 在存在噪音的情況下改善磁卡讀取
在存在噪音的情況下改善磁卡讀取
大多數磁性讀頭數據手冊沒有完全指定頻率相關元件,并且在指定其他關鍵參數時通常含糊不清。在某些情況下,來自兩個不同制造商的兩個非常相似的磁頭的規格在指定和省略的參數方面可能大不相同。數據手冊的局限性使得設計最佳的讀卡系統變得不必要地困難和耗時。本文檔概述了克服上述缺點的策略,并提供了克服噪聲問題的指南。
介紹
任何磁卡讀卡器 (MCR) 系統最關鍵的部件之一是磁讀頭 (MRH)。刷卡時,MRH將卡磁條中存儲的數據轉換為電壓。其他MCR模塊處理轉換后的電壓以提取存儲的數據。一張卡與另一張卡之間的磁場強度差異很大,一個人到另一個人的刷卡速度差異使得設計 MCR 并非易事。
MRH數據手冊增加了MCR設計的難度,這些數據手冊沒有完全指定頻率相關元件,并且在指定其他關鍵參數時往往含糊不清。在某些情況下,來自兩個不同制造商的兩個非常相似的探頭的數據手冊規格在指定參數列表和省略參數列表中有很大差異。當您試圖最大限度地減少MCR系統中的噪聲問題時,這些差異尤其麻煩和令人不安。它們無疑使設計最佳的讀卡系統變得不必要地困難和耗時。本文概述了解決這些規范問題的策略,然后解釋了如何使用針對該任務優化的安全微控制器來優化和克服MCR中的噪聲問題。
磁條卡基礎知識
圖 1 顯示了具有三個磁道的磁條卡。一些 ISO/IEC1 標準定義了重要的卡屬性,例如物理尺寸、條紋的確切位置、磁性屬性和磁軌數據結構。軌道 1 標準由國際航空運輸協會 (IATA) 創建。軌道2標準由銀行業(美國銀行家協會,ABA)創建,軌道3標準由儲蓄行業創建。
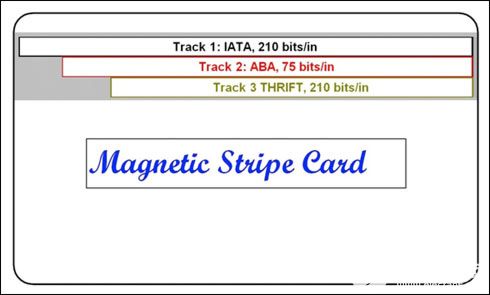
圖1.磁條卡。
雙頻相干相位(F2F)技術用于對磁條卡上的數據進行編碼。如圖2所示,二進制數據通過磁化具有不同極性的條紋區域沿軌道進行編碼。躍遷的極性是任意的,因為只有躍遷之間的相對空間意味著二進制 1 或二進制 0。
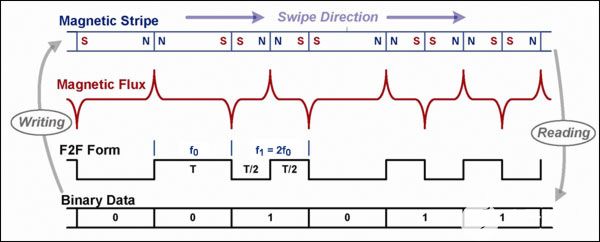
圖2.F2F 編碼和解碼波形。
二進制 0 使用兩個單位的條形磁鐵進行編碼,而一對一個單位的條形表示二進制 1。每個位在條帶上占據相同的物理長度。在其長度中間具有額外通量躍遷的位是二進制 1。
采用F2F編碼的連續信號的頻譜包含兩個基頻,f0和 f1,其中 f0是二進制 0 和 f 的方波的基本數1= 2f0是二進制 1 的方波的基礎。因此,名稱為F2F。二進制 0 波形的平均幅度是二進制 1 波形 A 的兩倍0= 2A1.
圖 3 顯示了歸一化為 f 的 F2F 編碼二進制 0 和 1 的組合頻譜0.請注意,大部分信號能量位于f之間0和 3F0.因此,要獲得包含一系列 F2F 編碼二進制 1 和 0 的矩形波形的良好近似值,恢復兩個基本波 (f0和 f1) 和 f 的三次諧波0.
