 一種基于微分Mach-Zehnder干涉儀的光纖應變速率傳感器
一種基于微分Mach-Zehnder干涉儀的光纖應變速率傳感器
01導讀
光纖應變傳感器已經被廣泛研究和應用,可通過光纖應變實現物體形變的直接測量。而光纖應變速率傳感器,則關注于光纖或物體形變的應變微分(即應變速率或應變率)的直接測量。在地球物理科學和地震科學方面,應變速率可以用于反映地殼形變速率、地震活動構造以及地質構造情況。
與地殼運動有關的應變速率可以通過全球定位系統(GPS)、合成孔徑雷達干涉測量技術(InSAR)以及DAS這幾種方式進行測量。但是,這些測量方式屬于間接測量,且依賴大量數據的記錄和分析,技術手段相對復雜。目前,直接測量應變速率的傳感器或傳感技術鮮有報道,遠不及光纖應變傳感技術的普及。
近日,中國科學院半導體研究所張文濤研究員團隊提出一種基于微分干涉儀的光纖應變速率傳感器。它可以通過微分干涉儀直接測量應變速率,將應變速率轉換為光學相位。采用長12.1 m的傳感光纖進行實驗,結果表明,光纖應變速率傳感器在工作頻帶內具有65.50 dB的平坦靈敏度、納米量級(nε/s)的分辨率和優于95 dB的動態范圍。該傳感器的高分辨率和平坦幅頻響應,優于DAS在火山監測和微地震探測中的應變速率測量能力,表明該傳感器有潛力應用于地球物理監測和地震事件探測。
02研究背景
