 對齊X型氣動焊鉗上的扁平電極臂及更換極臂.
對齊X型氣動焊鉗上的扁平電極臂及更換極臂.
對齊 X 型焊鉗上的扁平電極臂
在對齊固定式電極臂后必須注意要重新計算 TCP 點。
在對齊前要注意焊鉗隨附資料中的報告和圖紙。
第 1 步:切斷機器人焊鉗電流,釋放壓力并排出氣動元件的氣體。
第 2 步:關閉冷卻水循環。
第 3 步:將帶焊鉗的機器人移至一個安全的維護位置。或者分離機器人焊鉗與機器人,并將機器人焊鉗定位至適合進行維護工作的基架上。
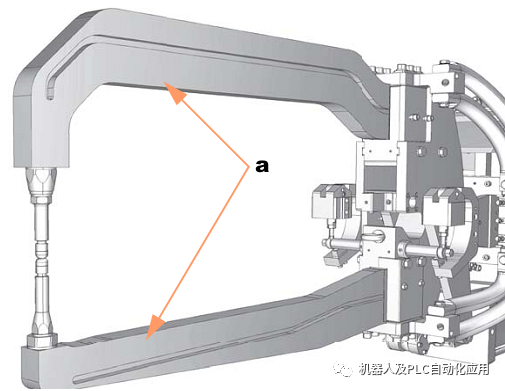
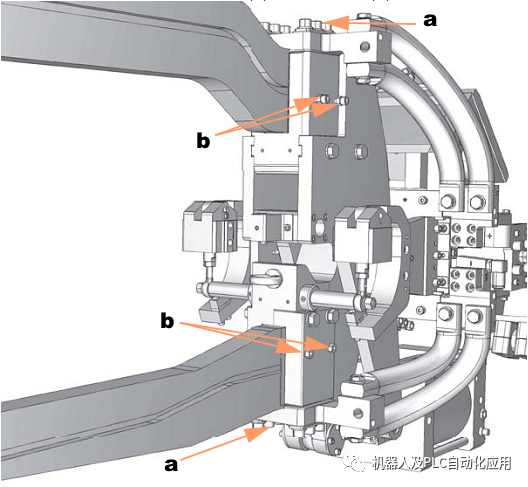
第 4 步:在帶扁平電極臂的 X 型焊鉗上可對齊兩根電極臂 (a)。
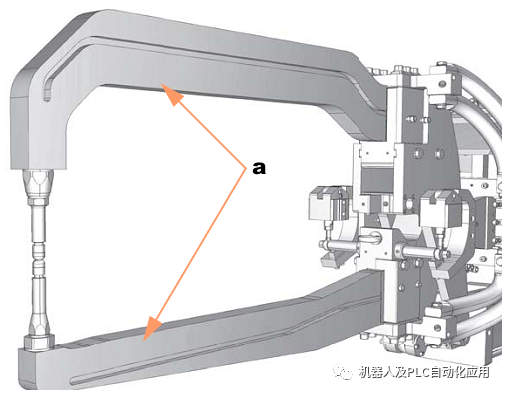
在對齊固定式電極臂時必須重新計算 TCP 點。移動式電極臂可在固定式電極臂上對齊。
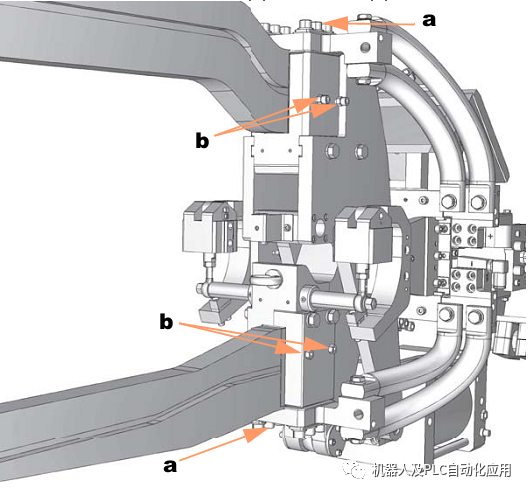
第 5 步:松開需對齊電極臂上的夾緊螺栓 (a或 b) 。
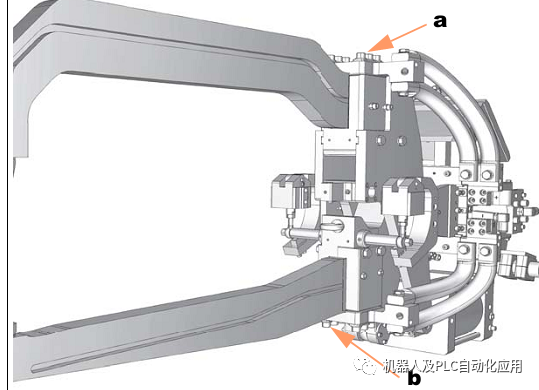
第 6 步:然后即可縱向移動松開的電極臂。進行側面對齊時請使用側面調節螺栓 (a 或 b)。
在使用調節螺栓時要注意在對齊后重新裝上電極臂上的所有調節螺栓。
第 7 步:在夾緊電極臂前要檢查所有絕緣件,確保沒有損壞。
必要時更換絕緣件!