圖3.F2F 編碼二進制 0 和 1 的頻譜。
此外,由于二進制模式不同,f以下還會有其他組件0.然而,我們可以從傅里葉分析中看到,隨著頻率的降低,這些分量的振幅會迅速減小。因此,帶寬從0.5f0至 3F0足以恢復 F2F 編碼的矩形波形2。
估計 f 的最小和最大比特率0和 f1,我們需要知道滑動速度范圍和軌道記錄密度。根據ISO/IEC標準,軌道1和3的記錄密度為210位/英寸(8.27位/毫米),而軌道2的記錄密度為75位/英寸(2.95位/毫米)。
用于計算 f0,分鐘我們采用支持的最慢滑動速度并將其乘以軌道 2 密度數字。對于 f1,最大我們選擇支持的最快滑動速度,并將其乘以軌道 1 或 3 的密度。
對于 2 英寸/秒至 100 英寸/秒(5 厘米/秒至 254 厘米/秒)的目標滑動速率,范圍為 f0和 f1值計算如下:
軌道 1 和 3:f0,分鐘= 0.42kbps 和 f1,最大= 42kbps
軌道 2: f0,分鐘= 0.15kbps 和 f1,最大= 15kbps
了解 f 的重要性0,分鐘和 f1,最大一旦我們有了MRH模型并研究其傳遞函數,就會變得清晰。
磁性讀頭和讀卡器基礎知識
將磁條卡刷過靜止的MRH會導致磁通量發生變化,從而產生移動的電場。因此,在MRH的輸出端感應出電壓。圖2可用于研究讀取過程。從頂部開始,經過MRH的磁條會導致磁通事件的變化,從而在MRH的輸出端子上感應出電壓。沒有任何電損耗的開路回讀電壓由眾所周知的表達式給出:3

其中:
E(/x.) = 開路電壓
K = 與磁條速度、磁頭寬度和 MRH 中線圈匝數的影響相關的常數
H(x, y) = 讀頭的場函數
M[(x - /x.), y] = 磁條材料磁化
y1 = 磁條頭部到頂部的間距
y2 = 磁條從頭部到底部的間距
顯然,上述公式非常復雜,對于電路分析和設計來說不是很直觀。我們可以使用基本原理來確定模型,如下所示。
MRH將磁能轉換為電能。由于MRH的輸入是變化的磁場,其輸出是變化的電場,因此模型應至少包含一個電感元件Lh和一個電容元件 Ch.在實際系統中,轉換過程中總是會消耗一些能量。因此,模型還必須包含一個電阻元件 Rh.在實踐中,MRH 不僅具有 Ch在其兩個端子上,但它也將具有外部阻抗Zo,例如,來自連接線、PCB 走線、IC 引腳、探頭等。
對應于第 n次諧波頻率 f 的模型n,如圖 4a 所示,然后簡化為圖 4b。3, 4, 5圖2b中二階電路的傳遞函數很容易計算如下:

圖4.等效的 MRH 模型。
請注意,上述傳遞函數不包含任何機械或磁性術語,例如滑動速度、頭部幾何形狀、頭部和條紋分離以及條紋磁性。因此,傳遞函數對于電路設計來說更加直觀。
為了進一步簡化,我們建議使用以最高系統頻率為特征的集總模型,而不是將模型限制為滑動速度。
接下來,我們比較一些領先制造商的MRH的電氣規格。表 1 列出了圖 4b 模型所需的關鍵規格。請注意不同的細節量。雖然制造商A和C都指定了幾個電氣參數,但制造商B只指定了一個:峰峰值頭讀數電平。
| 參數 | Manufacturer A | Manufacturer B | Manufacturer C |
| VO(P-P)(毫伏) | 20 | 19 | 35 |
| Lh(兆赫) | 25 | — | 110 |
| Ch(pF) | — | — | — |
| Rh(Ω) | 110 | — | 280 |
關于缺少的信息,可能會出現以下問題。
磁頭電感(Lh).L 如何h在更大的頻率范圍內表現?L 如何h在承載非指定電流時的行為?
磁頭直流電阻 (Rh).整個頭部端子施加的電壓等級是多少?
磁頭讀取輸出電平(VO(P-P)).使用什么類型的測試卡?刷卡速度是多少?頭部的負荷是多少?
磁頭電容 (Ch).兩個頭部端子之間的電容是多少?它會隨著頻率而變化嗎?
