

SPI接口概述
AT32的SPI接口提供軟件編程配置選項,根據軟件編程配置方式不同,可以分別作為SPI和I2S使用。 本文將分SPI和I2S分別介紹SPI接口作SPI或I2S的功能特性以及配置流程。
AT32 SPI特點:
可編程配置的全雙工或半雙工通信
--全雙工同步通信
--半雙工同步通信(可以根據軟件編程配置選擇傳輸方向:發送或接收)
可編程配置主/從模式
可編程配置的CS模式:硬件/軟件CS模式
可編程配置的時鐘極性和相位
可編程配置的數據傳輸順序(MSB/LSB)
可編程配置的錯誤中斷標志(CS脈沖異常,接收溢出錯誤,主模式錯誤,CRC校驗錯誤)
數據接收/發送均支持DMA
兼容TI的SSP協議(即TI模式)
AT32 I2S特點:
可編程配置的操作模式
--從設備發送
--從設備接收
--主設備發送
--主設備接收
可編程配置的時鐘極性
可編程配置的時鐘頻率(8KHz到192KHz)
可編程配置的數據位數(16位,24位,32位)
可編程配置的聲道位數(16位,32位)
可編程配置的音頻協議
--I2S飛利浦標準
--高字節對齊標準(左對齊)
--低字節對齊標準(右對齊)
--PCM標準(長幀/短幀)
支持I2S全雙工
支持DMA傳輸
在通訊期間可提供頻率固定為256倍Fs(音頻采樣頻率)的外設主時鐘
SPI功能介紹
本章主要介紹SPI基本功能,以及AT32 SPI的各種附加可配置選項。
SPI硬件接口
SPI接口定義如下:
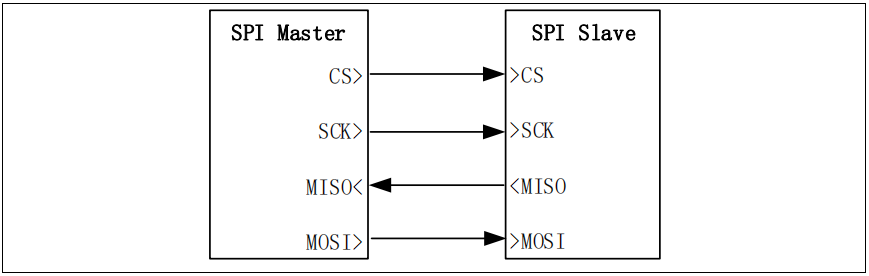
CS:片選引腳(可選)。 通常由主機輸出,從機輸入。 后續CS管理章節作詳細介紹。
SCK:時鐘引腳。 由主機輸出,從機輸入。
MISO:主收從發引腳。 主機則作為接收數據引腳,從機則做為發送數據引腳。
MOSI:主發從收引腳。 主機則作為發送數據引腳,從機則作為接收數據引腳。
以下介紹幾種常見的SPI通信接線方式。
1)如下圖1,是單主單從、全雙工、CS硬件模式的應用接線示意圖。
圖1 SPI單主單從、全雙工、硬件CS管理接線示意
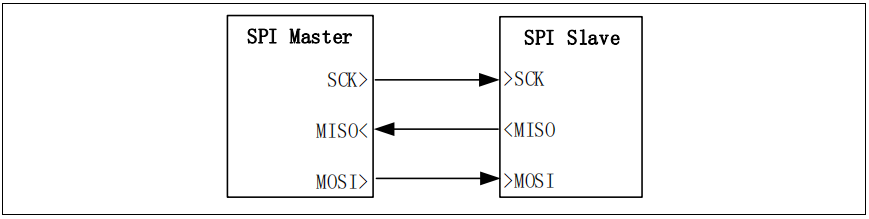
2)如下圖2,是單主單從、全雙工、CS軟件模式的應用接線示意圖。 在CS軟件管理模式下,無需使用CS引腳,主/從機的CS引腳都可以釋放給其他應用使用。 此時,從機對SWCSIL位清0或置1等效于“硬件CS模式”下的CS引腳輸入低電平和高電平。 主機則必須將SWCSIL位置1,以保證正確的處于主機模式。
圖2 SPI單主單從、全雙工、軟件CS管理接線示意
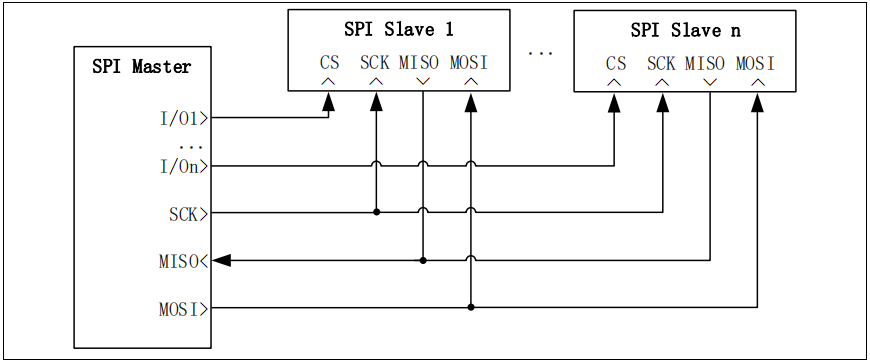
3)如下圖3,是單主多從全雙工接線示意。
主機使用普通I/O口1n輸出以驅動從機1n的片選CS,主機的SCK,MISO,MOSI和從機的SCK,MISO,MOSI引腳一對多連接。 此時SPI主機可以通過I/O1~n的選擇與多個從機進行分時通信。 此時從機必須使用硬件CS模式。 主機可以使用軟件CS模式,主機CS對應的引腳可以釋放給其他應用使用。
圖3 SPI單主多從、全雙工接線示意
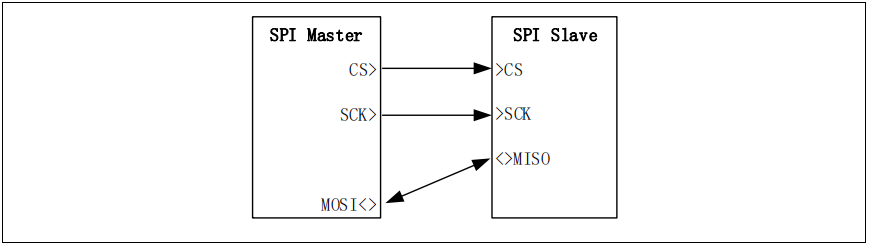
4)如下圖4,AT32的SPI增加了SPI半雙工模式,此模式下只需要使用3線即可通信。
主機使用MOSI進行數據收/發。 當主機配置為半雙工發送模式(SLBEN=1,SLBTD=1)時,主機MOSI為輸出引腳,用于發送數據; 當主機配置為半雙工接收模式(SLBEN=1,SLBTD=0)時,主機MOSI為輸入引腳,用于接收數據。
從機使用MISO進行數據收/發。 當從機配置為半雙工發送模式(SLBEN=1,SLBTD=1)時,從機MISO為輸出引腳,用于發送數據; 當從機配置為半雙工接收模式(SLBEN=1,SLBTD=0)時,從機MISO為輸入引腳,用于接收數據。
圖4 SPI單主單從、半雙工接線示意
SPI數據接收和發送
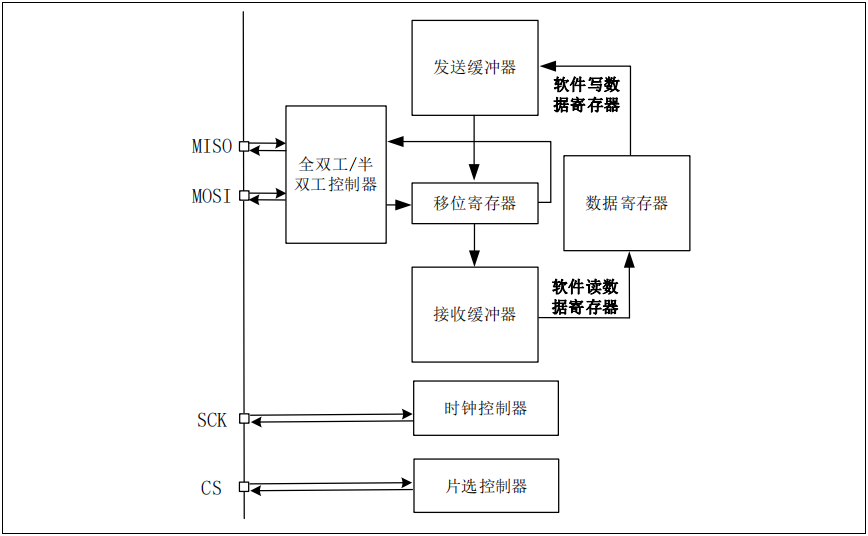
