 KUAK機器人更換手軸A4-A5-A6A的幾個關鍵點V2.27
KUAK機器人更換手軸A4-A5-A6A的幾個關鍵點V2.27
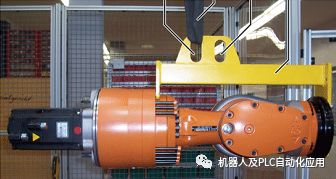
拆卸機器人手軸4-5-6
卸下機器人的工具.
記錄好卸下工具之前的個軸的位置
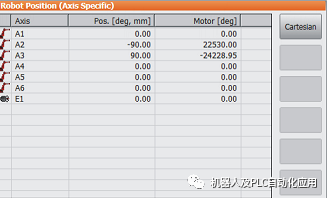
將機器人位置擺好.
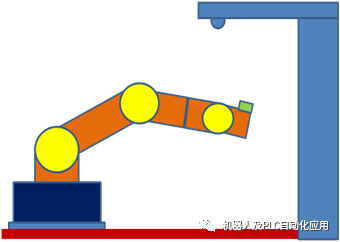
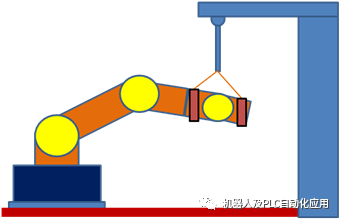
釣住機器人手軸,機器人關機
專用工具

