當(dāng)中還會涉及關(guān)鍵信息的丟失、誤檢率、漏檢率等,其他功能也會受到限制。
探維科技認(rèn)為激光雷達(dá) 3. 0會往硬件級圖像前融合發(fā)展,推出了Tanway Fusion解決激光雷達(dá)的兼容性、可靠性、適應(yīng)性問題,能發(fā)揮出多傳感器的優(yōu)勢。以其64線激光雷達(dá)為例,該產(chǎn)品的探測距離為200米,分辨率為0.16°*0.32°,空間同步精度可以達(dá)到為100米內(nèi)3cm,時(shí)間同步精度達(dá)到微秒級。
激光雷達(dá)如何提高空間同步精度和時(shí)間同步精度呢?據(jù)了解,探維科技的方案把圖像sensor加到既有的激光雷達(dá)硬件系統(tǒng)當(dāng)中,內(nèi)部再用同一套光源同步接收可見光、紅外光,經(jīng)過數(shù)據(jù)處理之后就可以拿到前融合的系統(tǒng)。其中融合精度是靠光學(xué),即通過光路系統(tǒng)解決點(diǎn)對應(yīng)的問題;時(shí)間同步是靠同一個(gè)硬件,探維科技用同一套時(shí)鐘系統(tǒng)保證每一個(gè)測量點(diǎn)、像素,讓時(shí)間同步精度保持微秒級。
從激光雷達(dá)1.0的概念,再到激光雷達(dá)2.0,再到3.0,激光雷達(dá)技術(shù)在不斷迭代,并且助力自動駕駛技術(shù)的發(fā)展,未來隨著技術(shù)的成熟,自動駕駛感知能力也將不斷提升。
但激光雷達(dá)產(chǎn)業(yè)的發(fā)展還存在一些核心問題亟待解決,例如激光雷達(dá)供應(yīng)商如何在高性能、低成本的前提下,以及更大規(guī)模和場景下確保車規(guī)量產(chǎn)、交付;怎么才能實(shí)現(xiàn)激光雷達(dá)所支持的 L2、L3、 L4等更高層級的自動駕駛功能、更高精度的環(huán)境感知功能,并且讓用戶真正體驗(yàn)到激光雷達(dá)的價(jià)值。
上述都是在激光雷達(dá)2.0階段下需要探討的問題,未來進(jìn)入激光雷達(dá)3.0,則需要關(guān)注如何提升駕駛安全、用戶體驗(yàn)、改善感知融合,以及感受激光雷達(dá)核心價(jià)值。但是從2.0向3.0過渡,激光雷達(dá)技術(shù)在助力自動駕駛技術(shù)演進(jìn)的過程中還面臨諸多方面的挑戰(zhàn)。
探維科技創(chuàng)始人王世瑋認(rèn)為自動駕駛感知困局是Robotaxi傳感器性能不斷提高時(shí),融合方案并沒有得到很好的結(jié)果。車上傳感器形態(tài)持續(xù)演進(jìn),在能夠降低成本的前提下,廠商需要考慮車規(guī)量產(chǎn),并且要將硬件方案整合到量產(chǎn)車型的配置中,與車身進(jìn)行融合設(shè)計(jì)。
例如在汽車廠商中,特斯拉在自動駕駛傳感器的使用上一直在尋找最佳方案。此前,特斯拉采用的是純視覺方案,2022年年底,4D毫米波雷達(dá)憑借成本優(yōu)勢,且分辨率更高,被賽靈思、博世、華為等越來越多廠商所關(guān)注,并且特斯拉極有可能將其加入汽車中。4D毫米波雷達(dá)也因此被業(yè)內(nèi)人士認(rèn)為是激光雷達(dá)的平替產(chǎn)品。
可以發(fā)現(xiàn),智能汽車中,傳感器不僅僅是激光雷達(dá)。Model 3配備8個(gè)攝像頭、1個(gè)毫米波雷達(dá)、12個(gè)超聲波雷達(dá)。小鵬P5配備了9個(gè)攝像頭、2個(gè)激光雷達(dá)、4個(gè)全景攝像頭、5個(gè)毫米波雷達(dá)和12個(gè)超聲波傳感器。探維科技也已經(jīng)與合創(chuàng)汽車聯(lián)合打造了一款搭載激光雷達(dá)的MPV,這也是合創(chuàng)V09目前唯一搭載激光雷達(dá)的MPV,并且全車配備了24個(gè)傳感器。
