

近日,北京小米移動軟件有限公司“足式機器人的小腿結構和足式機器人”專利獲授權。
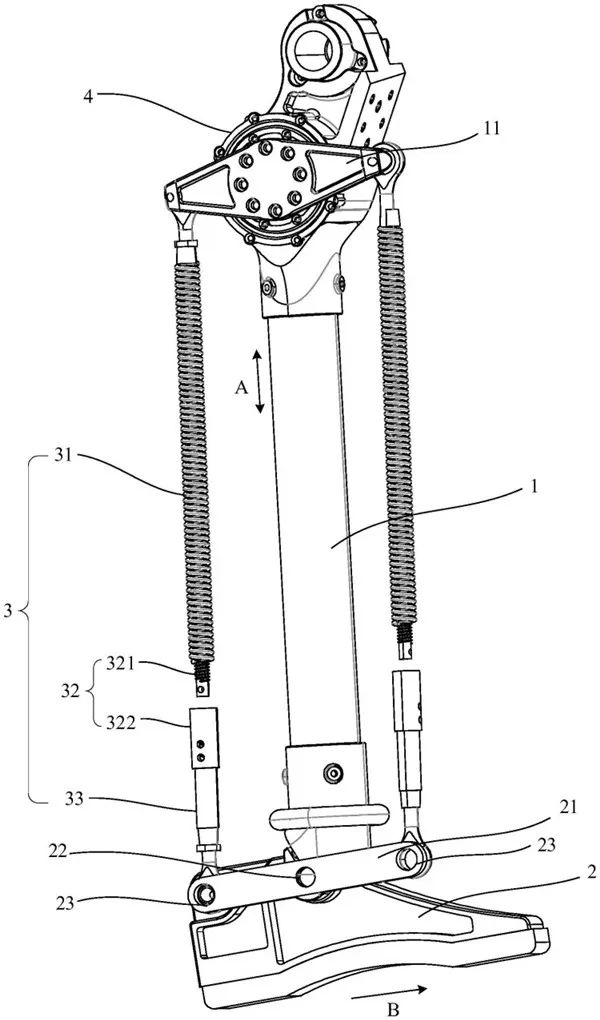
企查查專利摘要顯示,該專利屬于足式機器人技術領域,該足式機器人的小腿結構包括:腿部桿、足部和彈性連接機構,所述腿部桿的第一端與所述足部的第一位置可樞轉地相連,所述彈性連接機構位于所述腿部桿的側方,所述彈性連接機構與所述腿部桿的第二端相連,且與所述足部的第二位置相連。
通過在腿部桿的側方設置彈性連接機構,彈性連接機構與腿部桿相連,且與足部相連,在足式機器人運動的過程中,彈性連接機構可以有效地吸收足部處產生的震動,提高機器人運動的穩定性,并減小震動對機器人造成的沖擊,避免震動對機器人造成損壞。
去年8月,小米就曾發布了首款人形機器人“鐵大(CyberOne)”,身高177厘米,體重52公斤,是一款全尺寸人形仿生機器人。官方表示,鐵大背后的智能、機械能力,全部由小米機器人實驗室全棧自研完成,相比之前的機械狗,它的研發難度更高。
官方同時表示鐵大具有高情商、可感知人類情緒,視覺敏稅、可對真實世界三維虛擬重建,“小腦”發達、可實現雙足運動姿態平衡,四肢強健、動力峰值扭矩300Nm等領先能力。

審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
212文章
29069瀏覽量
210361 -
仿生機器人
+關注
關注
1文章
72瀏覽量
15436
原文標題:小米足式機器人專利曝光:前后雙彈簧設計
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
靈犀X2?(雙足人形機器人)詳細介紹
靈犀X2是智元機器人于2025年3月發布的最新雙足人形機器人,以“靈動交互、智慧協作”為核心,集運動、交互、作業三大智能于一體,標志著人形機器人
開源項目!基于Arduino控制的六足機器人
這款六足機器人的設計靈感來源于Trossen Robotics的PhantomX AX型號。原版PhantomX(已停產)售價高達1300美元,遠超我的預算,因此我決定采用廉價的180度
發表于 03-03 11:25
廣東新支柱產業“拼圖”:深圳這四家人形機器人企業受關注
年 1 月 4 日,位于廣東省深圳市,是一家專注于通用機器人研發制造的企業,聚焦于足式機器人的前沿研究,擁有感知、規劃與控制、基礎架構、硬件等多方面核心技術,推出了包括人形
發表于 02-14 00:03
?732次閱讀
四足機器人的結構、控制及運動控制
? 四足機器人憑借其獨特的地面接觸方式和對復雜地形的出色適應能力,已成為自動化與機器人工程技術研究的焦點。近年來,在結構設計、運動規劃和平衡控制等關鍵方面,四足

四足巡檢機器人特點和作用是什么
,工作人員因空間限制難以躲避,傷亡風險極高。而四足巡檢機器人以其獨特魅力闖入人們視野。它巧妙模仿動物身體結構,擁有四條靈活的“腿”,在很多場景替代了人工巡檢。 一、四足巡檢機器人的特點

廣汽輪足人形機器人,保安外賣家教樣樣來
不久前,廣汽集團對外發布了自主研發的第三代具身智能人形機器人GoMate。這款全尺寸輪足人形機器人全身擁有38個自由度,在四輪足狀態下高度約1.4米,兩輪
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
開源項目!OpenCat—— 一個全能的平價四足機器人
OpenCat—— 面向 STEM(科學、技術、工程、數學)領域的平價四足機器人。一款可編程且機動性極強的機器貓,適用于 STEM(科學、技術、工程、數學)教育以及人工智能強化服務領域。
觀看
發表于 12-16 11:44
在NVIDIA Isaac Lab中訓練四足機器人運動
由于涉及復雜的動力學,為四足機器人制定有效的運動策略是機器人領域面臨的重大挑戰。在現實世界中訓練四足機器人上下樓梯可能會損壞設備和環境,因此

Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
小米機器人公司獲亦莊國投增資,專注仿生機器人技術創新
電子發燒友網報道(文/李彎彎)近日消息,北京小米機器人技術有限公司發生工商變更,新增亦莊國投旗下北京屹唐創欣創業投資中心(有限合伙)為股東,同時公司注冊資本由5000萬元增至約5555.56萬元
小米機器人入駐小米汽車工廠,已研發鐵大、鐵蛋等機器人
6月5日消息,北京亦莊公眾號發布文章,透露小米機器人技術有限公司(下文稱小米機器人)近日在北京經濟技術開發區(亦莊)舉行了盛大的喬遷儀式。現場,小米
為什么四足機器人設計常借鑒狗的外形特征?
劉表示,機器狗是機器人的一部分,被稱為“四足動物”,意思很明顯是“四條腿”。四足機器人之所以多數被設計為狗,而不是馬或兔子,是因為其特有的膝
發表于 04-10 14:30
?655次閱讀





 工商網監
工商網監

評論