如下圖5,用戶軟件程序可以讀和寫數據寄存器,其他部分全由硬件自動完成。
以全雙工,硬件CS管理,8bit數據格式為例。 收發一筆數據的流程如下:
作為SPI主機時:
軟件使能SPI(SPIEN=1)后,硬件控制CS引腳輸出低電平,以片選從機。 之后軟件往數據寄存器寫入數據,如下圖5的“軟件寫數據寄存器”處,相當于往發送緩沖器寫入待發送數據,之后硬件會自動將發送緩沖器的待發送數據搬運到移位寄存器。 同時將發送緩沖器空標志置1(TDBE=1),以提醒軟件又可以往數據寄存器寫入下一筆待發送的數據。 之后硬件立即開始在SCK引腳上輸出時鐘信號,并在MOSI引腳上發出待發送數據的第一bit數據。 之后硬件從MISO引腳上讀取待接收數據的第一bit數據并放入移位寄存器中(移位寄存器由于之前發送了1bit數據,此時正好有一bit位置可以存放收到的數據)。 之后硬件會通過移位寄存器自動發送和接收剩下的7bit數據。 之后硬件會將移位寄存器中接收到的8bit數據搬運到接收緩沖器中,并將接收緩沖器滿標志置1(RDBF=1),以提醒軟件可以通過讀取數據寄存器來讀取剛剛接收到的這筆數據。
作為SPI從機時:
軟件使能SPI(SPIEN=1)后,軟件往數據寄存器寫入數據,相當于往發送緩沖器寫入待發送數據,然后硬件會將發送緩沖器空標志清0(TDBE=0),以提醒軟件此時發送緩沖器已有待發送數據了。 之后硬件檢測CS引腳和SCK引腳,等待來自主機的片選和時鐘信號。 檢測到片選和時鐘信號之后,硬件自動將發送緩沖器的待發送數據搬運到移位寄存器并在MISO引腳上發出待發送數據的第一bit。 同時將發送緩沖器空標志置1(TDBE=1),以提醒軟件又可以往數據寄存器寫入下一筆待發送的數據。 之后硬件從MOSI引腳上讀取待接收數據的第一bit數據并放入移位寄存器中(移位寄存器由于之前發送了1bit數據,此時正好有一bit位置可以存放收到的數據)。 之后硬件根據在SCK上的時鐘信號,會在MISO和MOSI引腳上發送和接收剩下的7bit數據。 之后硬件會將移位寄存器中接收到的8bit數據搬運到接收緩沖器中,并將接收緩沖器滿標志置1(RDBF=1),以提醒軟件可以通過讀取數據寄存器來讀取剛剛接收到的這筆數據。
也可以參考下一小節“SPI時序”來理解SPI收發邏輯。
圖5 SPI數據接收/發送框圖
SPI時序
本節介紹SPI通信時序。 包括全雙工和半雙工的主/從通信時序。
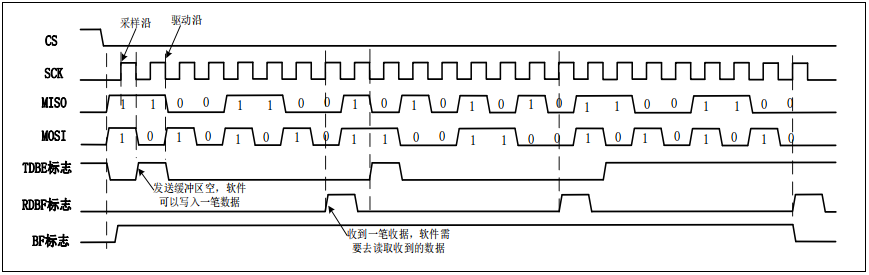
1、SPI全雙工時序
以全雙工、硬件CS管理、單主單從通信為例。
其中主機端相關配置如下:
MSTEN=1:設備為主機;
SLBEN=0:全雙工模式;
CLKPOL=0:SCK空閑輸出低電平;
CLKPHA=0:SCK第一個邊沿開始進行數據捕獲;
FBN=0:幀位個數為8bit;
SWCSEN=0,HWCSOE=1:使用硬件CS管理;
主機發送數據(MOSI):0xAA,0xCC,0xAA;
從機發送數據(MISO):0xCC,0xAA,0xCC。
主機端時序見下圖 6 :
圖6 硬件CS管理-全雙工-主機通信時序
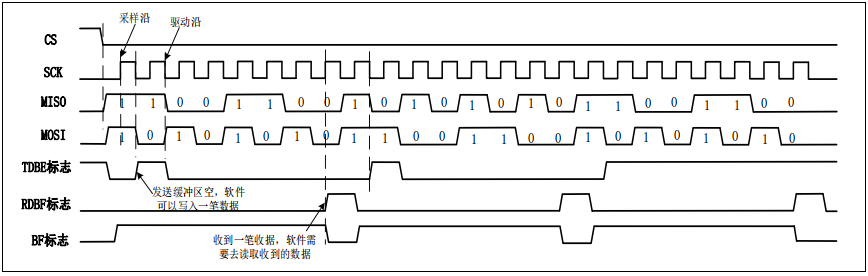
其中從機端相關配置如下:
MSTEN=0:設備為從機
SLBEN=0:全雙工模式;
CLKPOL=0:SCK空閑低電平
CLKPHA=0:SCK第一個邊沿進行數據捕獲
FBN=0:幀位個數為8bit
SWCSEN=0:使用硬件CS管理
主機發送數據(MOSI):0xAA,0xCC,0xAA
從機發送數據(MISO):0xCC,0xAA,0xCC
從機端時序見下圖 7 :
圖7 硬件CS管理-半雙工-從機通信時序
2、SPI半雙工時序
半雙工時序下,有主機發送、從機接收、主機接收、從機發送4種模式。
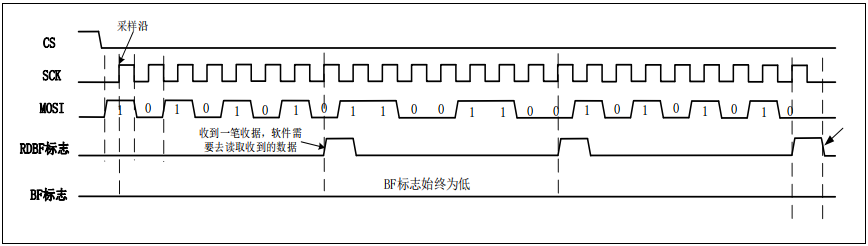
1)以半雙工、硬件CS管理、主機發送-從機接收通信為例。