為了理解上述參數的重要性,我們檢查傳遞函數的分母,并通過將其設置為零來找到其根:

為了使表達式保持簡單并更好地理解二階行為,幾本網絡分析書籍6, 7使用標準形式編寫方程式。一個標準使用的形式是:
S2 + 2α × S + Ωo2 = 0
其根源是:

其中:
α是阻尼衰減:
ωo是共振頻率:
因此,取決于 α 和 ω 的值o,自然反應的根源可以是真實的、復雜的或虛構的。對于熟悉其他標準形式的讀者,我們現在將阻尼系數定義為 ζ = α/ωo(注意:品質因數Q = 1/2ζ)并使用其他標準形式:
S2 + 2ΖΩo× s + ωo2 = 0
其根源是:

當對系統施加非零強制函數(如階躍、斜坡或脈沖)時,根在 s 平面中的位置直接影響建立行為。圖5顯示了在t = 0時施加階躍時各種ζ值的建立行為。具體而言,建立行為分類如下:
ζ > 1 overdamped
ζ < 1 ?underdamped
ζ = 1 critically damped
ζ = 0 undamped or oscillatory
圖5.各種ζ值的MRH輸出電壓。
從圖5中,我們觀察到在欠阻尼系統中會發生振鈴,這可能導致由于假峰值和假過零而導致讀數錯誤。但是,如果系統嚴重過阻尼,則建立緩慢可能會產生時序誤差,峰值偏移可能會產生讀數誤差。在分析了MRH的時域行為之后,我們接下來看看它的頻域行為。
圖6顯示了傳遞函數的頻率響應,Tn(s),歸一化為其共振頻率 ωo.當我們接近系統諧振頻率時,我們觀察到峰值。這是由于圖4b所示電路的固有性質,即并行RLC。根據滑動速度,此峰值也可能導致讀取錯誤。
圖6.傳遞函數的頻率響應。
回想一下,當嘗試恢復 F2F 編碼的二進制數據時,我們需要兩個基本頻率,f0和 f1,至少是f的三次諧波0.從圖3可以看出,大部分信號能量都在0.5f附近0至 3.5F0,而一小部分在6F左右0.
如果獲得更高的諧波,恢復的F2F波形會發生什么情況?從傅里葉分析中我們知道,恢復的波形形狀會隨著較高諧波系數的大小變化而變化。因此,在某些情況下,圖5所示的增益峰值可能會達到3次和6次諧波被放大到恢復信號嚴重失真的水平。任何導致假峰和過零的失真都會導致讀數錯誤。
圖7強調了上述觀點,圖<>以數學方式顯示了高諧波下兩種不同增益的MRH輸出電壓:藍色常亮表示單位增益,紅色表示增益為<>。黑色虛線是 ZX 遲滯極限。顯然,隨著增益加倍,紅色的MRH輸出信號顯示出更多的失真、假峰值和過零。
圖7.增益峰值引起的MRH輸出電壓失真。
此外,MRH不僅會因刷卡速度的變化而受到干擾。它還會看到整個系統中可能存在的更高頻率的干擾,例如高頻系統時鐘。由于增益峰值,這也可能導致信號失真和可能的讀數錯誤。因此,為了設計最佳的讀卡系統,了解MRH在刷卡速率之外的頻率行為至關重要。必須至少在最高系統頻率下表征MRH頻率行為。
表征各種讀頭
我們 使用 市售 阻抗 / 增益 相位 分析 儀 來 查找 不同 制造 商 的 多個 MRH 的 等效 電路。表征包括基于DeepCover安全微控制器(MAXQ1740)的MCR中使用的單軌、雙軌和三軌MRH。由于12MHz是MAXQ1740的最大系統時鐘頻率,因此每個MRH的特性范圍為100Hz至12MHz(100Hz是分析儀的極限)。表2顯示了三軌MRH的參數平均值。?
