") 使用DS1086作為微控制器時(shí)鐘以降低EMI
使用DS1086作為微控制器時(shí)鐘以降低EMI
DS1086擴(kuò)頻經(jīng)濟(jì)振蕩器?可用于減少輻射發(fā)射 (EMI),而不必通過(guò)添加額外的組件(如 EMI 屏蔽、電纜屏蔽或 EMI 濾波器)來(lái)增加系統(tǒng)成本。通過(guò)對(duì)輸出頻率進(jìn)行抖動(dòng),基頻分布在一定頻率范圍內(nèi),從而降低發(fā)射峰值的幅度。本應(yīng)用筆記將展示DS1086如何與兩個(gè)常見(jiàn)的微控制器(8051和PIC)連接。將討論設(shè)計(jì)注意事項(xiàng),因?yàn)殡S著抖動(dòng)引入系統(tǒng),系統(tǒng)設(shè)計(jì)人員應(yīng)了解抖動(dòng)可能對(duì)整個(gè)系統(tǒng)產(chǎn)生的影響。除了降低EMI之外,本文還討論了使用DS1086代替晶體振蕩器的其他優(yōu)點(diǎn)。
擴(kuò)頻輸出
DS1086能夠降低輻射發(fā)射峰值。輸出頻率可以比編程頻率低2%或4%抖動(dòng)。雖然抖動(dòng)使能時(shí)輸出頻率會(huì)發(fā)生變化,但占空比不會(huì)改變。
圖1顯示了無(wú)抖動(dòng)的DS1086信號(hào)與使能1086%抖動(dòng)的DS4信號(hào)之間的比較。抖動(dòng)信號(hào)顯示振幅降低約16dB。以94MHz為例(僅用于說(shuō)明目的),4%抖動(dòng)信號(hào)的范圍為90.24MHz至94MHz,因?yàn)轭l率總是抖動(dòng)。2%抖動(dòng)信號(hào)的范圍為92.12MHz至94MHz。
圖1.時(shí)鐘頻譜比較。
三角波發(fā)生器將偏移元件注入主振蕩器以抖動(dòng)其輸出。抖動(dòng)速率(參見(jiàn)公式1)基于主振蕩器頻率,用戶(hù)可以在66MHz至133MHz范圍內(nèi)編程。