在地球物理科學和地震科學方面,應變速率在大地應變測量、構造研究和地殼形變觀測中具有重要意義,有助于研究抗震變形、地震活動性和地震危險性評估。當前,可以通過全球定位系統(GPS)、合成孔徑雷達干涉測量技術(InSAR)以及DAS這幾種方式來測量與地殼運動有關的應變速率。但是,這些方式都無法實現應變速率的直接測量,且依賴于大量數據的記錄和分析。一些可以直接測量應變速率的傳感器已經被報道,如壓電式、可變磁阻變壓器式以及光纖多普勒式,它們被用于高層建筑或結構的主動控制。盡管它們表明直接測量應變速率比應變微分具有更高信噪比,但缺少對靈敏度、分辨率和動態范圍等傳感器性能的進一步研究。此外,依然缺少可用于在地球物理學和地震學中直接測量應變速率的傳感器。
本研究提出了一種基于微分Mach-Zehnder干涉儀的光纖應變速率傳感器(FOSRS)。利用微分干涉儀的光路結構,通過一根傳感光纖實現對應變速率的簡單、直接和高分辨率測量,以將FOSRS應用于地球物理監測和地殼變形觀測。而且,首次系統性研究了應變速率傳感的靈敏度、分辨率和動態范圍。
03創新研究
3.1 傳感原理
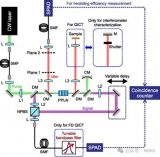
FOSRS的系統配置如圖1所示,1×2耦合器和法拉第旋轉鏡之間的傳感光纖用于直接感測應變速率,不平衡Mach-Zehnder干涉儀和法拉第旋轉鏡組成了微分干涉儀。當應變速率導致傳感光纖長度拉伸,從不平衡Mach-Zehnder干涉儀進入傳感光纖的兩束光,其光學相位均受到應變速率的調制。當它們被法拉第旋轉鏡反射,回到干涉儀中,并在3×3耦合器處發生干涉,干涉光相位變化是受應變速率調制的兩個光學相位之差。注意,只有分別完成順時針傳輸和完成逆時針傳輸的光束才能滿足干涉條件。