 Arduino常用的三種通信協議 2
Arduino常用的三種通信協議 2
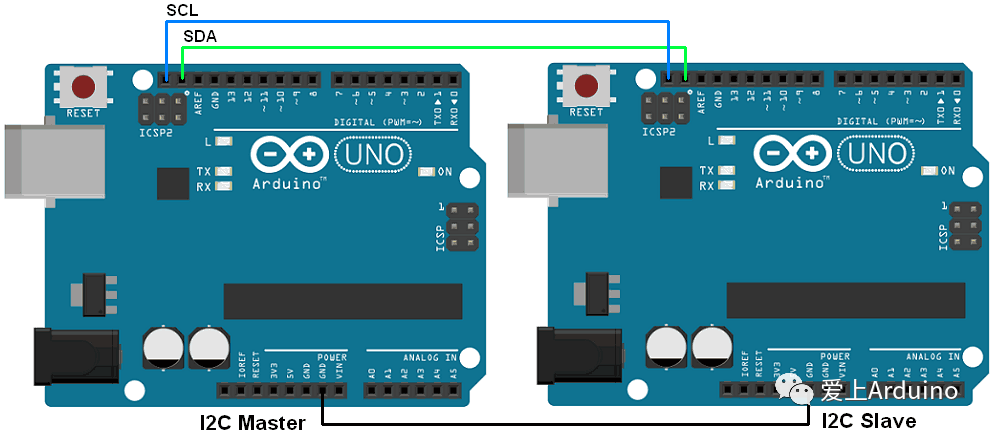
下面我們還是用兩塊Arduino來實踐一下如何利用I2C協議來傳輸數據。如圖連接好兩塊Arduino:
一臺我們作為主設備(Master),燒錄以下代碼:
#include 另一塊作為從設備(Slave),燒錄以下代碼:
#include char c = Wire.read(); /* receive byte as a character */
Serial.print(c); /* print the character */
}
Serial.println(); /* to newline */
}
// function that executes whenever data is requested from master
void requestEvent() {
Wire.write("Hi Master"); /*send string on request */
}
這樣,我們就實現了主從設備的雙向傳輸。打開主機Arduino的串口監視器我們可以看見如下的輸出:

從機Arduino的串口輸出:

I2C雖然只需要兩根線,就能支持多主機多從機的數據傳輸,但由于只有一根用于數據傳輸,它通過在“接收”和“傳輸”兩種狀態之間但切換實現了雙向傳輸,但犧牲了不少傳輸速率。I2C還有典型的開漏問題,總線需要加上拉電阻。
SPI協議
最后,我們來看一下SPI協議。SPI全稱Serial Peripheral Interface(串行外設接口),由摩托羅拉公司提出的一種同步串行數據傳輸協議。SPI類似I2C也是同步通信的協議,但是全雙工,支持數據的同時輸出和輸入。這兩個特征使SPI的傳輸速率比UART和I2C都高,這對于像SD卡、或者屏幕等數據型模塊來說,是非常具有優勢的。

SPI支持一主多從的模式,但SPI也是三種協議中需要線最多的協議,一共需要4條信號線:

但Arduino UNO默認的SPI引腳分別為D13(SCK), D12(MISO), D11(MOSI), D10(SS),其中SS是從機選擇引腳,沒有強制要求,你也可以選其他的引腳。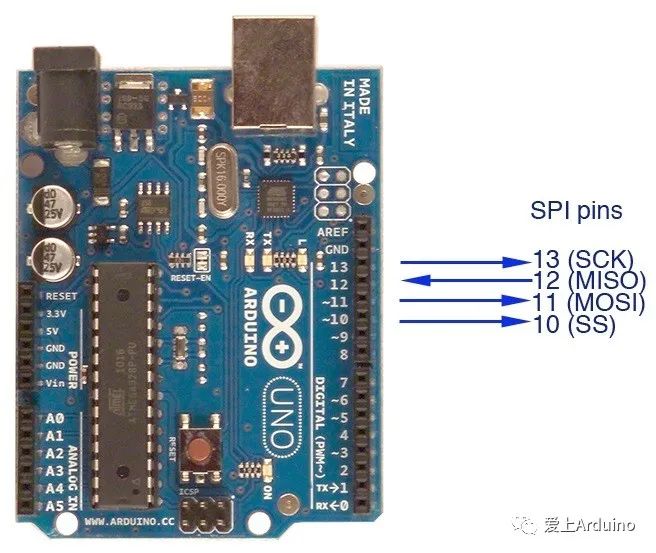
同樣,我們來實踐一下用SPI實現數據傳輸。


如圖連接好兩塊Arduino UNO。還是一塊作為主機(Master), 另一塊作為從機(Slave)。Arduino對SPI協議也做了類封裝:
https://www.arduino.cc/en/reference/SPI
主機燒錄以下代碼:
#include 從機燒錄:
#include 這樣從機就能接受到主機發過來的消息了。
總結
今天,我們粗略地介紹了一下Arduino數據通信中最常用的三種協議:UART、I2C和SPI。
| **協議
** | **通信方式
** | **通信方向
** | **信號線
** | **傳輸速率
** | **主從模式
| ** | |||||
|---|---|---|---|---|---|
| UART | |||||
| 異步 | |||||
| 全雙工 | 2線RX、TX | 最低 | |||
| 一對一 | |||||
| I2C | |||||
| 同步 | |||||
| 半雙工 | |||||
| 2線SDA、SCL,以地址選擇從機 | 低 | ||||
| 多主機多從機 | |||||
| SPI | |||||
| 同步 | |||||
| 全雙工 | 4線MOSI、MISO、SCLK、CS(或SS),以CS選擇從機 | 高 | |||
| 一主多從 | |||||
它們各自都有自己的優缺點和適用的場景,并沒有絕對的好壞,這也是這三種協議經久不衰的原因。只有了解并掌握它們,我們才能在具體的應用場景里選擇最合適的協議。當然在嵌入式世界里,還有其他很多協議,小編以后再介紹吧。如果對這三種協議的底層感興趣的朋友,也可以自己再去深入了解。
-
SPI
+關注
關注
17文章
1707瀏覽量
91697 -
I2C
+關注
關注
28文章
1489瀏覽量
123907 -
uart
+關注
關注
22文章
1237瀏覽量
101454
發布評論請先 登錄
相關推薦
局域網通信協議詳解及選擇原則
常用的串口通信協議之SPI協議簡析
單片機系統中最常用的通信協議有幾種
串口通信協議的相關資料分享
STM32的三種串口通信協議介紹

Arduino常用的三種通信協議 1
Arduino通信協議教程





 工商網監
工商網監
評論