其中主機端相關配置如下:
MSTEN=1 :設備為主機;
SLBEN=1 :使能單線雙向半雙工模式;
SLBTD=1 :發送模式;
CLKPOL=0:SCK空閑輸出低電平;
CLKPHA=0:SCK第一個邊沿開始進行數據捕獲;
FBN=0:幀位個數為8bit;
SWCSEN=0,HWCSOE=1:使用硬件CS管理;
主機發送數據:0xAA,0xCC,0xAA;
主機端時序見下圖 8 :
圖8 硬件CS管理-半雙工-主發時序
其中從機端相關配置如下:
MSTEN=0:設備為從機;
SLBEN=1 :使能單線雙向半雙工模式;
SLBTD=0 :接收模式;
CLKPOL=0:SCK空閑低電平;
CLKPHA=0:SCK第一個邊沿進行數據捕獲;
FBN=0:幀位個數為8bit;
SWCSEN=0:使用硬件CS管理;
從機接收數據:0xAA,0xCC,0xAA;
從機端時序見下圖 9 :
圖9 硬件CS管理-半雙工-從收時序
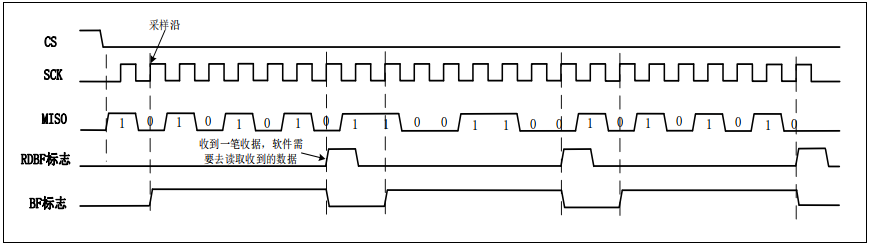
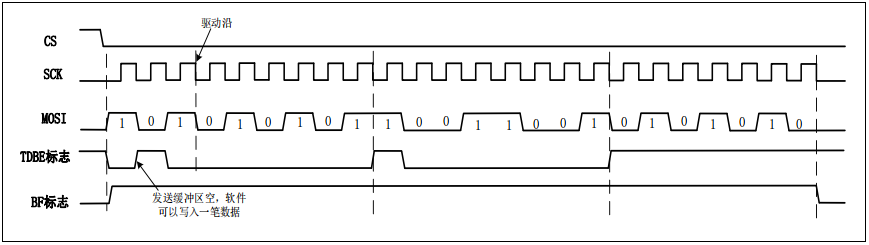
2)以半雙工、硬件CS管理、主機接收-從機發送通信為例。
其中主機端相關配置如下:
MSTEN=1 :設備為主機;
SLBEN=1 :使能單線雙向半雙工模式;
SLBTD=0 :接收模式;
CLKPOL=0:SCK空閑輸出低電平;
CLKPHA=0:SCK第一個邊沿開始進行數據捕獲;
FBN=0:幀位個數為8bit;
SWCSEN=0,HWCSOE=1:使用硬件CS管理;
主機接收數據:0xAA,0xCC,0xAA;
主機端時序見下圖10:
此模式下,較為特別的是,SPI主機一旦使能(SPIEN=1),就會連續不斷的輸出時鐘。 因此,主機在接收完需要接收的數據后,需要關閉SPI。 在本例中,接收完連續的3筆數據后,也就是下圖10的箭頭處,需要關閉SPI,輸出多余的時鐘。
另外,如下圖10,此模式下,BF標志始終為低。
圖10 硬件CS管理-半雙工-主收時序
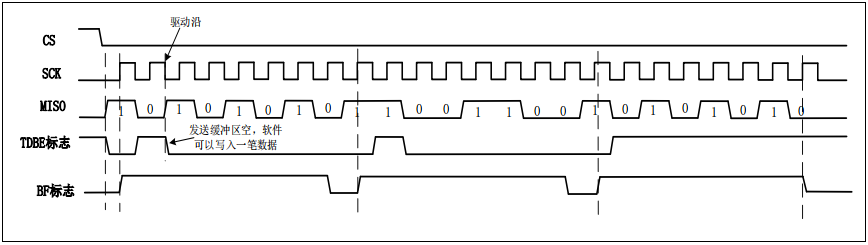
其中從機端相關配置如下:
MSTEN=0:設備為從機;
SLBEN=1 :使能單線雙向半雙工模式;
SLBTD=1 :發送模式;
CLKPOL=0:SCK空閑低電平;
CLKPHA=0:SCK第一個邊沿進行數據捕獲;
FBN=0:幀位個數為8bit;
SWCSEN=0:使用硬件CS管理;
從機發送數據:0xAA,0xCC,0xAA;
從機端時序見下圖 11 :
圖11 硬件CS管理-半雙工-從發時序
SPI數據收發方式
SPI的接收和發送如前文所述,是通過操作數據寄存器來完成的。 而根據操作數據寄存器的方法,SPI有以下3種數據接收發送方式。
輪詢方式
輪詢方式不需要使能SPI中斷和DMA。 只需要在main函數中不斷讀取STS寄存器,并判斷TDBE和RDBF標志是否置起,以確定何時向數據寄存器寫入待發送數據,何時從數據寄存器讀取接收到的數據。 比較耗費CPU資源,不建議使用此方式。 具體請參考“案例1--SPI全雙工輪詢方式通信”一節。
中斷方式
中斷方式需要開啟“發送數據緩沖器空中斷使能”和“接收數據緩沖器滿中斷使能”,即設置TDBEIE=1,RDBFIE=1。 并配置和使能SPI中斷。 之后在SPI中斷里進行數據的發送和接收,避免了輪詢方式的等待耗時,占用CPU資源相對較少。 具體請參考“案例4--SPI半雙工中斷方式通信”或“案例5--SPI半雙工中斷方式通信--加收發切換”一節。
DMA方式
DMA方式需要開啟SPI的DMA接收/發送功能(DMAREN=1,DMATEN=1)。 并配置DMA通道映射到SPI和使能DMA。 之后的接收和發送均由DMA完成,收/發過程不再需要軟件參與,不占用CPU資源。 具體請參考“案例2--SPI全雙工DMA方式通信”一節。
時鐘控制器