第 8 步:計算 TCP 點。為此要注意焊鉗隨附資料中的報告和圖紙。
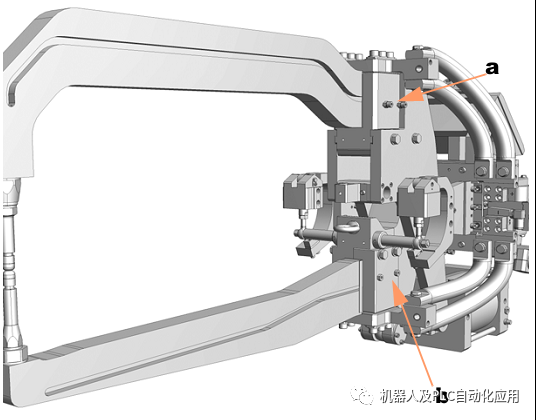
第 9 步:擰緊需對齊電極臂上的夾緊螺栓 (a或 b) 。
完成對齊。
更換 X 型焊鉗上的扁平電極臂
如果兩根電極臂都必須更換,我們建議您首先更換與舊電極臂對齊的電極臂,然后再更換第二根電極臂。
第 1 步:切斷機器人焊鉗電流,釋放壓力并排出氣動元件的氣體。
第 2 步:關閉冷卻水循環。
第 3 步:將帶焊鉗的機器人移至一個安全的維護位置。或者分離機器人焊鉗與機器人,并將機器人焊鉗定位至適合進行維護工作的基架上。
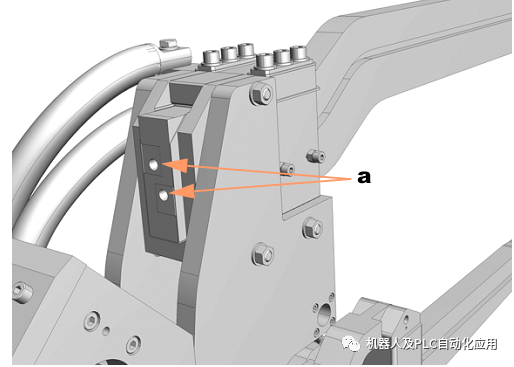
第 4 步:在帶扁平電極臂的 X 型焊鉗上可更換兩根電極臂 (a)。
第 5 步:取下電極臂上的冷卻水連接 (a)。
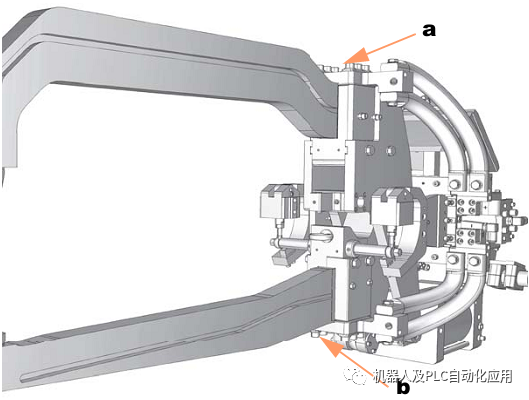
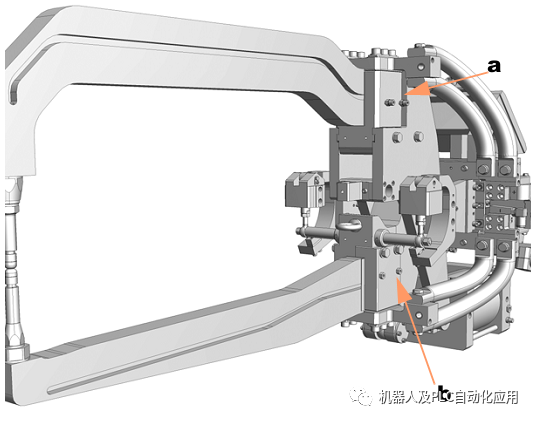
第 6 步:松開需更換電極臂的夾緊螺栓 (a) 和調節螺栓 (b)。
第 7 步:拉出電極臂并裝入新電極臂。
第 8 步:然后即可縱向移動更換后的電極臂。進行側面對齊時請使用側面調節螺栓 (a 或 b)。
在使用調節螺栓時要注意在對齊后重新裝上電極臂上的所有調節螺栓。
第 9 步:在夾緊電極臂前要檢查所有絕緣件是否損壞。
第 10 步:擰緊更換后電極臂的夾緊螺栓 (a) 和調節螺栓 (b)。
第 11 步:重新接上冷卻水軟管。
第 12 步:計算 TCP 點。為此要注意焊鉗隨附資料中的報告和圖紙。
電極臂更換完畢
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28419瀏覽量
207107 -
電極
+關注
關注
5文章
813瀏覽量
27225 -
焊鉗
+關注
關注
0文章
16瀏覽量
1391
原文標題:對齊 X 型氣動焊鉗上的扁平電極臂及更換極臂.
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
IR2136S 無刷電機驅動板,上橋臂全部輸出高電平,求解?
關于術中透視C型臂的介紹
術中透視C型臂是什么,有哪些作用
c形臂x光機的使用規范有哪些
中型C形臂X光機的應用及優勢

機器人對齊電極臂前的執行步驟






 工商網監
工商網監
評論