由于兩個光學相位受調制的時間差極小(和干涉儀臂長差有關),干涉光相位變化和應變速率調制的相位微分呈線性相關。由此,通過微分干涉儀的光路,構建了干涉儀光相位變化和應變速率之間的直接關系。本研究中采用基于3×3耦合器的反正切解調算法,通過解調干涉光的相位變化,實現應變速率的直接測量。
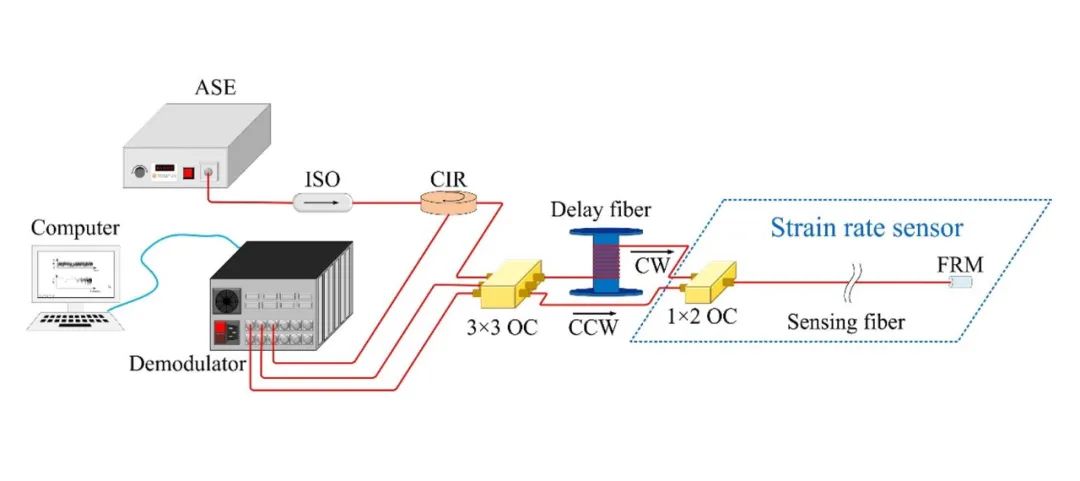
圖1 光纖應變速率傳感器系統配置 圖源:Photonics Research(2022)
3.2 靈敏度研究
理論研究表明,FOSRS的靈敏度不是信號頻率的函數,在工作頻帶上其幅頻響應是一致的。搭建了如圖1所示的實驗系統,采用相位拉伸器(PZT)拉伸傳感光纖以施加應變速率。傳感長度為12.1 m的光纖應變速率傳感器,其測量靈敏度在0.1 Hz~1000 Hz幾乎是平坦的,與理論靈敏度曲線具有相同的平坦趨勢。
這表明,在任何工作頻帶上,FOSRS對應變速率的響應能力是相同的。實驗測得的平均靈敏度為2988.23 rad/(ε/s)(即69.50 dB),最大波動為0.61 dB。測量靈敏度與理論靈敏度68.19 dB之間相差1.32 dB。從測量角度來看,差異主要來自光纖長度測量、光源波長變化、PZT拉伸光纖帶來的誤差。這種差異被認為是允許的。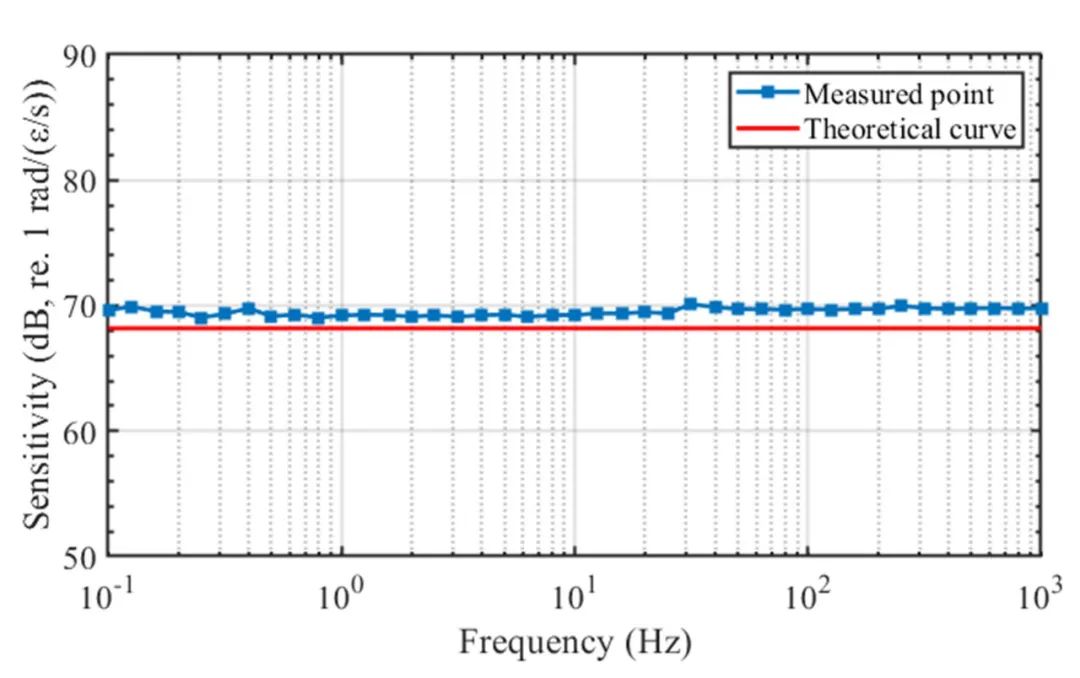
圖2 測量靈敏度與理論曲線的比較 圖源:Photonics Research(2022)
3.3 分辨率研究