操作步驟
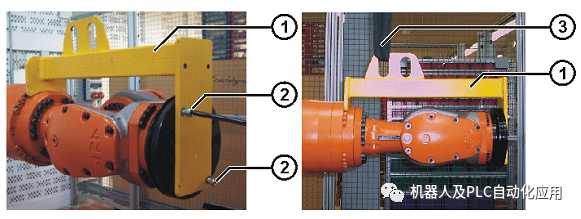
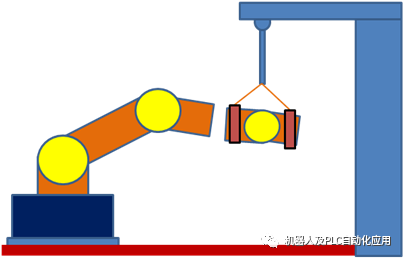
1. 用合適的設備固定主機械手:
? 起重機
? 掛裝設備 (滑輪)
? 主機械手起重裝置
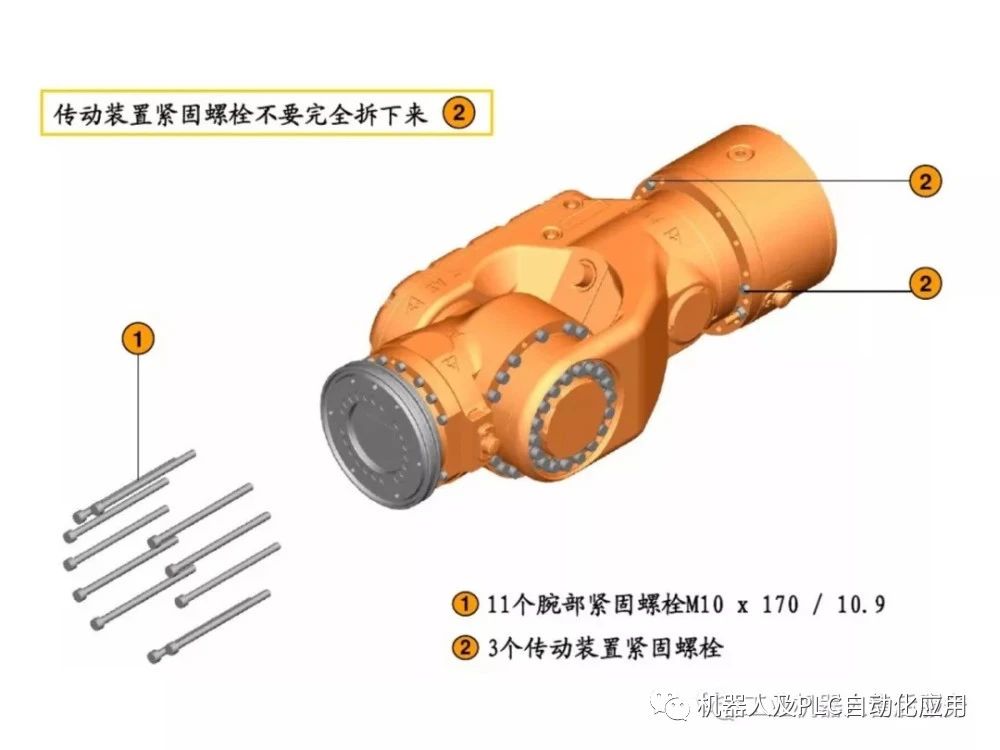
2. 松開用于固定手部的內六角頭螺栓 M10 x 170 / 10.9。
Quantec 主機械手:
位于孔圈最上方的那顆螺栓應在最后旋出。由此可避免松開時歪斜。
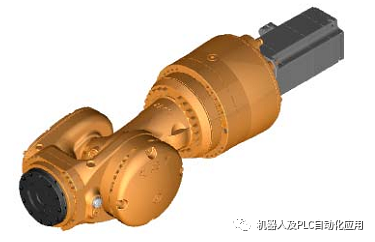
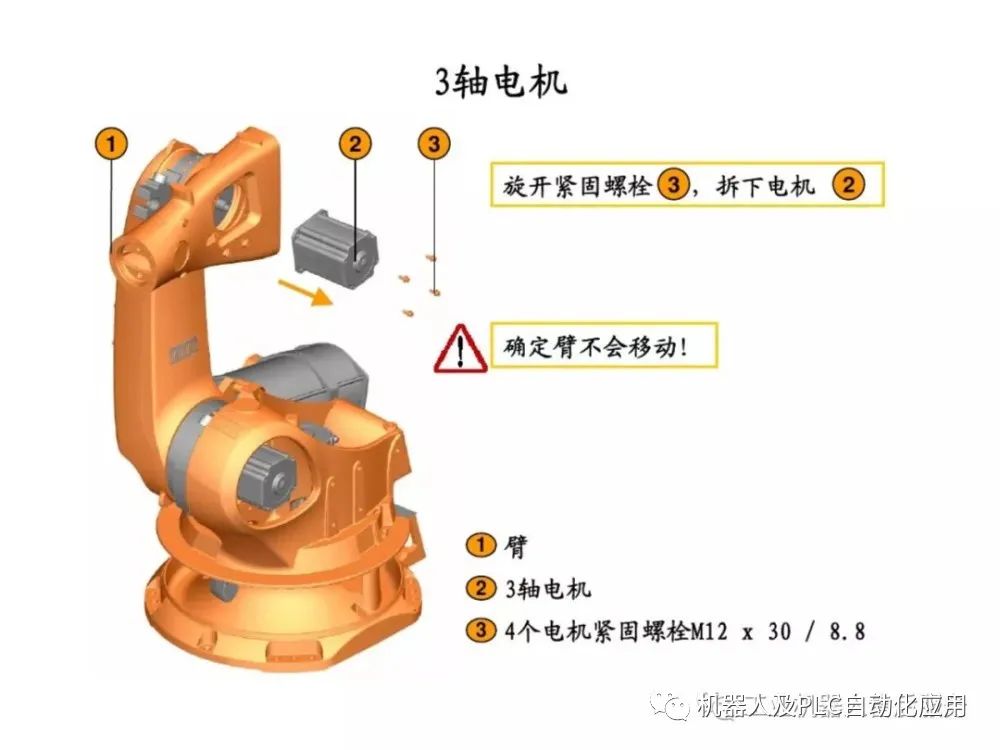
3. 旋出手部固定螺栓。
Quantec 主機械手固定螺栓