SPI協議采用同步傳輸。 作主機時,需要時鐘控制器產生通信時鐘用于SPI接口的數據收發,并且需要將該通信時鐘通過SCK引腳輸出給從機,用于從機的數據收發; 作從機時,需要外部提供通信時鐘,從SCK引腳輸入到SPI接口內部作為通信時鐘使用。 對用戶而言,可軟件配置的主要有極性、相位、分頻系數三個參數。
極性
SPI時鐘極性,即空閑時SCK引腳輸出的電平。 通過配置CLKPOL位來選擇SPI時鐘極性。
如下圖12:CLKPOL=0時,SCK空閑為低電平; CLKPOL=1時,SCK空閑為高電平。
圖12 時鐘極性對比

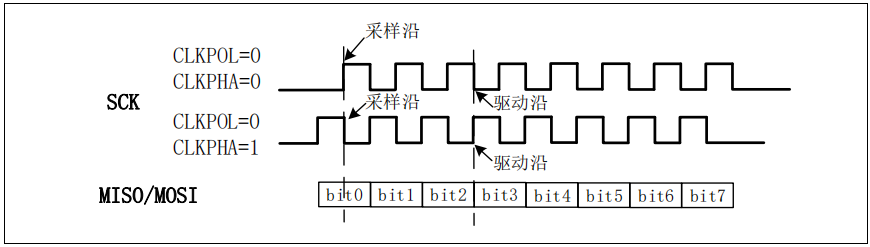
相位
SPI時鐘相位,即SPI數據捕獲邊緣。 通過配置CLKPHA位來選擇SPI時鐘極性。
如下圖13:
CLKPHA=0時,第一個邊沿為捕獲采樣邊沿。 在本例中(CLKPOL=0),也就是上升沿為采樣沿; 相對的,本例中下降沿為驅動沿。
CLKPHA=1時,第二個邊沿為捕獲采樣邊沿。 在本例中(CLKPOL=0),也就是下降沿為采樣沿; 相對的,本例中上升沿為驅動沿。
圖13 時鐘相位對比
分頻系數
SPI時鐘是從APB時鐘分頻得到的,通過配置MDIV[3:0]和MDIV3EN來選擇需要的分頻系數,以確定SPI時鐘。 分頻系數僅主機配置有效。 從機需要外部提供時鐘,因此此項配置無效。
CS管理
SPI CS包含硬件和軟件管理兩種模式,又根據主機/從機的不同,有不同的配置和應用場景。
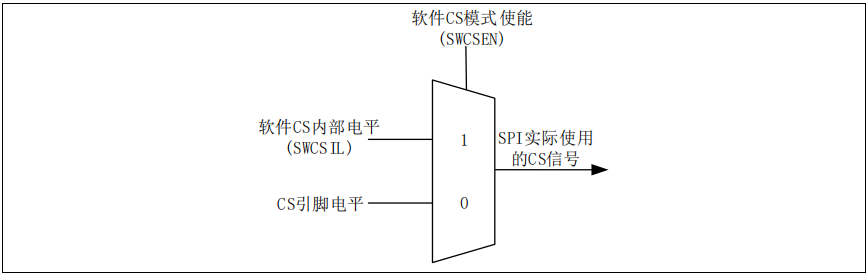
在CS為輸入模式時(HWCSOE=0),如下圖14,主機和從機均通過SWCSEN位來選擇SPI實際使用的CS信號來自軟件設置(SWCSIL)還是外部CS引腳電平。
在CS為輸出模式時(HWCSOE=1),軟件CS模式相關配置無效。
圖14 SPI數據接收/發送框圖
以下分別列出了主機和從機在不同的CS管理模式下的狀態和應用場景。
主機CS管理:
下表1列出了幾種主機CS管理的配置及應用場景。
表1 SPI主機CS管理配置
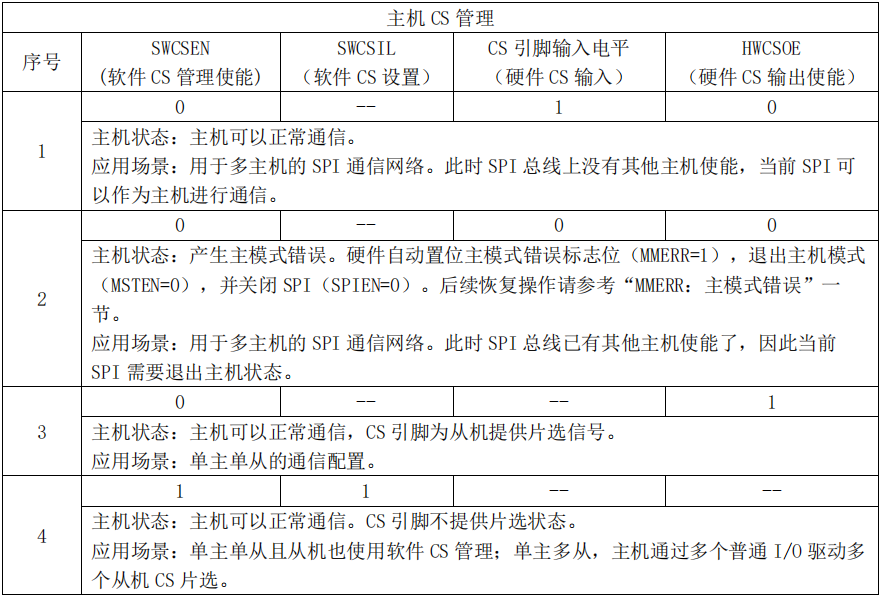
注:“--”表示此項配置無效,建議保持默認配置。
從機CS管理:
下表2列出了從機CS管理的幾種配置和應用場景。 其中,從模式下HWCSOE配置無效,該位只在主模式下有效。
表2 SPI從機CS管理配置
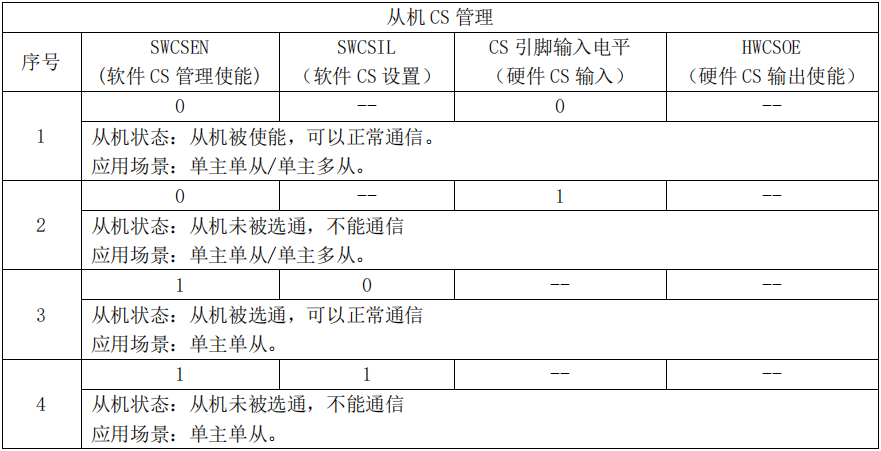
注:“--”表示此項配置無效,建議保持默認配置。
CRC校驗
AT32 SPI具有獨立的發送和接收CRC計算單元,用戶可通過軟件配置使能此功能。 使能CRC校驗之后:硬件會對發送的數據進行CRC計算,并將計算得到的CRC校驗碼放在SPI_TCRC寄存器中,CRC校驗碼緊接在數據之后發送; 且硬件會在接收一筆數據時對接收到的數據進行CRC計算,并將計算得到的CRC校驗碼放在SPI_RCRC寄存器中,硬件會在一筆連續的數據接收完成后將最后接收到的CRC校驗碼與SPI_RCRC寄存器中的校驗碼進行比較,如果不符,CRC校驗錯誤位(CCERR)會置起,若使能了錯誤中斷(ERRIE=1),將會產生中斷。
另外,SPI通信方式使用DMA和使用輪詢/中斷方式時,CRC功能的軟件操作步驟有區別,如下:
輪詢 /中斷方式:
①配置CRC多項式:配置SPI_CPOLY寄存器和需要通信的SPI一致(默認值為0x0007);
②使能CRC功能:CCEN=1;
③使能SPI:SPIEN=1;
④發送待發送的數據data_1~data_n;
⑤請求發送CRC校驗碼:NTC=1。
注:NTC置1的時間參考下圖15的⑤段,需要在最后一筆數據(data_n)寫入數據寄存器到發送完成之間。 實際編寫軟件代碼時,建議在data_n寫入數據寄存器之后立即將NTC置1。
⑥硬件自動在data_n發送完成后立即發送CRC校驗碼(此時無需軟件參與)。
輪詢方式使用CRC功能可參考“案例6--SPI CRC功能使用”。
圖15 CRC使用流程(輪詢/中斷方式)

DMA方式:
