 基于磁控智能材料軟體機器人的設計與制造
基于磁控智能材料軟體機器人的設計與制造
導讀:軟體機器人具有自由度高、連續變形能力強和環境適應性好等諸多優點,是近年來機器人領域研究的前沿熱點。4D 打印最早由麻省理工大學提出,是指利用智能材料的響應特性結合編程化設計,制造出形態和性能隨時間可變的三維物體。4D打印與軟體機器人的結合,突破了機器人就是馬達齒輪加上控制的傳統概念,目前哈佛大學、MIT、德國馬普所、NASA等國際頂級科研單位均有所布局。3月3日19時30分,仿真秀機器人工業品仿真第八期講座《基于磁控智能材料軟體機器人的設計與制造》將邀請筆者分享軟體機器人前沿技術,詳情見后文。
一、智能材料與4D打印
智能材料(Intelligent material)指具有感知環境(包括內環境和外環境)刺激,對之進行分析、處理、判斷,并采取一定的措施進行適度響應的智能特征的材料。典型的智能材料如圖1所示。智能材料是繼天然材料、合成高分子材料、人工設計材料之后的第四代材料,是 21 世紀最具有發展潛力的前瞻性研究領域之一,也是當今世界軍事領域的關鍵技術。
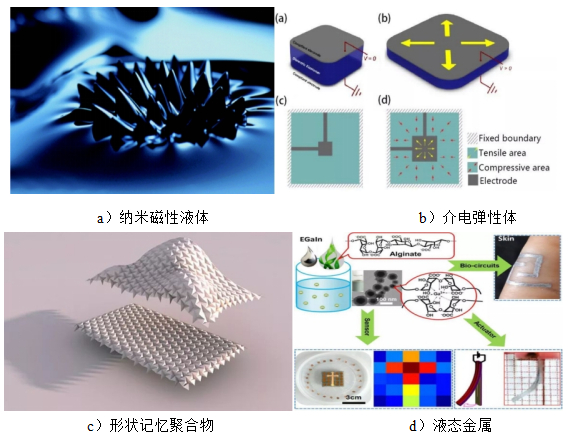
圖1 典型智能材料
4D打印技術是指由3D技術打印出來的結構能夠在外界激勵下發生形狀或者結構的改變,直接將材料與結構的變形設計內置到物料當中,簡化了從設計理念到實物的造物過程,讓物體能自動組裝構型,實現了產品設計、制造和裝配的一體化融合。將4D打印技術應用于軟體機器人的設計與制造中,可以突破現有軟體機器人驅動材料和支撐材料難以結合設計的技術瓶頸,使其結構功能化、功能多樣化。
2013年2月26日,在美國加利福尼亞州長灘市舉行的TED2013大會上,來自麻省理工學院的Skylar Tibbits將兩種具有不同孔隙率和吸水性的材料組合用于 3D 打印機,制造出了一種線狀物體。將該物體放入水中,物體改變了自身形狀,組成了麻省理工學院的字母縮寫 “MIT”,就此提出了 4D 打印的概念。
4D打印結構的形狀、屬性或功能在外部環境刺激(如水、光、熱、電流、磁場、酸堿環境等)下會隨著時間的推移而改變,如圖6所示。與3D打印結構相比,4D打印結構因為智能材料的使用而具有了自組裝、自適應、自我修復的特性。Wang等將遺傳易處理的微生物沉積物在濕度惰性材料上形成非均勻多層結構,制成生物雜化膜,該雜化膜可以在幾秒鐘內根據環境濕度梯度可逆地改變形狀。用其制成跑步服的皮瓣,皮瓣可以根據濕度梯度動態調節通風散熱。
4D打印最關鍵是將智能材料的響應特性與打印工藝有機結合,受自然界中卷須、葉子、花苞等通過內部膨脹來響應環境刺激的啟發;哈佛大學Sydney等基于采用纖維素與水凝膠的復合油墨打印了智能結構,在打印時,通過控制復合油墨中纖維素的排列,以對水凝膠網絡編碼溶脹行為。因此,當成型后的智能結構浸入水中后,部分結構受硬質纖維的約束而無法溶脹,整體結構發生局部溶脹,從而形成預設的零件模型。美國麻省理工大學Kim 等基于直寫式打印技術,采用磁性材料與硅膠的復合油墨打印了可實現快速變形的磁流變彈性體。在前驅液處于液態下混入磁粉(釹鐵硼),打印時在噴頭周圍施加定向磁場,以在材料固化前編碼磁疇方向。制備完成后的磁流變彈性體可以在外界磁場激勵下發生預設的變形,如圖2所示。
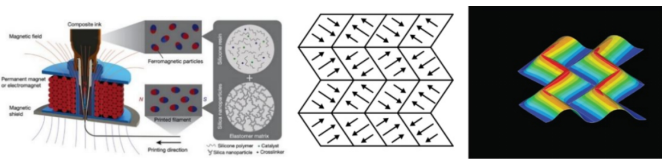
圖2 麻省理工大學采用4D打印方法制作的可變性磁流變彈性體