當(dāng)傳感器的種類數(shù)量增加,汽車廠商必須考慮激光雷達(dá)與不同傳感器之間的配合,在算法層、決策層面都要有取舍。不管是系統(tǒng)集成商還是主機(jī)廠,傳感器之間如何配合對他們來說都是極大的挑戰(zhàn)。那么,該如何讓智能汽車的各個(gè)傳感器與激光雷達(dá)實(shí)現(xiàn)更好地配合呢?
據(jù)了解,目前在車載端,激光雷達(dá)和其他傳感器之間的配合主要是采用后融合方案,各個(gè)傳感器獨(dú)立做感知算法,再把結(jié)構(gòu)化的數(shù)據(jù)做融合,通過系統(tǒng)層做綜合判斷和決策。但目標(biāo)級圖像后融合還在一些技術(shù)難題,比如融合精度低、時(shí)間同步困難,系統(tǒng)標(biāo)定方案復(fù)雜、需要融合補(bǔ)償算法等。此外,由于是后融合的架構(gòu),因此是先感知再融合,在整個(gè)決策過程當(dāng)中還會涉及關(guān)鍵信息的丟失、誤檢率、漏檢率等,其他功能也會受到限制。
探維科技認(rèn)為激光雷達(dá) 3. 0會往硬件級圖像前融合發(fā)展,推出了Tanway Fusion解決激光雷達(dá)的兼容性、可靠性、適應(yīng)性問題,能發(fā)揮出多傳感器的優(yōu)勢。以其64線激光雷達(dá)為例,該產(chǎn)品的探測距離為200米,分辨率為0.16°*0.32°,空間同步精度可以達(dá)到為100米內(nèi)3cm,時(shí)間同步精度達(dá)到微秒級。
激光雷達(dá)如何提高空間同步精度和時(shí)間同步精度呢?據(jù)了解,探維科技的方案把圖像sensor加到既有的激光雷達(dá)硬件系統(tǒng)當(dāng)中,內(nèi)部再用同一套光源同步接收可見光、紅外光,經(jīng)過數(shù)據(jù)處理之后就可以拿到前融合的系統(tǒng)。其中融合精度是靠光學(xué),即通過光路系統(tǒng)解決點(diǎn)對應(yīng)的問題;時(shí)間同步是靠同一個(gè)硬件,探維科技用同一套時(shí)鐘系統(tǒng)保證每一個(gè)測量點(diǎn)、像素,讓時(shí)間同步精度保持微秒級。
從激光雷達(dá)1.0的概念,再到激光雷達(dá)2.0,再到3.0,激光雷達(dá)技術(shù)在不斷迭代,并且助力自動駕駛技術(shù)的發(fā)展,未來隨著技術(shù)的成熟,自動駕駛感知能力也將不斷提升。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2552文章
51322瀏覽量
755356 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4003瀏覽量
190157
發(fā)布評論請先 登錄
相關(guān)推薦
激光雷達(dá)+攝像頭融合傳感器,有沒有搞頭?
電子發(fā)燒友網(wǎng)報(bào)道(文/梁浩斌)對于自動駕駛而言,除了自動駕駛算法之外,傳感器標(biāo)定一直都是一個(gè)難題,一般會在車輛出廠前駛?cè)氲綄iT的場地使用特定設(shè)備來對各種傳感器進(jìn)行校準(zhǔn)。尤其是多傳感器硬
雨量水位數(shù)據(jù)采集終端機(jī)RTU:多傳感器融合,水文監(jiān)測數(shù)據(jù)遠(yuǎn)程查看
多傳感器融合的雨量水位數(shù)據(jù)采集終端機(jī)RTU,正以其卓越的性能和全面的數(shù)據(jù)采集能力,成為水文監(jiān)測領(lǐng)域的得力助手。讓我們共同迎接精準(zhǔn)監(jiān)測的新時(shí)代
多傳感器融合在自動駕駛中的應(yīng)用趨勢探究
整合分析,多傳感器融合不僅能夠彌補(bǔ)單一傳感器的局限性,還大大提升了感知系統(tǒng)的精確性。 ? 智能駕駛傳感器的種類及技術(shù)概述 1.1