| Parameter | MRH 1 | MRH 2 | MRH 3 | MRH 4 |
| Lh(兆赫) | 13.67 | 58.09 | 13.20 | 57.43 |
| Ch(pF) | 22.15 | 31.11 | 20.60 | 16.97 |
| Rh(Ω) | 146.78 | 234.57 | 145.72 | 214.51 |
分析測量參數
比較表2中的參數,我們發現MRH 1和MRH 3非常相似。它們參數之間的相對差異為:ΔLh~ 3.6%, δrh~ 0.7%, 和 ΔCh~ 7.5%。對于 MRH 2 和 MRH 4,其參數的相對差異為:ΔLh~ 1.2%, δrh~ 9.4%, 和 ΔCh~ 83%。由于 Ch影響α和 ωo,對于類似的條件,我們可以預期 MRHs 1 和 3 的行為非常相似。我們可以預期MRHs 2和4的行為會低于它們的共振頻率,但隨著頻率接近和超過它們各自的共振點,它們會發生變化。
當我們繪制表征MRH的傳遞函數頻率響應時,最后兩點變得很明顯,如圖8所示。圖8中的負載為1G,阻尼比為0.03。MRHs 1 和 3 的圖幾乎相同,而 MRHs 2 和 4 的圖顯示諧振頻率差異越來越大。如前所述,幅度的增加可能會導致讀取錯誤。
圖8.MRH傳遞函數與1GΩ外部負載下的頻率的關系(ζ = 0.03)。
圖9顯示了150kHz至300kHz頻率范圍內的MRH傳遞函數,即對應于最大刷卡速率3in/s(6cm/s)的100次和254次諧波。我們可以看到,隨著滑動速率的增加,MRH傳遞函數幅度值也會增加。這里的主要問題是,如果獲得更高的諧波超過一個點,可能會出現錯誤的過零和峰值,如圖7所示。此外,如果大于最大允許的信號出現在磁頭和讀卡器輸入之間的接口上,則可能會發生讀取錯誤。
有兩個因素會導致信號較大。首先,更快的滑動會增加磁通量變化的速度。根據法拉第定律,這會產生更大的電感電壓,從而導致更大的電感電流。其次,根據歐姆定律,流過較大阻抗的較大電流會產生較大的輸出電壓。
在刷卡速率范圍內,我們需要將峰值限制在小于或等于20,這是MAXQ1740磁卡讀卡器的最大和最小增益之比。圖9顯示,MRHs 1和3的阻抗變化小于20,但MRH 2和MRH 4的變化接近30,超過了20的限制。
圖9.MRH傳遞函數與3次和6次諧波頻率范圍的關系。
如果在MRH的輸出端增加一個阻尼電阻會發生什么?圖10顯示了三個任意不同的外部負載值的傳遞函數圖:100kΩ、10kΩ和1kΩ。我們在圖10中看到,對于低阻值的外部電阻,與圖9所示相比,峰值有所降低。請注意,對于1kΩ負載,所有四個MRH的三次諧波增益都會嚴重降低。這可能是一個問題。對于 3k 負載,對于 MRHs 100 和 2,增益在 3 次諧波處達到峰值,而對于 MRHs 3 和 2,增益在 3 次諧波處達到峰值。這里的重點是我們不能隨意選擇 Ro值。
圖 10.不同外部負載值的MRH傳遞函數。
使用外部電阻器 R 時o在MRH端子上,確保阻尼比(ζ)盡可能接近單位非常重要。圖 11 繪制了 ζ 與 R 的關系圖o對于四種特征的MRH。對于 ζ = 1,我們需要 RoMRHs 12 和 1 的≈ 3kΩ;Ro≈ MRH 22 為 2kΩ;和 RoMRH 28 的≈ 4kΩ。圖12顯示了具有最佳負載值的傳遞函數。將圖12與圖10進行比較,我們注意到增益在三次諧波處沒有達到峰值,而是接近單位。
圖 11.MRH 阻尼系數 (ζ) 與外部電阻 (Ro).