SPI在使用DMA方式通信時,不需要軟件代碼去設置請求發送CRC校驗碼,即不需要去置位NTC位。 具體步驟如下:
①配置DMA:請參考“案例2--SPI全雙工DMA方式通信”的DMA配置部分;
②配置CRC多項式:配置SPI_CPOLY寄存器和需要通信的SPI一致(默認值為0x0007);
③使能CRC功能:CCEN=1;
④使能SPI:SPIEN=1;
⑤數據及CRC接收完成后需關閉SPI和DMA,之后再開啟,準備下一次通信。
TI模式(TI SSP協議)
AT32 SPI接口支持TI SSP協議,即TI模式。 用戶可以通過將TIEN位置1來使能TI模式。
使能TI模式后,SPI接口將按照TI協議要求產生時鐘SCK,和片選信號CS。 也就是CS軟/硬件管理相關控制位、時鐘極性/相位相關控制位配置無效,請保持默認設置。 使能TI模式后,幀格式(8/16bit)配置、CRC校驗、DMA等功能仍然可以使用。
TI模式下,連續和不連續通信稍有區別。 連續通信時,只有第一筆數據發送時有一個dummy CLK; 不連續通信時,每筆數據都有一個dummy CLK。 參考下圖16和圖17。
TI模式連續通信時序圖見下圖16。 主機發送數據(MOSI):0xAA,0xCC,0xAA; 從機發送數據(MISO):0xCC,0xAA,0xCC。
圖16 TI模式連續通信時序圖
TI模式不連續通信時序圖見下圖17。 主機發送數據(MOSI):0xAA,0xCC,0xAA; 從機發送數據(MISO):0xCC,0xAA,0xCC。
圖17 TI模式不連續通信時序圖

注:AT32只有部分型號支持TI模式。 AT32F425/F435/F437等型號支持TI模式,AT32F403/F403A/F407/F413/F415等型號不支持TI模式。 具體請參考各型號的RM。
SPI錯誤
AT32的SPI有4種錯誤標志。 這4種錯誤標志共用一個錯誤中斷使能位(ERRIE)。 也就是當ERRIE=1時,產生以下4種錯誤的任一錯誤就會進入SPI錯誤中斷。
CSPAS--CS脈沖異常置位標志
在TI模式下,當SPI作從機使用時,SPI會在數據傳輸期間偵測非預期的CS脈沖,當發生CS脈沖異常置位錯誤,CSPAS被硬件置1,如果開啟了錯誤中斷使能(ERRIE=1),則會產生錯誤中斷。 之后可以通過軟件讀SPI_STS清除該位。 當偵測到CS脈沖異常時,為避免數據錯誤,軟件應當關閉SPI從機,重新配置SPI主機,再打開SPI從機以重新開始通信。
注:僅在TI模式下,CSPAS錯誤標志才有效。
ROERR-- 接收器溢出錯誤標志
當SPI數據寄存器已暫存一筆待讀數據時,又收到一筆新數據,則會發生接收器溢出錯誤,ROERR被硬件置1,如果開啟了錯誤中斷使能(ERRIE=1),則會產生錯誤中斷。 發生溢出錯誤之后,SPI_DT寄存器存放的是最早收到的那筆數據,發生溢出錯誤之后收到的數據都被丟棄。
之后依次讀取SPI_DT寄存器和SPI_STS寄存器可清除該標志位。
MMERR-- 主模式錯誤標志
參考“CS管理”一節,當SPI主機為CS輸入模式且CS引腳輸入低電平時,會產生主模式錯誤,MMERR位會被硬件置1,且硬件會強制SPI進入從機模式(MSTEN清0)并關閉SPI(SPIEN清0)。 如果開啟了錯誤中斷使能(ERRIE=1),則會產生錯誤中斷。
清除MMERR標志位并從錯誤狀態恢復請嚴格按照以下步驟執行:
①拉高CS引腳電平;
②執行一次對SPI_STS寄存器的讀或寫操作;
③執行一次對SPI_CTRL1寄存器的寫操作; (不需要改變SPI_CTRL1的值,只需要寫這個動作)
④之后硬件會自動清除MMERR標志(此步驟不需要軟件代碼參與);
⑤之后軟件可根據需要重新配置主/從模式和使能SPI。
CCERR--CRC****校驗錯誤標志
當使能了CRC功能后,如果接收到的CRC校驗碼(發送方發送的校驗碼)和SPI_RCRC的校驗碼(接收方根據接收到的數據計算的校驗碼)不符,則硬件將CCERR位置1,如果開啟了錯誤中斷使能(ERRIE=1),則會產生錯誤中斷。
