 淺析氣象雷達的基本知識及注意事項2
淺析氣象雷達的基本知識及注意事項2
一、基本知識
1、ALL模式和ON PATH模式區別
起飛, 選擇顯示 ALL WX ,檢查離場軌跡,ALL為默認模式。
飛行中,切換ON PATH方式,進行 單體分析 ,然后回到ALL位置。
2、湍流探測TURB功能
顯示選擇ALL或者ON PATH,TURB探測飛機前方40nm的湍流天氣。
**3、滑行測試填滿雷達的3D緩沖區
**
滑行期間, 電門設置ON位,需要30s, 自動掃描本機前方全部空域( 前方320海里以及地面以上60000英尺的完整空域 ),存儲所有氣象信息且持續更新,自動修正地球地表曲率。
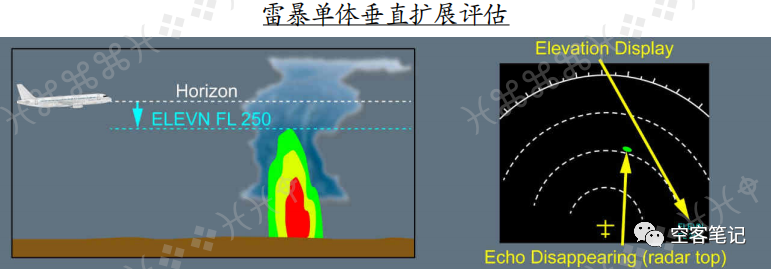
**4、用ELEVN評估雷暴單體垂直擴展
**
從0到60000英尺的高度,以每1000英尺的高度層變化來觀察各高度層的氣象狀況。 當雷暴單體從ND上消失時 ,機組可以在ND右下方讀出雷暴單體的 相應高度 。
5、內置地形數據庫,MAP功能
使用MAP功能識別突出的 地形特征 ,比如海岸線、湖泊、以及大型人工建筑等。
選擇WX時,消除氣象顯示時的地面回波。
選擇 地圖時 ,地圖模式MAP顯示時,消除氣象回波。

6、增益控制可以任何模式下使用
一旦增益控制位置脫離了校準位, “MAN GAIN” 會出現在顯示器上,從而告知現在的系統已經不工作在校準位置了。

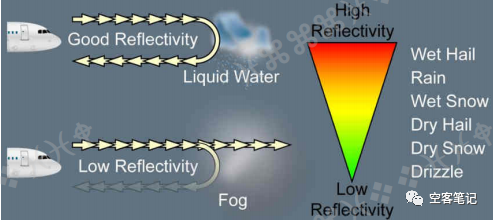
減小增益也可以用來幫助捕獲層云降水中的嵌入式暴雨氣象單元。也可以用這個變化將雷達陰影變得更加明顯,來捕獲衰減區域。

增益的 MAX (最大)位 僅在巡航高度使用 。在 ELEVN模式下去觀某一高度層, 最大增益對于探測結冰層以上 ,反射弱的氣象目標是有幫助的。在結冰層以上嚴重的潮濕氣象是形成冰雹的主要因素。

二、注意事項
1、在飛機航路內外的氣象區分顯示
在ALL或者ALL WX模式,對遠高于或遠低于飛機飛行航路( 航路外 )的氣象狀況,將 采用與航路內氣象不同的顯示模式 。
在ON PATH或者PATH WX模式, 航路外氣象被抑制 ,只顯示和飛行航路相關的氣象。
2、RDR的性能局限性
內置地形數據庫的采用極大地減少了地面回波的影響。然而,數據庫里并沒有人造反射體的數據,比如機場和城市建筑物。因此有可能不是所有的地面回波都能夠被抑制。
天線波束在近距離時相對較窄,而距離較遠時則顯著變寬。因此 氣象回波的精度在近距離時明顯優于遠距離回波 。
3、避讓機動原則
在離暴雨單元至少40海里之外時應確定避讓計劃,允許機組有充分的時間和ATC申請繞飛。
4、考慮暴雨單元的高度對飛行的影響
對于任何28000英尺以上的綠色、黃色、紅色以及洋紅色區域,避讓時應 至少偏離其20海里 。
35000英尺以上的氣象單元被認為是非常危險的,避讓時應 考慮額外的水平間隔 (除20海里間隔之外)。

5、使用MAP功能+氣象模式,輔助識別陰影區
強降水或大片的地形可能降低雷達波的穿透性以及呈現整個區域氣象圖像的能力。這被稱之為 “ 雷達衰減” 。
可 使用 MAP 模式結合氣象模式來識別陰影區域 ,觀察 強烈氣象回波后方的地面回波 。當有強降水阻擋時,強降水后方區域的地面回波將無法呈現,而是顯示為一處陰影。這種情況可能預示著在雷達顯示器上有一大片的強降水區域。

-
雷達
+關注
關注
50文章
2936瀏覽量
117533 -
數據庫
+關注
關注
7文章
3799瀏覽量
64396 -
MAP
+關注
關注
0文章
49瀏覽量
15144
發布評論請先 登錄
相關推薦
LED驅動電源的分類、選擇及使用注意事項
雷達液位計機械的運輸及安裝注意事項
導波雷達料位計對于液位安裝時注意事項
鋰離子電池充電的基礎知識以及設計注意事項
集成電路的基本知識及使用注意事項
鋰電池的特性分類與應用范圍及使用注意事項等基本知識詳細概述
雷達物位計的接線方法和注意事項
淺析氣象雷達的基本知識及注意事項1





 工商網監
工商網監
評論