圖 12.MRH傳遞函數可實現最佳外部負載。
雖然最大 Ro由 ζ = 1 設置,最小值 Ro值取決于支持的最小信號和磁頭直流電阻,Rh.作為一般規則,保留 Ro≥ 5Rh使 Ro與 R 并行h不會使磁頭輸出信號衰減超過20%。
這里有幾個關鍵點需要記住。首先,由于并聯RLC,傳遞函數在諧振頻率ωo.因此,將此峰值限制在刷卡速率的3次和6次諧波對應的范圍內,例如,對于150kHz至300kHz的刷卡速率范圍,42kHz至50kHz。其次,可以通過放置R來調整系統行為o穿過讀頭器的終端。更改 Roζ更改阻尼比。最后,選擇 Ro值使系統臨界阻尼,并讓引線布線和PCB布線設置Co價值。
優化讀卡
現在使用一種解決MRH規格差異的方法,我們可以提高讀卡性能。我們的重點是減少主要影響過零(ZX)的噪聲的影響。在整個頻率范圍內表征MRH模型后(注意:表征必須包括引線和PCB布線),我們遵循以下步驟。
第 1 步。選擇一個 Ro值以獲得適當的阻尼比并限制增益峰值。
通常,目標應是臨界阻尼到略微過阻尼的系統。作為例外,如果在某些情況下,三次諧波的增益降至一半以下,那么我們可以通過稍微欠阻尼的系統來均衡增益。
欠阻尼系統可能會引入輸入信號振鈴產生的噪聲。振鈴噪聲會對ZX產生不利影響,但也可能導致增益峰值引起的假峰值。
保持 Ro≥ 5Rh最大 Ro設置ζ = 1。
第 2 步。在嘈雜的印刷電路板(PCB)上,它有助于使系統過阻尼,尤其是軌道2(T2)。
T2 有 40 個數字,而 T79/T1 有 3 個字母數字字符。
在T2上,噪聲會影響ZX的峰值之間存在較長的間隙。
過阻尼集成了 T2 信號。信號接近鋸齒波形,如圖13所示。過阻尼通過過濾掉高頻毛刺來幫助ZX。
保持 Ro≥ 5Rh使磁頭衰減保持在20%以下。
需要注意的是:過度阻尼的系統可能會由于建立緩慢和峰值偏移而導致誤差。
第 3 步。如果使用較便宜但噪聲較大的讀頭,則通過降低輸入信號來克服噪聲,而不會影響阻尼比。
選擇合適的 Ro.
除以 Ro分成更小的段,使總 Ro與步驟 1 中相同。
使用適當的抽頭獲取所需的信號分頻。
有幾種方法可以做到這一點,如下面的實際示例部分所述。
第 4 步。當MAXQ1740的讀頭輸出超過300mV時Q-1,發生信號的內部削波。這種剪切也可能導致讀取錯誤。
使用步驟 3 中描述的方法減少信號。
實例
輸入信號和降噪
假設優化的輸出電阻值為Ro.
目標:信號減少 25%。
使用一個 0.25 × Ro和一個 0.75 × Ro串聯在頭上。然后 0.75 × Ro系在頭部共銷側。將中點綁定到輸入。
使用四個 0.25 × Ro串聯在頭上。將中點綁定到輸入。
目標:信號減少 75%。
使用一個 0.25 × Ro和一個 0.75 × Ro串聯在頭上。然后 0.25 × Ro系在頭部共銷側。將中點綁定到輸入。
使用四個 0.25 × Ro串聯在頭上。將中點上方的一個水龍頭連接到輸入。
阻尼系數的影響
