 墨魚眼睛啟發的人工視覺,可在不均勻的照明條件下實現高質量成像
墨魚眼睛啟發的人工視覺,可在不均勻的照明條件下實現高質量成像
人工視覺可以在移動機器人中發揮關鍵作用,包括自動駕駛汽車,以監控周圍環境并檢測接近的物體以避免碰撞,這可以部分或完全替代在不斷變化的光線條件下易受傷害的人類視覺。對于此類應用,物體的高可檢測性很重要,這通常需要高對比度和高敏銳度的成像系統。基于相機的視覺系統因其低成本、小尺寸和單次圖像捕獲能力,支持圖像檢測。然而,有限的圖像對比度,特別是在垂直不均勻的照明條件下,由于上視野中的強烈陽光散射和從周圍玻璃表面反射的隨機偏振太陽光噪聲,嚴重阻礙了高質量成像,從而導致物體可檢測性低。而汽車駕駛員可以通過遮陽板和太陽鏡物理阻擋強烈的上部陽光并減輕偏振噪音。這有用于移動機器人和自動駕駛汽車的人工視覺系統利用基于軟件的方法來解決這種不利的光照條件。然而,系統應處理的大量視覺信息需要很高的計算能力和能耗。因此,需要適當的硬件解決方案來處理非均勻的光條件,最大限度地減少偏振光噪聲,并減少數據處理量。
同時,自然界中的視覺系統激發了具有獨特功能的人工視覺系統的發展。例如,水生和兩棲動物已經進化到具有針對其棲息地優化的眼睛,這些都激發了各種人工視覺系統。受魚眼全景成像能力的啟發,開發了由單中心透鏡和半球形硅納米棒光電二極管陣列組成的小型化寬視場(FOV)成像系統。受象鼻魚(Gnathonemus petersii)的視網膜結構的啟發,它可以增強在低光條件下收集的光強度,已經開發出一種由微量光收集器組成的光敏增強劑。受螳螂蝦(如齒趾蝦)的高光譜和極化成像策略的啟發,已經開發出一種由偏振敏感有機光電探測器和折疊聚合物緩凝劑組成的圖像傳感器。受生活在潮間帶地區的提琴蟹(Uca arcuata)的扁平角膜微透鏡和柄眼結構的啟發,已經開發出一種具有360°FOV的全天候成像系統,該系統由多層扁平微透鏡和球形硅光電二極管陣列組成。盡管為開發各種生物啟發的人工視覺系統做出了這樣的努力,但尚未開發出一種可以平衡垂直不均勻照明,同時在由于隨機偏振陽光的高噪聲條件下實現高對比度和敏銳度的系統。
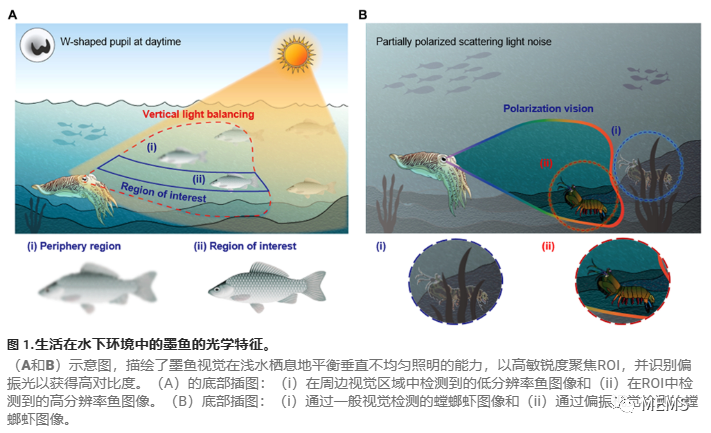
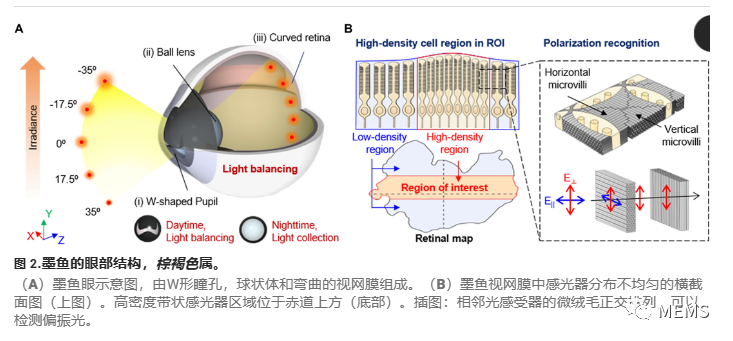
在這種情況下,墨魚(棕褐色屬)已經進化為具有針對垂直不均勻照明和偏振光檢測優化的高敏銳度視覺系統(分別為圖1,A和B),激發了移動機器人的高性能人工視覺。墨魚具有獨特的眼睛結構,由W形瞳孔(圖2A i),單個球形晶狀體(圖2A ii)和彎曲的視網膜(圖2A iii)組成,具有高密度帶狀感光器區域(圖2B)和偏振敏感光感受器(圖2B,右插圖)。在白天,獨特的W形瞳孔通過平衡垂直不均勻的照明使墨魚具有高對比度的視力(圖1A,紅色虛線區域)。視網膜中的高密度帶狀感光器區域允許其感興趣區域(ROI)具有高視力(圖1A,ii與i)。這種帶狀感光器分布是檢測地平線附近接近物體的最佳選擇。此外,光感受器的水平或垂直堆疊的微絨毛允許墨魚通過提取從目標物體反射的偏振光并過濾掉隨機偏振的背景噪聲來有效地識別偽裝的獵物(圖1B,ii與i),從而增強視覺對比度。
受墨魚視覺系統這種獨特的結構和功能特征的啟發,研究人員提出了一種人工視覺系統,該系統可在垂直不均勻的照明條件下實現高對比度和高敏銳度成像,以實現高性能人工視覺,從而有望在移動機器人中應用。人工視覺系統中的W形瞳孔通過減少垂直FOV頂部的入射光來補償不均勻的垂直光分布。此外,圓柱形硅光電二極管陣列(c-Si-PDA)包括高密度帶狀像素區域,可在ROI中實現高敏銳度成像。集成在c-Si-PDA表面的柔性碳納米管(CNT)-偏振膜(FCPF)在可見光波長范圍內保持~78%的平均偏振度,從而實現偏振敏感成像。通過集成這些光學和電子元件,開發了一種人工視覺系統,該系統可以平衡不均勻的光分布,同時實現高對比度和敏銳度。

論文信息:
https://www.science.org/doi/10.1126/scirobotics.ade4698
審核編輯 :李倩
-
成像系統
+關注
關注
2文章
196瀏覽量
13939 -
光電探測器
+關注
關注
4文章
266瀏覽量
20521 -
人工視覺
+關注
關注
0文章
10瀏覽量
2581
原文標題:墨魚眼睛啟發的人工視覺,可在不均勻的照明條件下實現高質量成像
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論