FOSRS的相位本底噪聲決定了應變速率分辨率。由ASE光源不同頻率的隨機跳動引起的相對強度噪聲(RIN)是限制FOSRS分辨率的重要因素,RIN可通過基于3×3耦合器的反正切解調算法,轉化為等效相位噪聲。 在溫度相對穩定、振動干擾較小的地下室測試了FOSRS的噪聲和分辨率。記錄一分鐘相位,其PSD如圖3所示,用黑線表示。測試了探測器三個通道的RIN,并計算了RIN的等效相位噪聲,如圖3中紅線所示。RIN的等效相位噪聲接近測量的相位本底噪聲。在1 kHz時,以2988.23 rad/(ε/s)的測量靈敏度計算,RIN限制的應變速率分辨率為0.94 nε/s/√Hz,接近實測動態分辨率1.58 nε/s/√Hz。因此,降低RIN是提高FOSRS動態分辨率的主要途徑。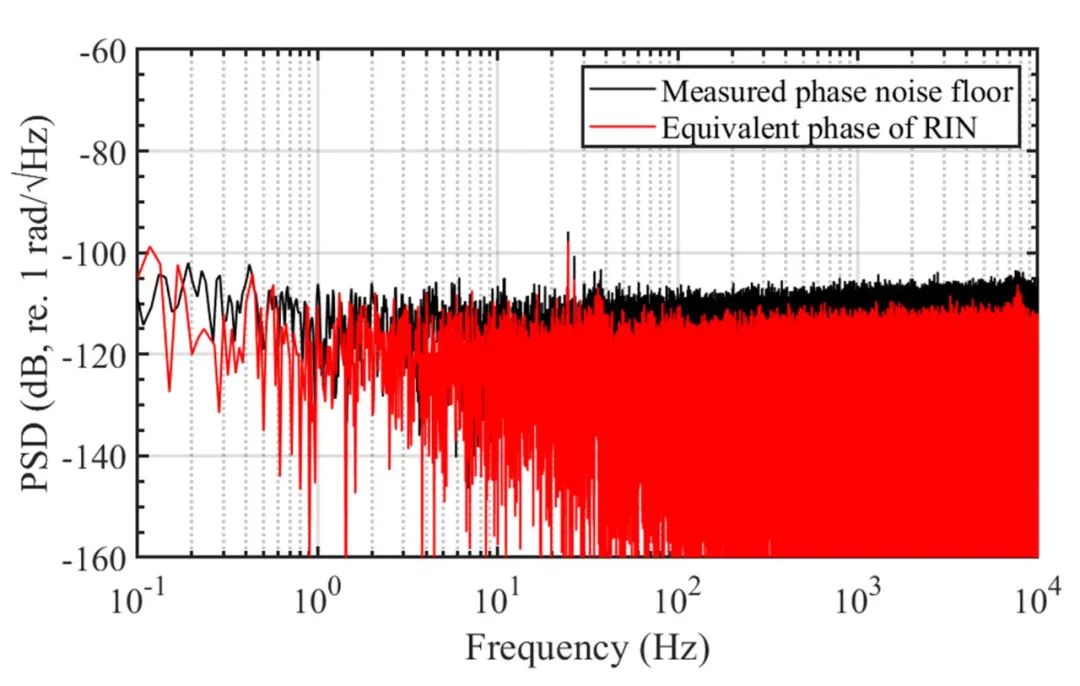
圖3實測相位噪聲和RIN的等效相位噪聲的比較 圖源:Photonics Research(2022)
此外,還探討了FOSRS的靜態分辨率。記錄10分鐘內的相位變化。由于感興趣的是靜態應變速率測量,因此使用截止頻率為1 Hz的低通濾波來處理記錄的相位。結果如圖4所示。記錄相位的標準偏差計算為2.0192×10-5rad。使用平均測量靈敏度,靜態應變速率分辨率為6.76 nε/s。使用PZT拉伸傳感光纖,該FOSRS可以在0.05 Hz頻率下測量到23.14 nε/s的應變速率方波信號,如圖5所示,這表明該FOSRS具有測量nε/s靜態應變速率的能力。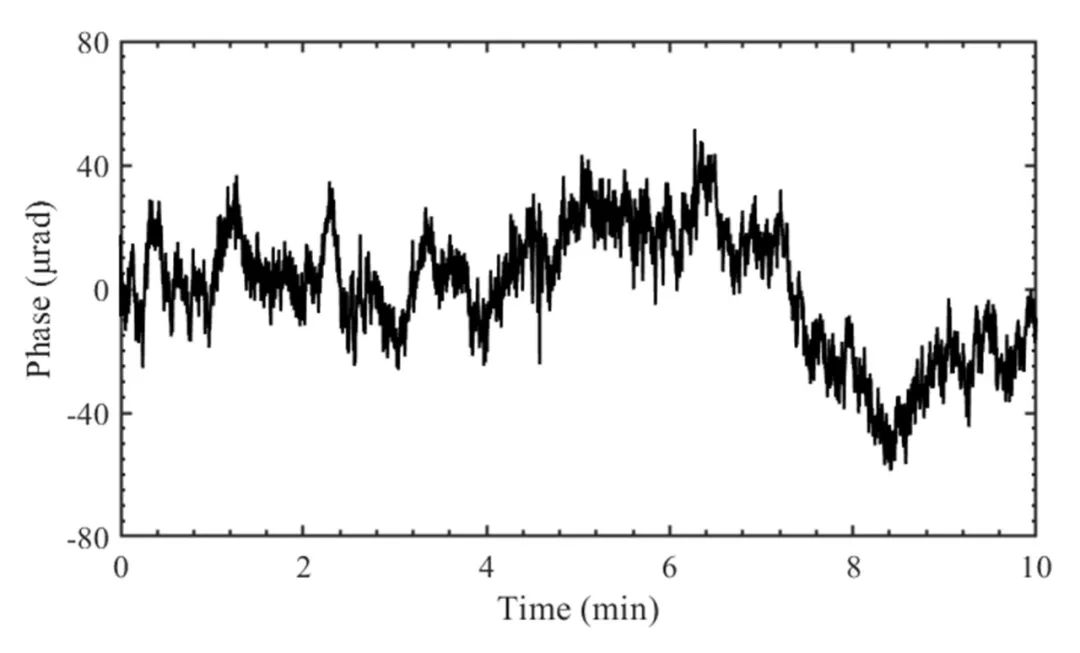