由于發生了CRC校驗錯誤,軟件程序應當丟棄之前接收到的一筆數據,并重新通信。 軟件對CCERR位寫0可清除該標志位。
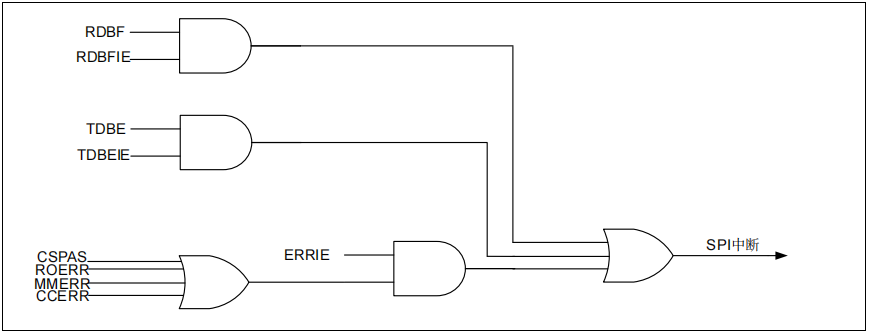
SPI中斷
如下圖18,SPI有一個全局中斷向量。 SPI中斷有三個中斷源:接收緩沖器滿、發送緩沖器空、通信錯誤(詳見上一節“SPI錯誤”)。 這三個中斷源分別有對應的使能位。
下圖中,3個中斷使能位定義如下:
RDBFIE:接收數據緩沖器滿中斷使能
TDBEIE:發送數據緩沖器空中斷使能
ERRIE:錯誤中斷使能
下圖中,5個標志位定義如下:
ROERR:接收器溢出錯誤
MMERR:主模式錯誤
CCERR:CRC校驗錯誤
RDBF:接收數據緩沖器滿
TDBE:發送數據緩沖器空
圖18 SPI中斷示意
I2S功能介紹
I2S硬件接口
I2S接口定義如下:
WS:聲道選擇。 由主機輸出,從機輸入。
CK:時鐘。 由主機輸出,從機輸入。
MCK:主時鐘輸出(可選)。 在通訊期間可提供頻率固定為256倍Fs的外設主時鐘,僅在作為主機時有效。
SD:數據。 主機/從機接收或發送數據均通過這個引腳。
以下是常見的I2S通信接線方式。
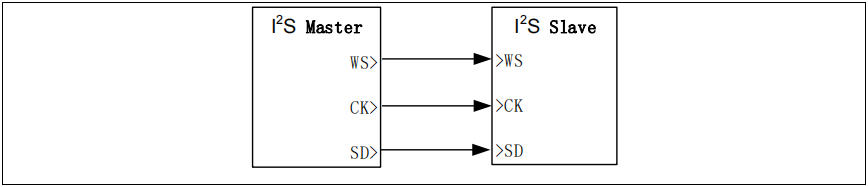
如下圖19,是I2S主發從收的接線示意圖。
圖19 I2S主發從收通信接線示意
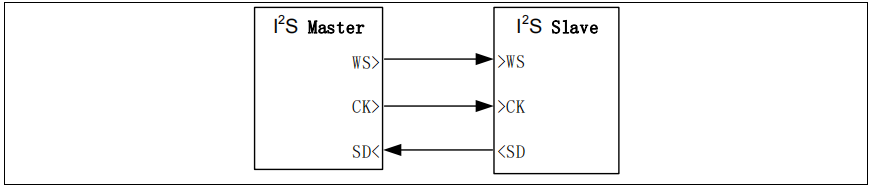
如下圖20,是I2S主收從發的接線示意圖。
圖20 I2S主收從發通信接線示意
I2S數據接收和發送
I2S數據收發模塊和上文的SPI共用數據寄存器和DMA映射,如上圖5中的接收/發送緩沖器、移位寄存器也都是共用的,因此軟件代碼操作類似,請參考下文的I2S案例一節。 不過SPI默認是全雙工,而I2S默認是半雙工。 AT32也為用戶提供I2S全雙工功能,后文I2S全雙工一節詳細介紹。
I2S音頻協議
AT32的I2S支持以下4種標準協議:
飛利浦標準:STDSLE=0b00;
高字節對齊標準(左對齊):STDSLE=0b01;
低字節對齊標準(右對齊):STDSLE=0b10;
PCM標準:STDSLE=0b11。
其中PCM標準又分為:
1、PCM長幀同步:PCMFSSEL=1;
2、PCM短幀同步:PCMFSSEL=0。
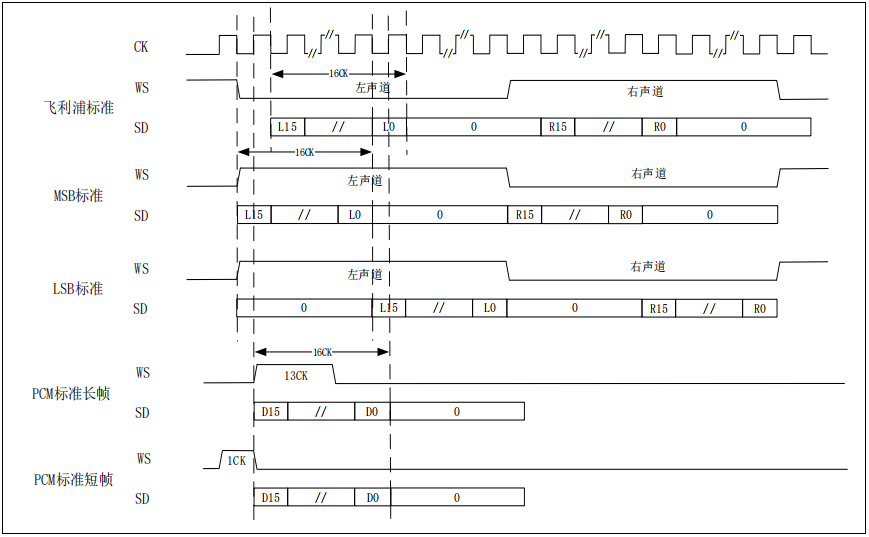
下圖21在“16位數據-32位聲道格式”,I2S時鐘極性為低(I2SCLKPOL=0)條件下對比了幾種音頻標準一幀數據的通信時序。
飛利浦模式下:WS為低電平表示正在傳輸的聲道為左聲道,WS為高電平表示正在傳輸的聲道為右聲道。 數據左對齊,即高位對齊,低位的16個bit被硬件填充為0。
MSB標準下:WS為高電平表示正在傳輸的聲道為左聲道,WS為低電平表示正在傳輸的聲道為右聲道。 數據左對齊,即高位對齊,低位的16個bit被硬件填充為0。
LSB標準下:WS為高電平表示正在傳輸的聲道為左聲道,WS為低電平表示正在傳輸的聲道為右聲道。 數據右對齊,即低位對齊,高位的16個bit被硬件填充為0。
注:LSB標準下,數據發送順序還是高位在前。
PCM標準長幀下:沒有左右聲道之分,WS的脈沖代表同步信號而不是左右聲道。 WS脈沖長度為13個CK長度。
PCM標準短幀下:沒有左右聲道之分,WS的脈沖代表同步信號而不是左右聲道。 WS脈沖長度為1個CK長度。
圖21 I2S各音頻標準時序對比
I2S幀格式
AT32的I2S支持3種數據位個數選擇:
16位:I2SDBN=0b00
24位:I2SDBN=0b01
32位:I2SDBN=0b10
AT32的I2S支持2種聲道位個數選擇:
16位:I2SDBN=0
32位:I2SDBN=1
數據位個數和聲道位個數組合有以下4種幀格式:
①16位數據-16位聲道格式:I2SDBN=0b00,I2SDBN=0;
②16位數據-32位聲道格式:I2SDBN=0b00,I2SDBN=1;