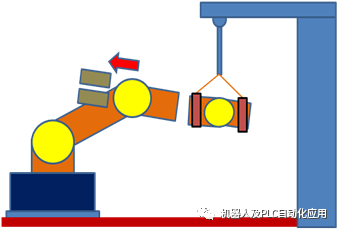
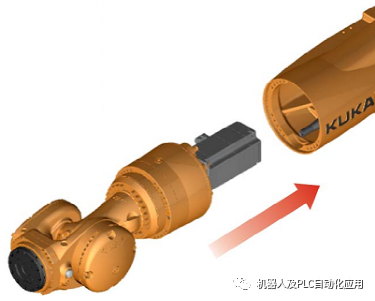
4. 將手部沿箭頭方向水平拉出約 20 cm
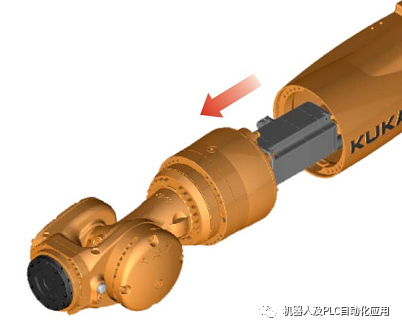
6. 將手完全從小臂中拔出。
7. 放在一塊合適的墊子上。
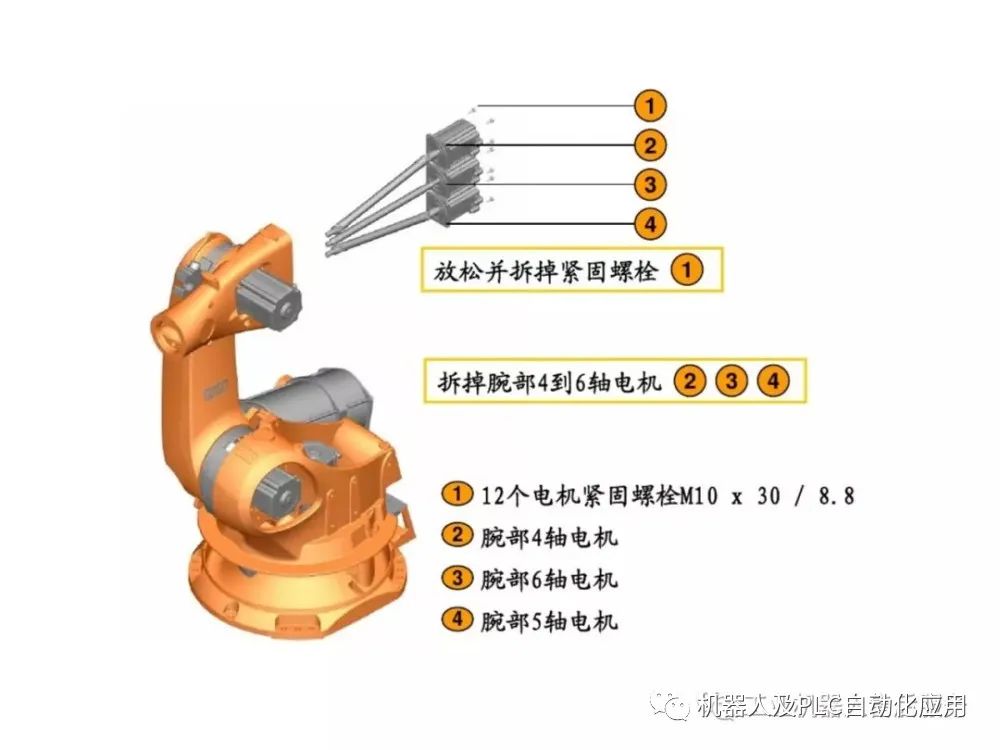
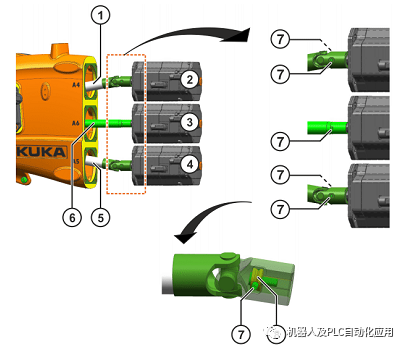
8. 松開軸 4 和軸 5 電機上的電機插頭和傳感器插頭。
9. 松開軸 4 和軸 5 手軸電機的螺栓。
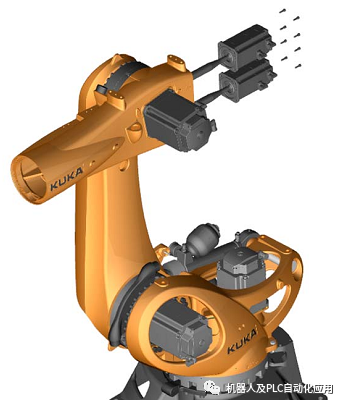