接下來,我們考慮使用基于MAXQ1740的MCR刷卡時的各種阻尼因素及其對實際信號行為的影響。MRH 2用于測試。關于使用的測試卡,有兩件重要的事情需要注意。首先,卡可從Q-Card購買,并遵循ISO / IEC 7811至7816標準。其次,卡信號幅度指定為標稱電平的百分比。因此,40%的卡意味著最大輸出電平是標稱ISO水平的40%。
在我們獲得MRH模型之前,需要費時且令人沮喪的猜測來確定外部電阻的正確值。使用此處提供的模型,我們通過使用與我們的模型預測相匹配的13.5kΩ外部電阻解決了噪聲問題。圖13顯示了過阻尼行為,而圖14顯示了臨界阻尼行為。比較圖11和圖12,我們注意到與臨界阻尼行為相比,過阻尼情況的建立和峰值偏移緩慢。如前所述,緩慢建立和峰值偏移都可能導致時序誤差,從而導致讀取誤差。
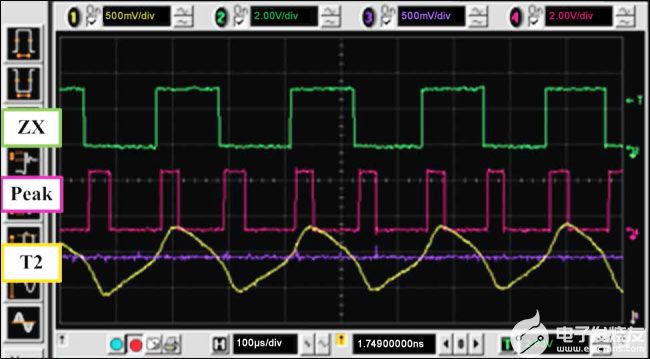
圖 13.過阻尼響應。T2 用于使用 40% 卡和 R 手動刷卡o= 1.5kΩ。
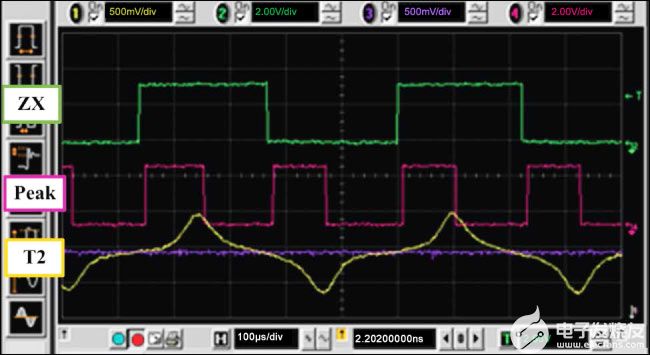
圖 14.臨界阻尼行為。T2 用于使用 40% 卡和 R 手動刷卡o= 13.5kΩ。
結論
當然可以使用麥克斯韋場方程、MRH 的幾何形狀和邊界條件來預測 MRH 輸出電壓行為。然而,這種方法非常復雜,對電路分析、設計和調試的見解有限。相反,我們建議首先表征MRH,然后使用基本電路理論和簡單的電路模擬器來分析MCR行為。
使用本文中介紹的方法,可以在設計階段的早期或決定選擇哪種MRH時預測和預防潛在問題。例如,設計人員現在可以預見,在欠阻尼系統中,由于假峰值和假過零,可能會發生讀數錯誤。振鈴和過度增益峰值(在刷卡速度的3次和5次諧波附近)都可能產生假峰值和過零。相反,如果系統嚴重過阻尼,則由于峰值偏移,可能會發生時序誤差。
此處介紹的方法對于提高使用特定讀頭的現有讀卡器系統的性能也很有用。例如,在噪聲系統中,可以首先使用多個串聯外部電阻使系統嚴重阻尼,然后從適當節點分接MRH輸出以分壓MRH輸出電平。
最后,在基于MAXQ1740微控制器的實際讀卡器系統中驗證了該方法。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7560瀏覽量
151496 -
讀卡器
+關注
關注
2文章
417瀏覽量
39380
發布評論請先 登錄
相關推薦
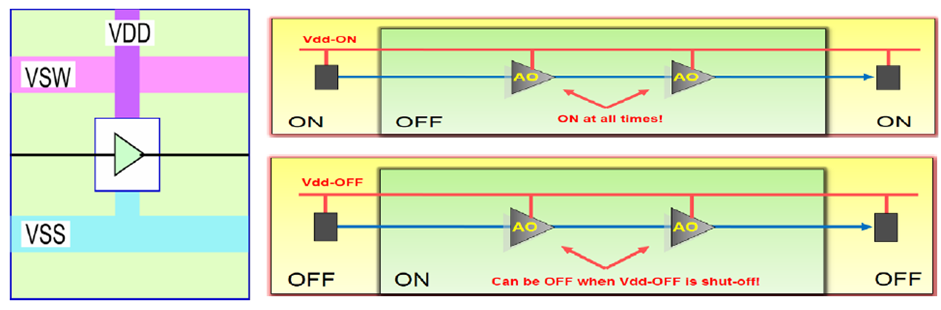
什么是always on buffer?什么情況下需要插always on buffer?
vc707 ddr3接口在某些情況下讀取數據與寫入數據不匹配
聯鎖安全房門中磁卡識別原理圖
基于霍爾傳感器在磁卡信讀取信息的應用指南


什么情況下使用示波器
資深廠家揭秘棒形線圈電感什么情況下會有噪音

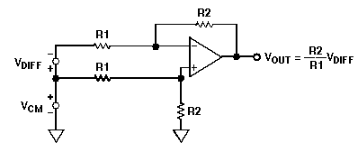
在存在大共模電壓的情況下測量小差分電壓
什么情況下選用工業主板

什么情況下需要使用微機消諧裝置
為什么短路情況下電流回上升?
電機在什么情況下需要選擇圓柱滾子軸承?
為什么電容在低電壓情況下會發熱






 工商網監
工商網監
評論