圖4記錄的10分鐘相位噪聲 圖源:Photonics Research(2022)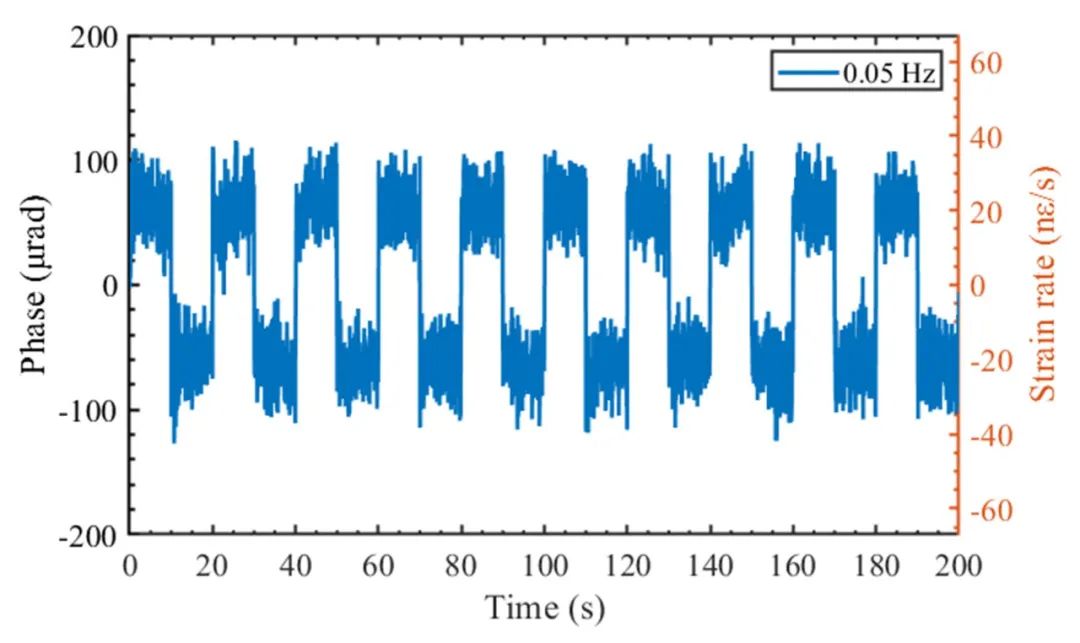
圖5記錄的0.05 Hz的方形信號 圖源:Photonics Research(2022)
3.4 動態范圍研究
FOSRS的動態范圍可以通過推斷最大可測應變速率來分析。微分干涉儀中兩束光的光程差應小于ASE光源的相干長度。理論上低相干光源的相干長度為λ2 0/Δλ。本實驗中采用C波段ASE光源(中心波長1545 nm,譜寬33.377 nm),低相干長度對應的最大可測應變速率約0.1 ε/s。結合FOSRS的靜態分辨率為6.76 nε/s,靜態測量下,動態范圍是有望達到140 dB以上。
在動態測量中,最大可測應變速率受總諧波失真的影響。考慮總諧波失真為10%,可測的應變速率為最大值。結合圖3的功率譜密度,可以給出FOSRS的動態范圍,是隨著信號頻率的增加而減小,如圖6所示。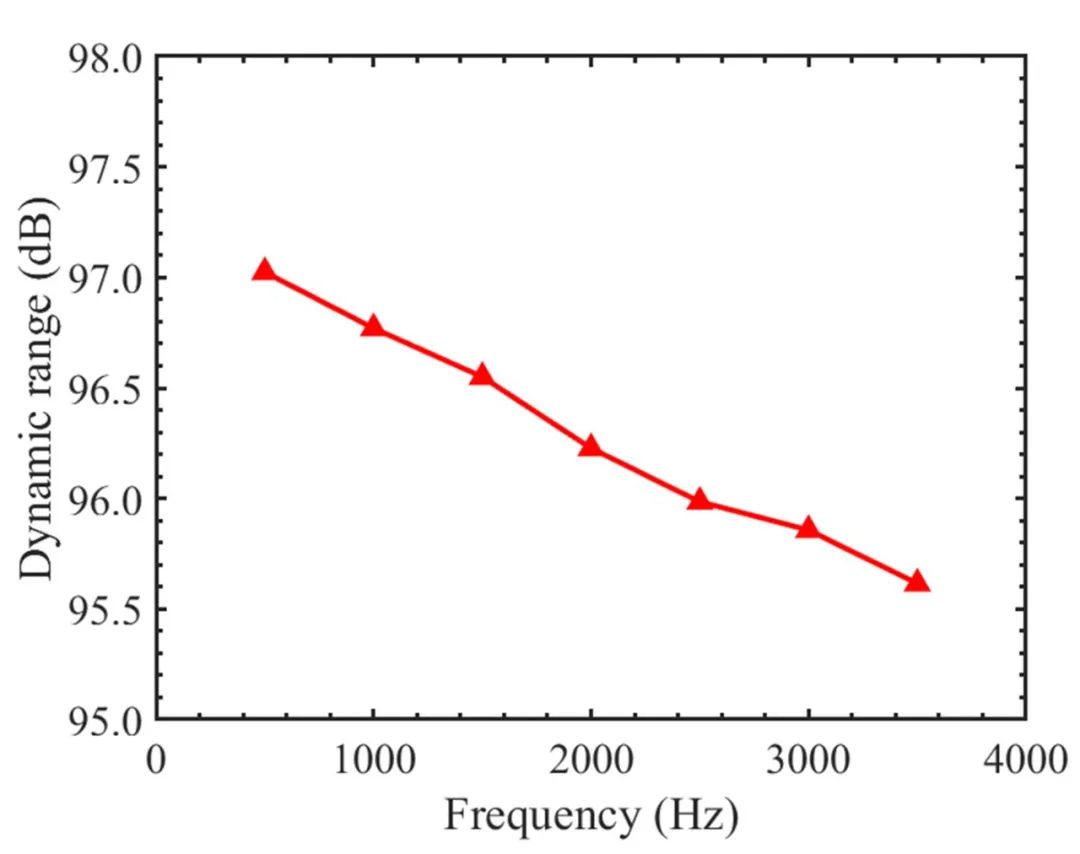
圖6動態測量時的動態范圍 圖源:Photonics Research(2022)
04應用與展望
本研究提出一種基于微分Mach-Zehnder干涉儀的FOSRS,通過簡單的傳感光纖可以實現直接、高分辨率的應變速率傳感。在工作頻帶內,采用12.1 m長傳感光纖所研制的FOSRS具有平坦的靈敏度響應、納米量級的應變速率分辨率、優于95 dB的大動態范圍。