 尺寸、重量、功率和成本都低的多模式、多任務、軟件定義毫米波雷達
尺寸、重量、功率和成本都低的多模式、多任務、軟件定義毫米波雷達
尺寸、重量、功率和成本都低的多模式、多任務、軟件定義毫米波雷達
Erik Ojefors, Sivers Semiconductors AB;Peter Fox, aiRadar Inc.
一系列有源電子掃描相控陣(AESA)毫米波雷達被設計成具有多模式、多任務、軟件定義雷達(SDR)的能力。這些研究用雷達針對各種市場,包括高級駕駛輔助系統(ADAS)、小型無人機(sUAV)探測和跟蹤系統、sUAV空對空和空對地雷達以及sUAV機載合成孔徑雷達(SAR)。這些雷達旨在促進雷達研究和開發,從早期階段的操作概念到需求定義和驗證,再到系統設計、驗證和部署。
這些雷達由aiRadar公司設計和制造,收發模塊(TRM)使用Sivers公司的高度集成、最先進的射頻集成電路。它們可以在扇區掃描儀和單通干涉SAR(InSAR)之間無縫切換。扇區掃描儀覆蓋90度方位角,角分辨率0.5度,垂直方向可以三基線干涉定位;InSAR部署在sUAV上,其距離和方位角分辨率優于5厘米和0.5度,生成數字表面模型(DSM),可進行多達16個通道的沿線干涉測量,用于高分辨率明晰移動目標指示(MTI)。
InSAR配置提供了多孔徑SAR的能力,具有位移相位中心天線(DPCA)微導航功能。這些雷達的尺寸從最小的型號,質量為3850克,包括三個發射(Tx)和三個接收(Rx)的64單元陣列,到最大的型號,質量不到10公斤,包含1,536個有源元件的相同陣列布局的256單元陣列。
目標客戶是商業、軍事和學術研究人員,他們尋求使用符合IP-67和Mil-Std-810標準的堅固的可重配置的儀器來開發雷達最新技術。使用簡單但功能強大的雷達編程語言(aiRPL)部署這些研究雷達,該語言在基于現場可編程門陣列的多模式雷達處理器(aiRPU)上執行,消除了與開發基于分析和仿真的AESA雷達系統相關的風險,無論是計算機仿真還是使用雷達目標仿真器進行空中驗證。
一個ADAS開發商可能希望對不同陣列尺寸和具有虛擬或真實陣列單元的各種AESA配置進行實際操作比較。例如,這些研究雷達允許將2Tx和4Rx MIMO陣列與12Tx和16Rx MIMO陣列進行直接同地和同時間的比較。同樣,12Tx和16Rx MIMO陣列(有192個虛擬通道)可以與256Tx和512Rx陣列(有512個真實通道)進行比較。aiRPL中的一個簡單腳本可以管理這種復雜性,使這三種(或更多的雷達配置)在PRI-to-PRI基礎上循環,提供相同操作條件下的雷達性能的客觀比較。
一旦特定應用的要求和AESA配置得到驗證,商業、軍事或學術雷達開發商可根據風險評估、經濟性或上市時間的緊迫性,進行內部雷達設計或由aiRadar定制雷達。這可以通過或不通過aiRadar編程語言編譯器和雷達處理器IP核的授權來完成。
aiRPU IP核提供實時雙向接口,最高可達48Gbps,與最低級別的同相和正交原始雷達數據通道,以及aiRPU IP核相連。這個接口是為認知自適應(CA)雷達的研究人員和開發人員提供的,允許外部人工智能(AI)處理器,也許是基于GPU陣列,在PRI-to-PRI基礎上修改從發射脈沖到波束方向的任何或所有雷達配置。
一個例子是ADAS的自適應脈沖編碼調制(PCM),在擁擠的雷達環境中,隨著越來越多的雷達被部署在越來越先進的系統中,ADAS將存在這種情況。CA環路有助于分析接收到的信號,以確定是否存在干擾源(另一車輛),并選擇PCM編碼來拒絕該干擾。該CA環路在軍事應用的低概率攔截(LPI)雷達中也有應用。CA物理和API接口的一個關鍵特征是,CA回路中的算法仍然是其開發者的獨家知識產權。
為了便于發放實驗和研究許可證,首次供應的研究雷達的中心頻率為66GHz。研究雷達的結構是這樣的:TRM的數字控制和射頻接口能夠利用Sivers現有的技術將硬件重新配置到24GHz,或者利用未來的技術重新配置到76-81GHz。通用的TRM接口預計會出現新分配的毫米波頻段,如果它們出現的話。