激光雷達(dá)在SLAM算法中的應(yīng)用綜述
SLAM算法運(yùn)行的重要傳感器。基于激光雷達(dá)的SLAM算法,對激光雷達(dá)SLAM總體框架進(jìn)行介紹,詳細(xì)闡述前端里程計(jì)、后端優(yōu)化、回環(huán)檢測、地圖構(gòu)建模塊的作用并總結(jié)所使用的算法;按由2D到 3D,單

激光雷達(dá)與其他傳感器的比較
在現(xiàn)代科技領(lǐng)域,傳感器技術(shù)的發(fā)展日新月異,為各行各業(yè)提供了強(qiáng)大的數(shù)據(jù)支持。激光雷達(dá)作為一種高精度的遙感技術(shù),近年來在多個(gè)領(lǐng)域得到了廣泛應(yīng)用。然而,激光雷達(dá)并非萬能,它與其他傳感器相比,
MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合
電子發(fā)燒友網(wǎng)站提供《MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合.pdf》資料免費(fèi)下載
發(fā)表于 10-18 10:40
?0次下載

計(jì)算機(jī)視覺中的圖像融合
。多模態(tài)融合則是將來自不同傳感器的圖像結(jié)合起來,也稱為多傳感器融合。其主要應(yīng)用包括醫(yī)學(xué)影像、監(jiān)控

半導(dǎo)體激光雷達(dá)及傳感器件產(chǎn)業(yè)化項(xiàng)目落地德州
5月31日下午,德州天衢新區(qū)管委會與廣東先導(dǎo)稀材股份有限公司簽訂總投資50億元的半導(dǎo)體激光雷達(dá)及傳感器件產(chǎn)業(yè)化項(xiàng)目投資協(xié)議,標(biāo)志著繼有研、立訊之后,德州新一代信息技術(shù)產(chǎn)業(yè)進(jìn)入新的發(fā)展階段。 ? 根據(jù)
森思泰克全新推出96線激光雷達(dá)和192線激光雷達(dá)產(chǎn)品
多傳感器融合方案是智能駕駛感知技術(shù)的必然趨勢。它以攝像頭、毫米波雷達(dá)、超聲波雷達(dá)以及激光雷達(dá)等多

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
的信息,將感知系統(tǒng)的感知維度擴(kuò)展以實(shí)現(xiàn)多維度(多模態(tài))感知目標(biāo)的完整信息。如下圖示例,芯片將攝像頭圖像數(shù)據(jù),和雷達(dá)探測目標(biāo)的距離、速度、散射截面R的感知數(shù)據(jù),以及紅外傳感器探測的熱輻射圖像數(shù)據(jù)疊加組
發(fā)表于 04-11 10:26
深度解析:多傳感器融合SLAM技術(shù)全景剖析
SLAM中,先驗(yàn)值通常從一系列傳感器獲得,比如慣性測量單元(IMU)和編碼器,而觀測值則是通過GPS、相機(jī)和激光雷達(dá)等其他傳感器獲取的,后驗(yàn)
發(fā)表于 02-23 11:31
?3312次閱讀

基于Transformer的多模態(tài)BEV融合方案
由于大量的相機(jī)和激光雷達(dá)特征以及注意力的二次性質(zhì),將 Transformer 架構(gòu)簡單地應(yīng)用于相機(jī)-激光雷達(dá)融合問題是很困難的。
發(fā)表于 01-23 11:39
?929次閱讀

華為激光雷達(dá)參數(shù)怎么設(shè)置
華為激光雷達(dá)是一種常用的傳感器技術(shù),可用于距離測量和感應(yīng)。它的參數(shù)設(shè)置對于確保其性能和功能至關(guān)重要。在本文中,我們將詳細(xì)介紹華為激光雷達(dá)的參數(shù)設(shè)置以及其影響和應(yīng)用。 首先,我們需要了解激光雷達(dá)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論