為了拓展在地殼形變中的長基線測量,采用了25.277 km長的傳感光纖研制FOSRS,測試了其10分鐘內相位噪聲標準差為9.1180×10?5rad,對應靜態分辨率為17.01 pε/s。與表1所列舉的DAS相比,FOSRS的應變速率分辨率優于DAS噪聲,優于DAS在火山監測和微地震探測中的應變速率測量能力,表明該傳感器有潛力應用于地球物理監測和地震事件探測。
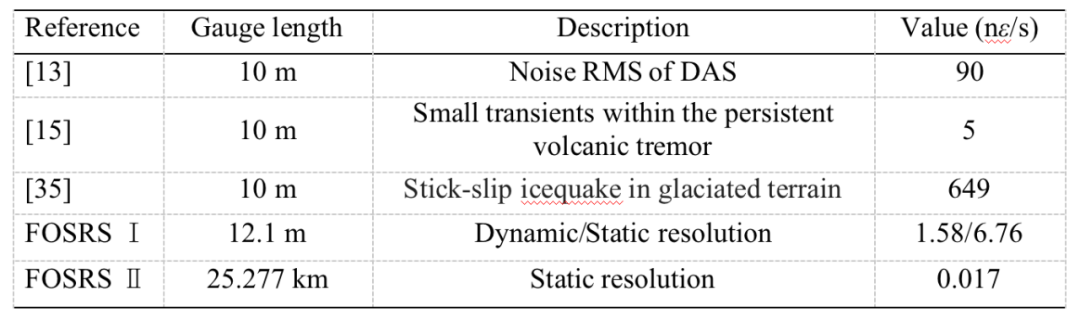
表1FOSRS和DAS的比較
審核編輯:劉清
-
變壓器
+關注
關注
159文章
7483瀏覽量
135312 -
光纖傳感器
+關注
關注
16文章
309瀏覽量
34741 -
DAS
+關注
關注
0文章
107瀏覽量
31081 -
可變磁阻
+關注
關注
0文章
6瀏覽量
5932 -
應變傳感器
+關注
關注
0文章
63瀏覽量
4698
發布評論請先 登錄
相關推薦
用于光學測量的菲索干涉儀
干涉測量
馬赫澤德干涉儀
天文光干涉儀
安泰ATA-2021B高壓放大器在光纖超聲傳感器中的應用


白光干涉儀測量原理及干涉測量技術的應用
白光干涉儀測量原理及干涉測量技術的應用

激光干涉儀是如何測量位移的?

光纖傳感器是光電傳感器嗎
新型量子傳感技術可見光測量紅外區域的擾動
ATA-2021B高壓放大器在光纖超聲傳感器中的應用
激光共聚焦和白光干涉儀哪個好?
激光共聚焦和白光干涉儀哪個好?






 工商網監
工商網監
評論