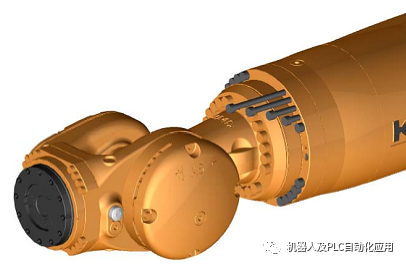
10. 松開無頭螺絲,拆下驅動軸 A5 和 A6。

驅動軸 A5 和 A6

安裝手部和手軸電機
操作步驟
1. 給軸連接件和配合面涂上少許 Microlube GL261。
2. 將軸 6 電機裝到主機械手上并用四個內六角螺栓 M8 x 25 / 8.8 以 23 Nm 的擰緊扭矩上緊。
3. 用合適的設備提起主機械手。
4. 在水平位置 — 吊在小臂前約 20 cm — 連接軸 6 的電機插頭和傳感器插頭。

連接軸 6 電機

5. 小心地沿箭頭方向將主機械手推入小臂,插入時要注意定位用的配合銷和軸 6 的布線。
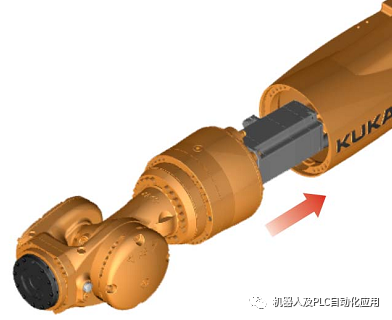
安裝主機械手
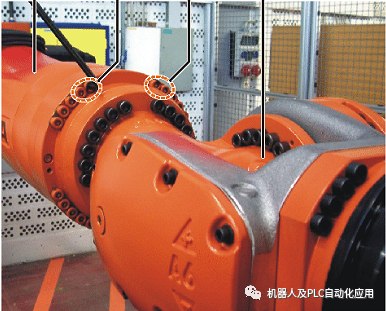
6. 旋入 20 個內六角螺栓 M10 x 170 / 10.9。
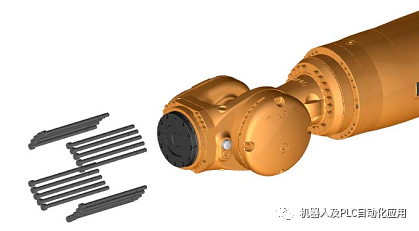
7. 用 60 Nm 的扭矩交叉擰緊。

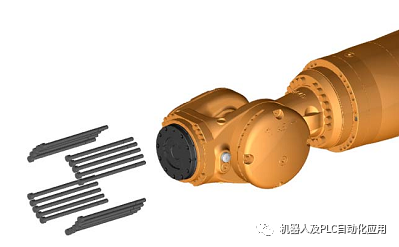
9. 將連接軸裝到軸 4 和軸 5 的電機上 (軸向固定),事先給軸連接件涂上少許 Microlube GL261,給緊定螺釘 M4 x 8 / 45H(擰緊扭矩 3.7 Nm)涂上少許三鍵粘膠 Drei Bond 1305。
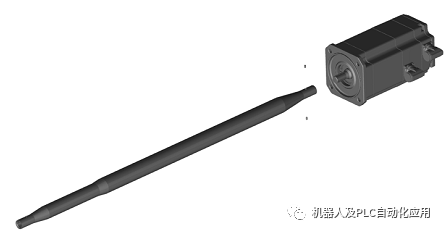
10. 將軸 4 和軸 5 的電機 (用連接軸)裝到小臂上并用 8 個內六角螺栓 M8 x 25 / 8.8 以 23 Nm 的擰緊扭矩上緊。