③24位數據-32位聲道格式:I2SDBN=0b01,I2SDBN=1;
④32位數據-32位聲道格式:I2SDBN=0b10,I2SDBN=1;
上述的第②、③幀格式中,由于聲道位個數>數據位個數。 此時硬件會自動將多余的聲道位填充為0。 可參考上圖21中,“16位數據-32位聲道格式”的時序。
上述的①、②幀格式,在接收/發送數據時,僅需要讀取/寫入一次16bit的DT寄存器; 而③、④幀格式,在接收/發送數據時,需要讀取/寫入兩次16bit的DT寄存器。
I2S時鐘控制器
I2S 采樣率( Fs )
常見的音頻的采樣頻率有:192KHz、96kHz、48kHz、44.1kHz、32kHz、22.05kHz、16kHz、11.025kHz、8kHz等。 而實際上AT32的I2S可以產生以上范圍內的任何采樣率。
例如采樣率為192K,則表示每秒可傳輸192K幀音頻數據。 對于飛利浦/MSB/LSB標準而言,一幀音頻數據包含左、右通道兩筆16/32bit的數據; 對于PCM標準而言,一幀數據僅包含一筆16/32bit的數據。
I2S 時鐘( CK )和主時鐘( MCK )
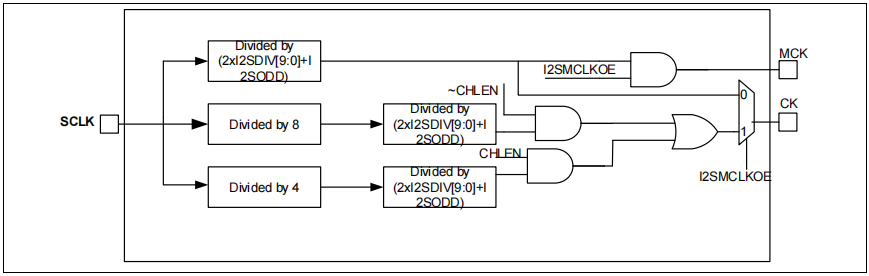
如下圖22,I2S的時鐘從系統時鐘SCLK分頻得來。 不過使用I2S時仍然需要使能掛載在APB時鐘總線上的SPI接口時鐘(SPIxEN=1),以用于I2S邏輯控制器等。
當需要輸出主時鐘(I2SMCLKOE=1),聲道位個數為16bit(I2SDBN=0)時:
Fs=SCLK/[(162)((2*I2SDIV)+I2SODD)*8];
當需要輸出主時鐘(I2SMCLKOE=1),聲道位個數為32bit(I2SDBN=1)時:
Fs=SCLK/[(322)((2*I2SDIV)+I2SODD)*4];
當不需要輸出主時鐘(I2SMCLKOE=0),聲道位個數為16bit(I2SDBN=0)時:
Fs=SCLK/[(162)((2*I2SDIV)+I2SODD)];
當不需要輸出主時鐘(I2SMCLKOE=0),聲道位個數為32bit(I2SDBN=1)時:
Fs=SCLK/[(322)((2*I2SDIV)+I2SODD)];
圖22 I2S時鐘
如下表3,示例了系統時鐘為240MHz時,配置192K的采樣率推薦的I2S時鐘配置方案。
表3 I2S時鐘配置方案示例

I2S全雙工
AT32F403A/F407/F435/F437/F425等型號支持I2S全雙工,AT32F403/F413/F415/F421等型號不支持I2S全雙工,具體請參考對應型號RM文檔。 不同型號MCU的I2S全雙工實現方式也有所區別,本文會分別介紹AT32F403A/F407/F435/F437和AT32F425的I2S全雙工功能。
AT32F403A/F407/F435/F437的I2S****全雙工
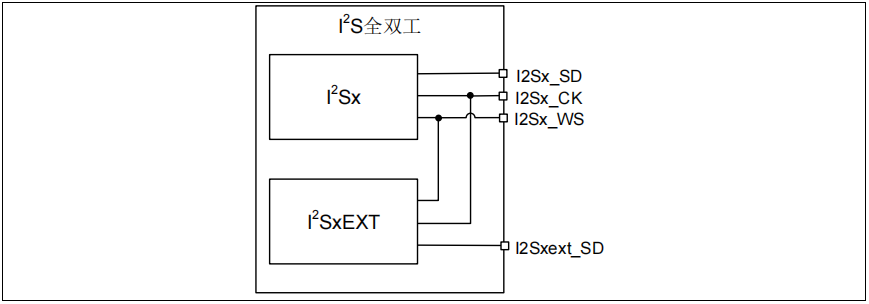
AT32F403A/F407/F435/F437為了支持I2S全雙工模式,額外例化了兩個I2S模塊(I2S2EXT,I2S3EXT)。 I2S2可與I2S2EXT組合在一起支持全雙工模式,I2S3可與I2S3EXT組合在一起支持全雙工模式。 代碼可參考“案例3—AT32F403A/F407/F435/F437 I2S全雙工DMA方式通信”。
在I2Sx可與I2SxEXT組成全雙工模塊時,I2Sx可配置為主或從模式,I2SxEXT只能配置為從模式。 I2SxEXT共享I2Sx的CK和WS,對應的有以下幾種配置方式:
I2Sx主發(OPERSEL=0b10); I2SxEXT從收(OPERSEL=0b01);
I2Sx主收(OPERSEL=0b11); I2SxEXT從發(OPERSEL=0b00)。
I2Sx從發(OPERSEL=0b00); I2SxEXT從收(OPERSEL=0b01);
I2Sx從收(OPERSEL=0b01); I2SxEXT從發(OPERSEL=0b00)。