二、軟體機器人與制造技術
軟體機器人是一種新型柔軟機器人,能夠適應各種非結構化環境,與人類的交互也更安全,軟體機器人的驅動方式主要取決于所使用的智能材料;一般有介電彈性體(DE)、離子聚合物金屬復合材料(IPMC)、形狀記憶合金(SMA)、形狀記憶聚合物(SMP)、響應水凝膠等,從響應的物理量暫時分為如下幾類:電場、壓力、磁場、化學反應、光、溫度。科學家依此設計了各種各樣的軟體機器人,大多數軟體機器人的設計是模仿自然界各種生物,如蚯蚓、章魚、水母等。科學家曾預言,新型智能材料的研制及其在在軟體機器人的大規模應用將導致科學發展的重大革命。
軟體機器人制造技術包括形狀沉積制造、硅膠澆注、3D 打印和混合加工等工藝。形狀沉積制造是一種多層沉積工藝,通過重復沉積-去除的步驟,制得所需的軟體機器人本體結構。此外,還可在沉積過程中嵌入傳感器、驅動源和電路等功能部件,實現本體-傳感-驅動一體化制造。然而,形狀沉積制造一般只能采用手工操作且步驟繁瑣,限制了軟體機器人的制造質量和效率。硅膠澆注是通過拆分模型并設計模具,利用石蠟或凡士林涂層以防止粘連,將彈性體混合溶液(例如硅橡膠和固化劑)倒入模具固化成型,最后將各部分構件粘結成具有特定結構的軟體機器人本體。然而,硅膠澆注方式粘結面易破裂且難以適用于多材料制造等缺點限制了軟體機器人的服役生命周期、操作安全性及多功能性。
2016年,美國哈佛大學以超彈性硅膠材料作為本體材料,結合最新3D 打印技術,打印出了第一個純軟體仿章魚機器人,引起了國內外學者的廣泛關注,如圖3所示。3D打印制造技術避免了人工誤差、簡化了制造步驟,實現了軟體機器人低成本的個性化制造。隨著智能材料打印工藝與計算機仿真編程技術的不斷發展,基于智能材料響應特性的4D打印制造軟體機器人成為可能。然而由于材料4D打印工藝復雜,且打印后的材料響應特性無法重新進行編程,亟待基于材料流變特性將4D打印與軟體機器人技術相整合,提出結構功能一體化設計新方法。

圖3 哈佛大學采用3D打印技術制作的第一個純軟體機器人
三、基于磁控智能材料軟體機器人的設計與制造
為了幫助大家更好學習軟體機器人的前沿技術,并拓展創新思維,3月3日,仿真秀機器人工業品仿真第八期講座《基于磁控智能材料軟體機器人的設計與制造》將邀請仿真秀專欄作者、清華大學博士后李振坤老師分享,他長期從事磁性軟材料流變特性及測量的基礎理論、軟材料 3D 打印及 4D 打印、磁控軟體機器人開發研究。
審核編輯 :李倩
-
智能材料
+關注
關注
0文章
8瀏覽量
7457 -
4D打印
+關注
關注
0文章
37瀏覽量
11940 -
軟體機器人
+關注
關注
1文章
111瀏覽量
11728
原文標題:清華大學李振坤:基于磁控智能材料軟體機器人的設計與制造
文章出處:【微信號:sim_ol,微信公眾號:模擬在線】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
模仿蚯蚓開發軟體機器人
機器人常用材料
軟體機器人學習問題探討
功率放大器基于振動驅動的旋轉及攀爬軟體機器人的研究
功率放大器基于振動驅動的旋轉及攀爬軟體機器人的研究
軟體機器人 前所未見的機器人
軟體機器人能夠延展和操控自己形狀 擁有傳統機器人沒有的優勢
ASM將利用3D打印技術制造出真正的軟體機器人
研究人員已成功研發出一種新型的磁驅動高速軟體機器人
歐洲科學家研發出磁驅動的新型高速軟體機器人
創造一個不受外界幫助的軟體機器人





 工商網監
工商網監
評論