軸 4 和軸 5 的驅動軸
11. 連接軸 4 和軸 5 的電機插頭和傳感器插頭。

軸 4 和軸 5 電機的連接電纜
更換完手軸后要記得作零點標定哦

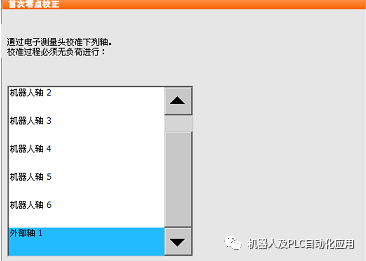
然后再按照記錄好的軸的位置去帶工具,這樣能確保6軸方向的工具安裝正確.







C2機器人的手軸電機位置
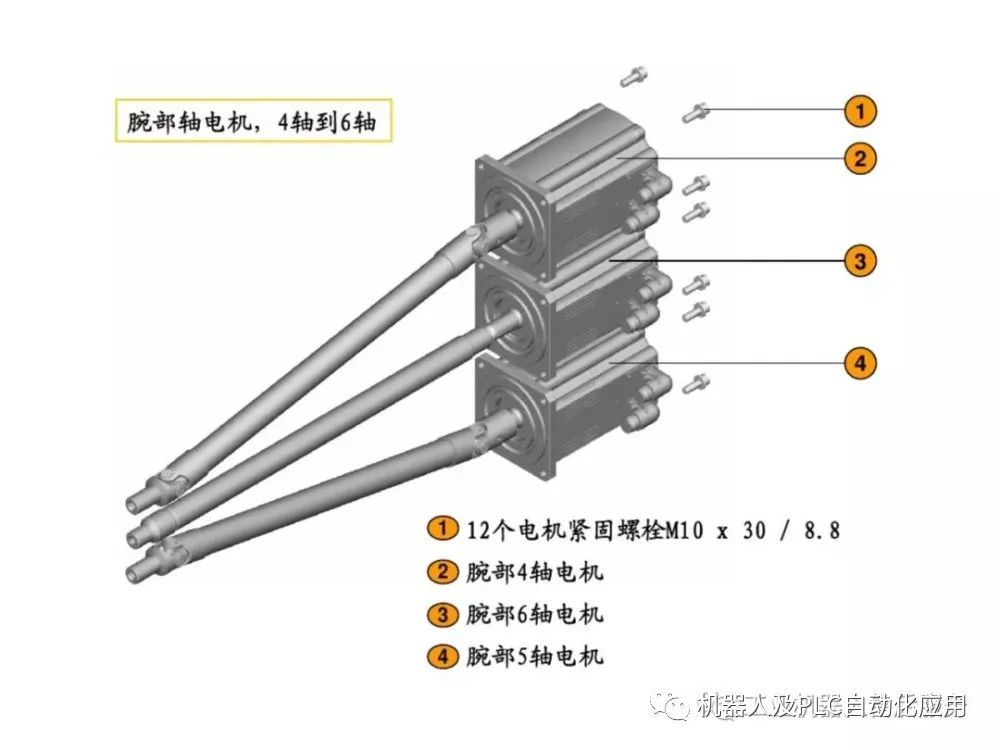
拆卸電機和驅動軸A4至A6
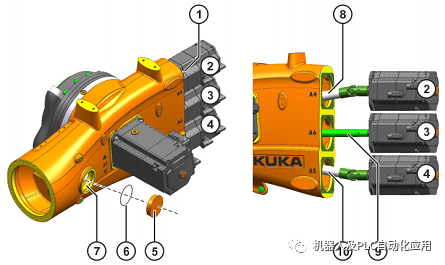
1.拆下蓋,包括安裝孔的O形圈
2.從電機上松開并拔下以下接頭:
? 在電機A4:XM4和XP4上
? 在電機A5:XM5和XP5上
? 電機A6上:XM6和XP6
3.拆下4個M10x30內六角螺釘,并將電機與驅動軸一起拉出。進行此操作時,用一只手伸入安裝孔,并將驅動軸推向電機。
拆卸電機和驅動軸
1個M10x30內六角螺釘
2電機A4
3電機A6
4電機A5
5安裝孔徑
6O形圈
7蓋
8萬向軸A4
9連接軸A6
10萬向軸A5
4.拆除電機和臂之間的密封件;僅適用于F變體。 5.將電機和驅動軸放在適當的支撐面上。 6.松開驅動軸上的以下M6x10緊定螺釘,直到驅動軸松開. ? 通用軸A4和A5上的2個固定螺釘 ? 連接軸A6上的1個固定螺釘
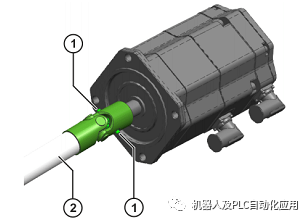
松開和拆卸萬向軸 1固定螺釘2萬向軸 7.將驅動軸從電機上拔下。 8.根據相關規定處理電機和/或驅動軸。 安裝電機和驅動軸A4至A6
1.清除新電機和/或新驅動軸上的所有保護涂層和油。
2.安裝前清潔電機的花鍵軸連接,并涂抹薄薄但連續的Microlube GL 261潤滑脂。