主振蕩器頻率為66MHz時(shí),三角波的抖動(dòng)率為16.1kHz。周期為62.06μs,如圖2所示。三角波的峰值在66MHz和66MHz之間變化 - 4%(63.36MHz)。由于抖動(dòng)速率很小,因此輸出頻率在周期之間看起來(lái)幾乎是固定的。
圖2.抖動(dòng)率。
在DS1086中,抖動(dòng)由預(yù)分頻器寄存器中的J0位控制,當(dāng)SPRD引腳連接高電平時(shí)使能。當(dāng)預(yù)分頻器設(shè)置為 1 時(shí),會(huì)發(fā)生最大頻譜衰減。預(yù)分頻器中使用的每2倍,頻譜衰減降低7.2dB。發(fā)生這種情況是因?yàn)轭A(yù)分頻器的分頻器功能傾向于在創(chuàng)建較低頻率時(shí)平均抖動(dòng)。然而,最嚴(yán)格的頻譜發(fā)射限制是在預(yù)分頻器設(shè)置為低分頻比的較高頻率上施加的。
使用DS1086作為微控制器時(shí)鐘
DS1086用作微控制器時(shí)鐘時(shí),可以工作在兩種不同的模式。模式是處理器控制模式和獨(dú)立模式。下面將更詳細(xì)地介紹這兩種模式以及設(shè)計(jì)考慮因素,在使用微控制器實(shí)現(xiàn)擴(kuò)頻振蕩器時(shí)應(yīng)解決這些問(wèn)題。
處理器控制模式
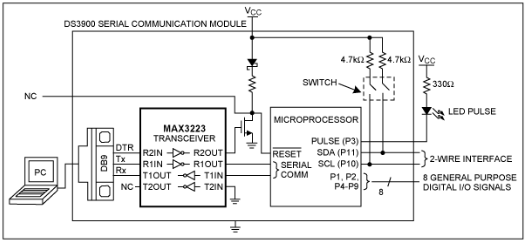
圖3所示為DS1086作為處理器控制模式下8051和PIC微控制器的系統(tǒng)時(shí)鐘。該圖還說(shuō)明了如何在一條公共總線(xiàn)上使用多個(gè)DS1086器件。每個(gè)微控制器彼此獨(dú)立,盡管相同的2線(xiàn)主控制器控制兩個(gè)微控制器。
圖3.DS1086作為8051和PIC微控制器的系統(tǒng)時(shí)鐘。
為了使2線(xiàn)主站與DS1086通信,每個(gè)DS1086都需要有自己唯一的器件地址。為了限制封裝的大小,沒(méi)有外部地址引腳。器件地址由ADDR寄存器中的三個(gè)地址位A2、A1和A0設(shè)置(見(jiàn)圖4)。設(shè)備地址出廠(chǎng)默認(rèn)值為 000b。DS1086可以設(shè)置為000b和111b之間的任何地址。如果多個(gè)DS1086器件位于同一條總線(xiàn)上,如圖3所示,它們的地址必須是唯一的。1086系統(tǒng)中的DS8051器件地址為000b,PIC系統(tǒng)中的DS1086器件地址為001b。
| REGISTER | ADDR | BINARY | DEFAULT | ACCESS |
| ADDR | 0Dh | X1 X1 X1 X1 WC A2 A1 A0 | 11110000b | R/W |
獨(dú)立模式
DS1086可替代晶體振蕩器。圖5所示為DS1086和8051微控制器處于獨(dú)立模式。PIC 也可以在獨(dú)立模式下使用。在獨(dú)立模式下,DS1086可以編程一次,然后通過(guò)電阻將SCL和SDA引腳連接高電平。
圖5.獨(dú)立模式。
如果DS1086永遠(yuǎn)不會(huì)在電路內(nèi)編程,即使在生產(chǎn)測(cè)試期間也是如此,則不需要上拉電阻,信號(hào)可以直接連接到電源。這簡(jiǎn)化了設(shè)計(jì),因?yàn)樗璧慕M件更少,并且不需要軟件。缺點(diǎn)是DS1086不重新設(shè)計(jì)硬件就無(wú)法輕松編程。
設(shè)計(jì)注意事項(xiàng)
當(dāng)使用擴(kuò)頻振蕩器作為基于微控制器的系統(tǒng)時(shí)鐘時(shí),需要解決以下問(wèn)題:
系統(tǒng)對(duì)頻率變化的接受程度如何?
哪些DS1086規(guī)格可能會(huì)影響微控制器?
微控制器時(shí)鐘的容差是多少?
會(huì)進(jìn)行實(shí)時(shí)測(cè)量嗎?
微控制器對(duì)數(shù)據(jù)設(shè)置和保持時(shí)間的規(guī)格有多嚴(yán)格?
微控制器時(shí)序計(jì)算應(yīng)該在什么頻率下進(jìn)行?
同步時(shí)鐘會(huì)用于時(shí)鐘恢復(fù)嗎?
與晶體振蕩器相比,DS1086具有優(yōu)勢(shì)
使用DS1086代替晶體振蕩器有很多優(yōu)點(diǎn)。由于DS1086具有擴(kuò)頻輸出,當(dāng)頻率抖動(dòng)比編程頻率低2%或4%時(shí),輻射發(fā)射峰會(huì)降低。DS1086的輻射發(fā)射(均方根電壓)比晶體振蕩器降低20dB。圖6所示為晶體振蕩器和DS1086(使能4%抖動(dòng))的時(shí)鐘頻譜幅度差異。
圖6.DS1086與晶體振蕩器的頻譜比較
用戶(hù)還可以輕松即時(shí)更改輸出頻率。可編程振蕩器無(wú)需購(gòu)買(mǎi)大量不同頻率的晶體振蕩器。此外,經(jīng)濟(jì)振蕩器不需要諧振電路,因?yàn)樗m用于需要高頻的系統(tǒng)中的晶體振蕩器。
DS1086也不易受到振動(dòng)的影響,具有關(guān)斷模式,封裝尺寸比某些晶體振蕩器更小。DS1086采用8引腳150mil SO封裝。8 引腳 118mil μSOP 是未來(lái)的產(chǎn)品。
結(jié)論
DS1086可代替晶體振蕩器用作微控制器的系統(tǒng)時(shí)鐘,以降低發(fā)射峰。本應(yīng)用筆記將DS1086作為兩種常用微控制器(8051和PIC)的時(shí)鐘。
審核編輯:郭婷
-
微控制器
+關(guān)注
關(guān)注
48文章
7570瀏覽量
151623 -
振蕩器
+關(guān)注
關(guān)注
28文章
3839瀏覽量
139169 -
emi
+關(guān)注
關(guān)注
53文章
3593瀏覽量
127817
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DS1086頻率計(jì)算器和頻率計(jì)算算法
低功耗模式下微控制器時(shí)鐘配置應(yīng)用
DS1388實(shí)時(shí)時(shí)鐘與8051微控制器的接口

DS1305 RTC與8051微控制器的接口
使用DS1086作為單片機(jī)的時(shí)鐘上以降低電磁干擾-Using
DS1086 EconOscillator 可編程時(shí)鐘發(fā)生器

DS1086,DS1086H,DS1086Z擴(kuò)頻EconOscillator

使用SmartWatch /幽靈時(shí)鐘與微控制器

將電源管理與高速微控制器結(jié)合使用

DS1307與兼容8051的微控制器接口
使用LabVIEW的2-Wire通信
超高速微控制器硬件增強(qiáng)串口功能
如何降低微控制器系統(tǒng)中的噪聲影響(3)
CDCE(L)949:支持SSC以降低EMI的靈活低功耗LVCMOS時(shí)鐘發(fā)生器數(shù)據(jù)表






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論