ADAS
鑒于雷達傳感器能夠在雨、霧和雪等條件下工作,而這些條件會損害或使激光雷達傳感器和視覺攝像機無法工作,因此,雷達一定會用于ADAS。
目前部署在汽車中的大多數雷達的分辨率非常低。雖然低分辨率的雷達能檢測到一個物體、一輛摩托車、一個人或一輛卡車,但該物體顯示的只是一個“圓球”而已。物體識別的任務在很大程度上被轉移到人工智能/機器學習(ML)算法上。
這種功能的分配可能有幾個原因,其中一個可能是需求定義和驗證,設計和制造帶有復雜AESA天線的先進現代雷達是很困難的。這種困難轉化為技術、性能、進度和成本風險。低成本和低風險的先進AESA的出現可能會使這種分配發生變化,也許會使雷達自主性水平得到提高。
除了設計和制造復雜的先進AESA雷達外,驗證和持續的產品保證也不是小事,需要有明確的指標。一個簡單的要求,如綜合旁瓣比(ISLR)影響到兩個目標的角度分辨率和單個目標的角度測量精度,并對圖像質量產生重大影響。這種分辨率和圖像質量的缺乏可能會對AI/ML對場景的解釋產生非常消極的影響。
軍事和商業雷達系統
最近出現了越來越多的雷達應用,而目前的雷達在這些應用中表現不佳或不適合。這些應用包括用于探測和監測構成安全和軍事威脅的小型無人機的真實孔徑雷達(RAR),sUAV上使用的高分辨率成像SAR和/或RAR。
一個很好的例子是部署在洪水現場的InSAR,所需的產品是疊加在DSM上的高分辨率場景,在河岸和斜坡消退時實時捕獲,用附加在這些物體上的速度矢量(MTI)識別感興趣的物體。
SAR提供了極高的分辨率,但需要移動,而RAR從靜止的位置提供了優秀的圖像質量。部署有三維InSAR DSM的無人機SAR可能是高分辨率威脅和損害評估的首選儀器,而部署有AESA的無人機RAR可能更適合實時發現目標。
陣列結構和收發模塊
在一個具有通用接口的單一硬件平臺上用SDR實現多種應用、多種模式和多種任務,作為一種經濟和實惠的解決方案是具有挑戰性的。早期決定實施混合波束賦形結構,在16個天線單元的級別上采用模擬波束賦形,在更高級別上采用數字波束賦形,減少了ADC的數量和數據速率。
Sivers主要開發基于先進半導體技術的MMIC、模塊和子系統,用于WiGig毫米波網絡。其TRXBF01 RFIC被集成到一個模塊中,該模塊是具有16個Tx和16個Rx單元的陣列,覆蓋了從57到71GHz的14GHz帶寬。在90度水平掃描的AESA中,Sivers模塊的每通道發射功率為+11dBm,接收噪聲系數為7dB。圖1顯示了BFM01模塊的正面。這些RFIC模塊由評估套件支持。
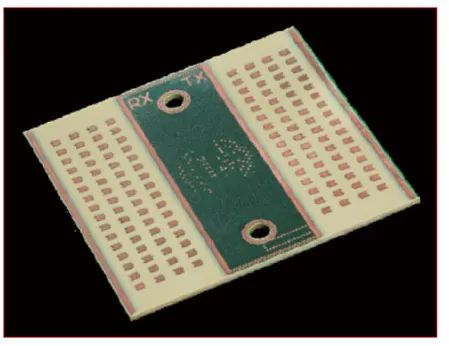
圖1Sivers收發器的天線側。
專門為aiRadar開發了一個定制的版本,帶有用于相干多模塊AESA的寬帶寬調制的接口。BFM06012-RFM這個裝置具有4GHz發射帶寬的調制輸入,能夠實現5厘米的距離分辨率。垂直波束寬度經過漸變修正,產生30度的波束寬度,旁瓣水平低于-20dB。aiRadar已經將這些模塊集成到研究雷達中,較小的RRI-100顯示在圖2中,較大的RRI-400顯示在圖3中。

圖2RRI-100研究型雷達。
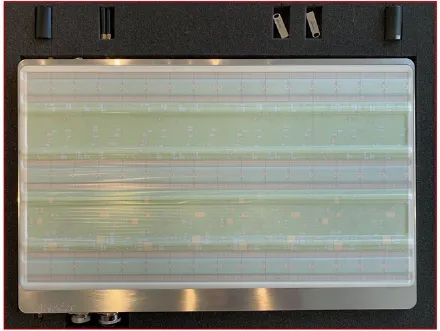
圖3RRI-400研究型雷達。
在這兩張圖中,天線罩凹槽中可以看到Tx/Rx,一對在天線罩的頂部,一對在中間,一對在底部。從頂部到中間的間距與從中間到底部的間距
審核編輯 :李倩
-
功率
+關注
關注
14文章
2068瀏覽量
69933 -
收發模塊
+關注
關注
0文章
20瀏覽量
8681 -
毫米波雷達
+關注
關注
107文章
1049瀏覽量
64426
原文標題:尺寸、重量、功率和成本都低的多模式、多任務、軟件定義毫米波雷達(原載于《微波雜志》23年1/2月號)
文章出處:【微信號:actMWJC,微信公眾號:actMWJC】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論