3.清潔臂殼體上的安裝表面。 4.將驅動軸推到電機軸上。 5.擰下以下M6x10固定螺釘并徹底清潔(無油脂): ? 通用軸A4和A5上的2個固定螺釘 ? 連接軸A6上的1個固定螺釘 6.在M6x10固定螺釘上涂抹Drei Bond 1342鎖緊劑,然后插入并擰緊。擰緊后,再次將固定螺釘松開45°。 固定螺釘必須與V形槽接合。 7.如圖所示放置以下插座 ? 電機A4:XM4和XP4 ? 電機A5:XM5和XP5 ? 電機A6:XM6和XP6 8.將帶電機的驅動軸插入臂殼體(對于F型:與密封件一起)。安裝時小心不要傾斜,并確保連接軸(齒)正確接合。
插入驅動軸和電機 1通用軸A4 5通用軸A5 2電機A4 6連接軸A6 3電機A6 7定位螺釘 4電機A5 8 V形槽 9.如圖所示對齊驅動軸
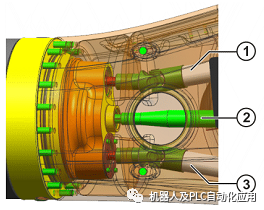
對齊驅動軸
1通用軸A4 2連接軸A6 3萬向軸A5 10.用扭矩扳手按對角順序插入并擰緊4個M10x30內六角螺釘。將擰緊力矩增加至MA=45.0 Nm。 11.將以下接頭插入插座: ? 在電機A4:XM4和XP4上 ? 在電機A5:XM5和XP5上 ? 電機A6上:XM6和XP6 12.清潔安裝孔并涂抹Drei Bond 1118 13.緊固蓋,包括安裝孔中的新O形圈。
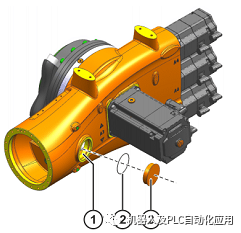
緊固安裝孔中的蓋和O形圈 1安裝孔 2 O形圈 3封面 14.主A4、A5和A6。
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28575瀏覽量
207748 -
機械手
+關注
關注
7文章
338瀏覽量
29701
原文標題:KUAK 機器人更換手軸A4-A5-A6A的幾個關鍵點V2.27
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
SPCE061A語音識別機器人應用方案
機器人DIY——最簡單的PVC-Robot A型
工業機器人的基本結構
KUKA機器人之Load data determination計算負載數據的應用分析

LTM4615演示電路-雙4A降壓+VLDO uModule(5V至1.8V@4A、3.3V至1.2V@4A和1.2V至1V@1.5A)







 工商網監
工商網監
評論