注:I2S2EXT和I2S3EXT只用于I2S全雙工模式,而不能單獨使用。
圖23 I2S全雙工結構圖
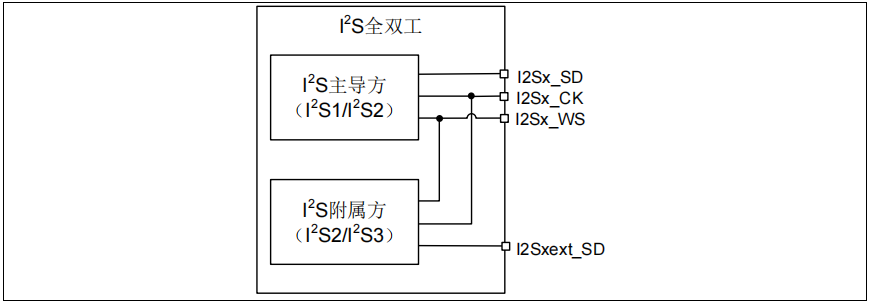
AT32F425的I2S全雙工
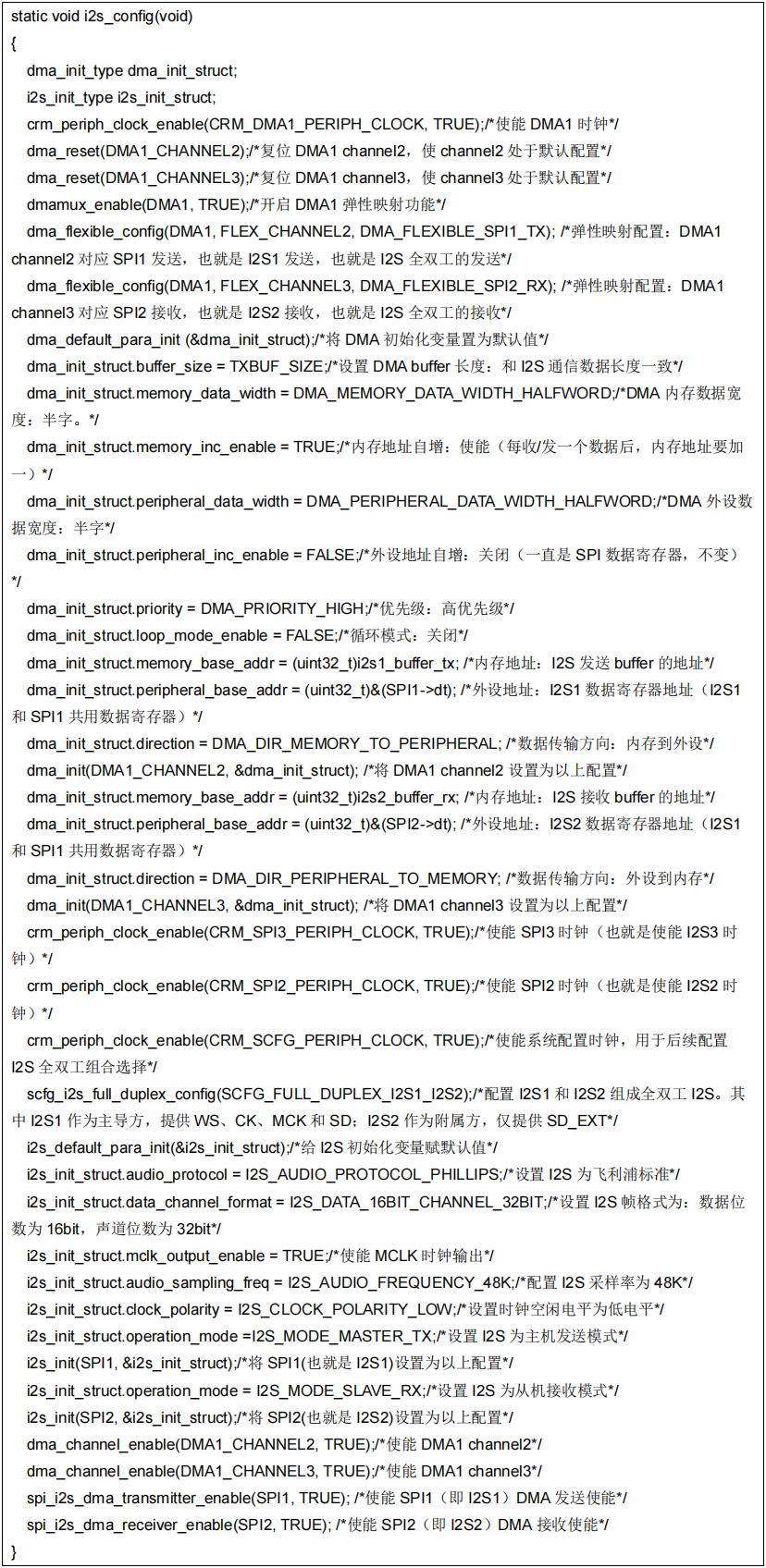
AT32F425的I2S全雙工實現方式和AT32F403A/F407/F435/F437不同。 AT32F425可以通過設置SCFG_CFG2寄存器中的I2S_FD將兩個SPI組合在一起實現I2S全雙工。 代碼可參考“案例4—AT32F425 I2S全雙工DMA方式通信”。 CK和WS由I2S主導方提供,附屬方的CK和WS對應引腳可以釋放給其他功能使用。 根據I2S_FD配置,有以下幾種組合方式:
I2S_FD=0b00:I2S1~3各自獨立半雙工工作;
I2S_FD=0b01:I2S1和I2S3組成全雙工模式,其中I2S1為主導方,I2S3為附屬方。
I2S_FD=0b10:I2S2和I2S3組成全雙工模式,其中I2S2為主導方,I2S3為附屬方。
I2S_FD=0b11:I2S1和I2S2組成全雙工模式,其中I2S1為主導方,I2S2為附屬方。
圖24 I2S全雙工結構圖
I2S錯誤
ROERR-- 接收器溢出錯誤標志
此錯誤標志和SPI一樣,請參考前文“2.9.2 ROERR--接收器溢出錯誤標志”。
TUERR-- 發送器欠載錯誤標志位
在I2S從發模式下,如果在CK上檢測到了數據驅動沿,但新的發送數據并沒有被寫入數據寄存器,則會產生發送器欠載錯誤,此時硬件會將TUERR位置1。 軟件讀SPI_STS寄存器可清除該標志位。 此錯誤標志僅使用I2S時有效。
I2S中斷
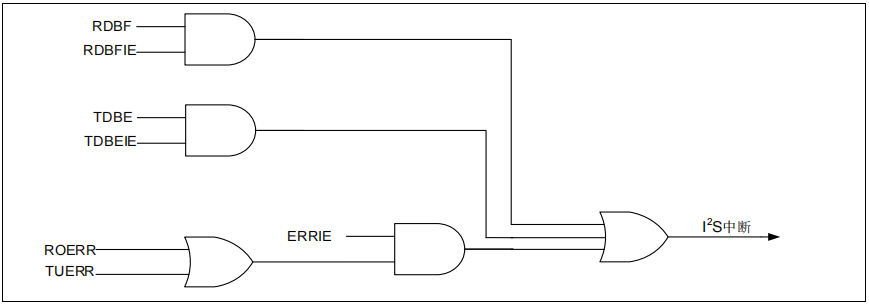
I2S和SPI共用一個全局中斷向量,即下圖25的“I2S中斷”和上圖18中的“SPI中斷”共用同一個中斷向量。 I2S中斷有三個中斷源:接收緩沖器滿、發送緩沖器空、通信錯誤(詳見上一節“I2S錯誤”)。 這三個中斷源分別有對應的使能位。
下圖中,3個中斷使能位定義如下:
RDBFIE:接收數據緩沖器滿中斷使能(和SPI一樣)
TDBEIE:發送數據緩沖器空中斷使能(和SPI一樣)
ERRIE: 錯誤中斷使能(和SPI一樣)
下圖中,4個標志位定義如下:
ROERR:接收器溢出錯誤(和SPI一樣)
TUERR:發送器欠載錯誤(僅I2S有這個錯誤標志)
RDBF:接收數據緩沖器滿(和SPI一樣)
TDBE:發送數據緩沖器空(和SPI一樣)
圖25 I2S中斷示意
SPI案例
注:所有project都是基于keil5而建立,若用戶需要在其他編譯環境上使用,請參考
AT32xxx_Firmware_Library_V2.x.xprojectat_start_xxx emplates中各種編譯環境(例如IAR6/7,keil4/5)進行簡單修改即可。
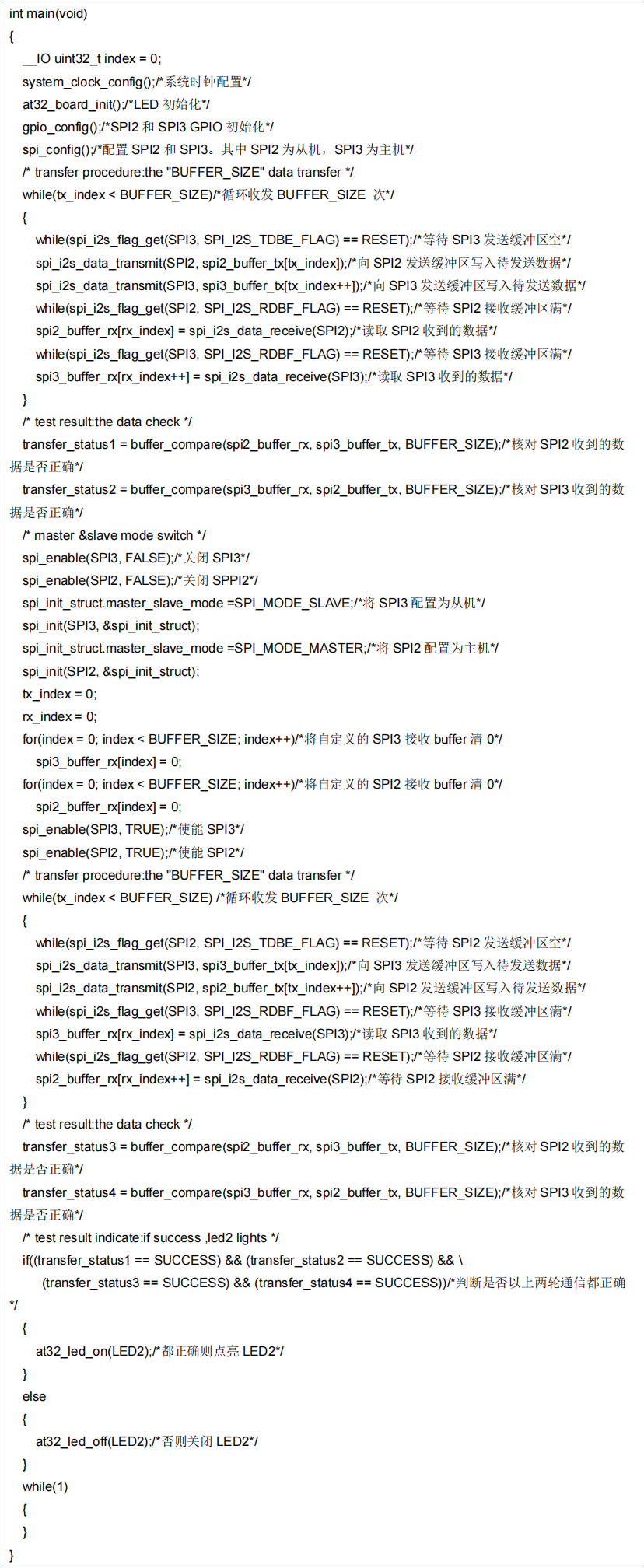
案例1-SPI全雙工輪詢方式通信
功能簡介
實現SPI2和SPI3之間的全雙工輪詢通信。 接線如下:
SPI2 SPI3
PD1(短短板)<--->PC10(短單)
PC2(味噌)<--->PC11(味噌)
PD4(莫西)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesspifullduplex_polling
軟件設計
1)配置流程
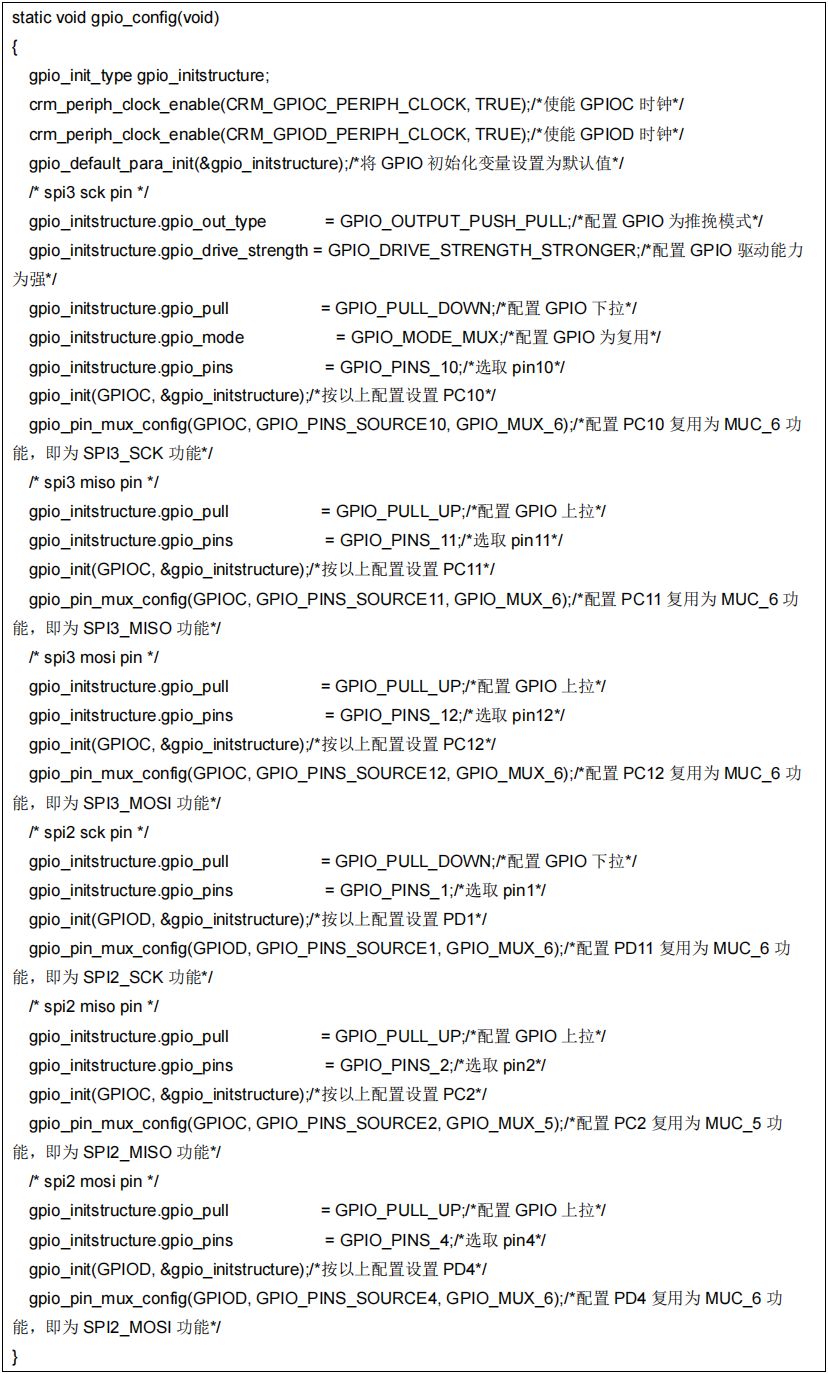
配置SPI2和SPI3對應的GPIO;
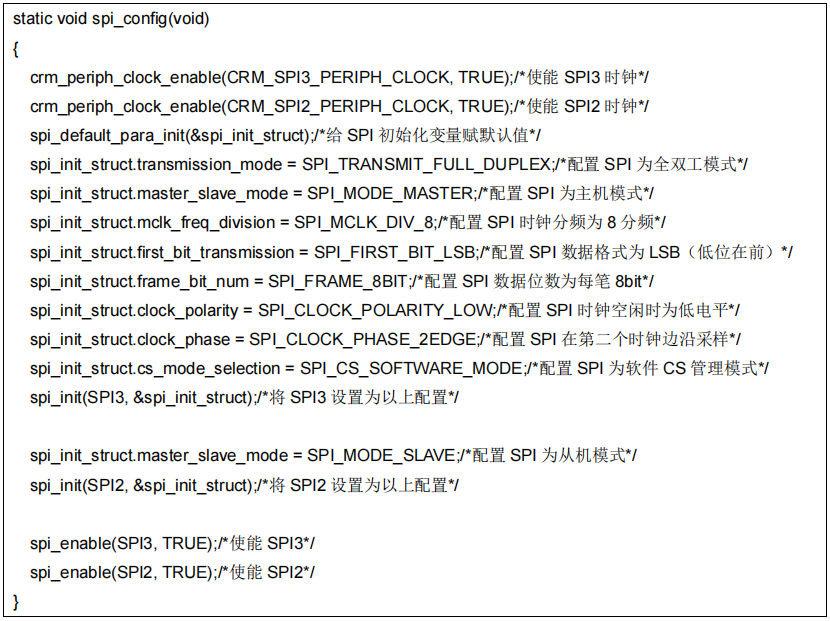
配置SPI2和SPI3通信配置;
開始輪詢通信。
2)代碼介紹
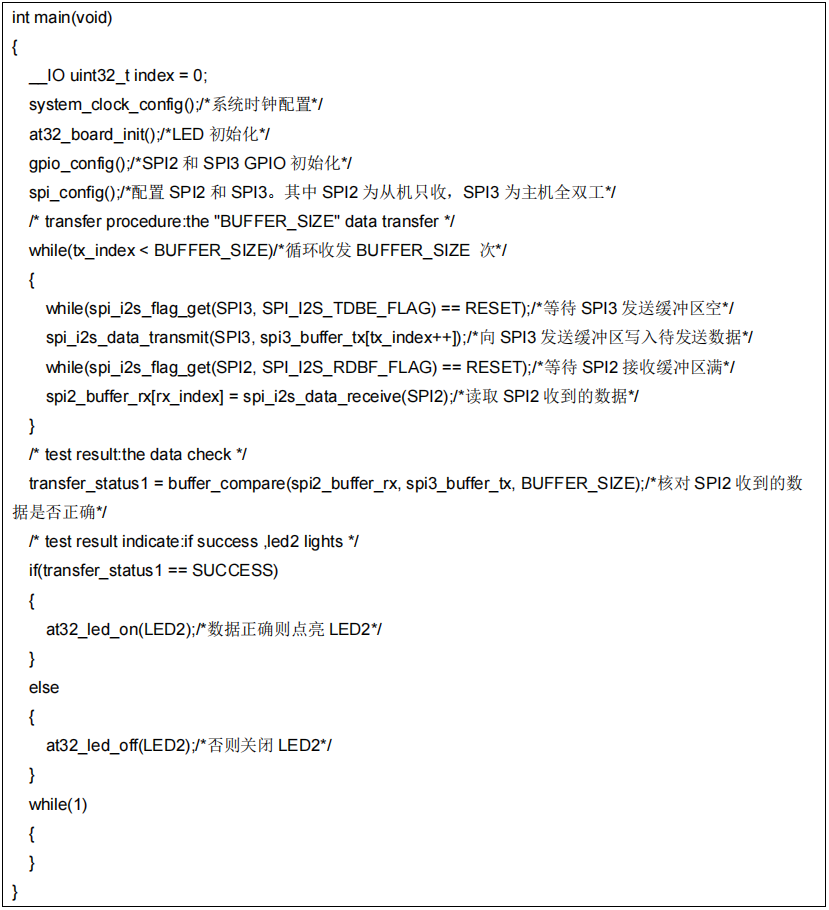
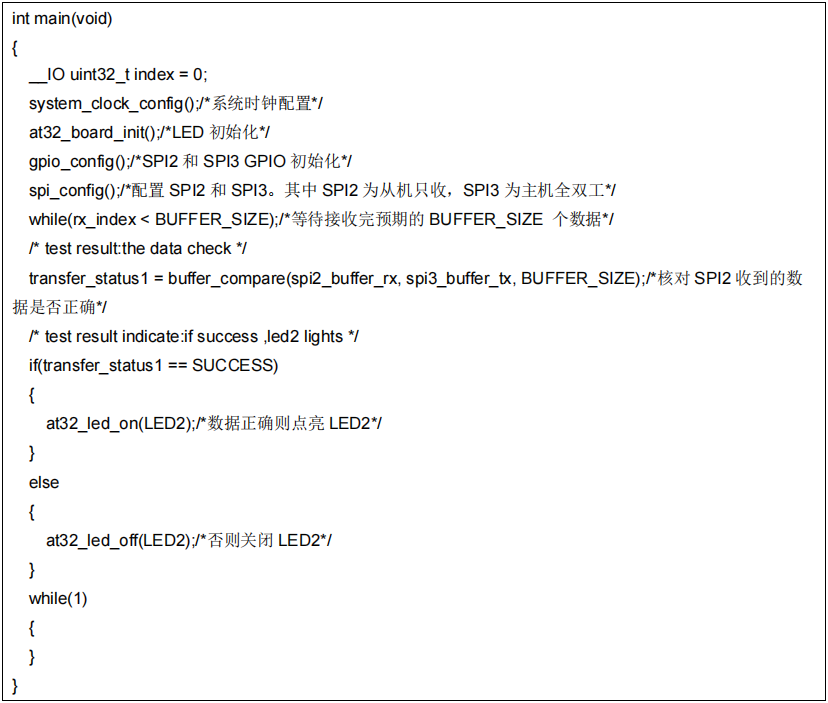
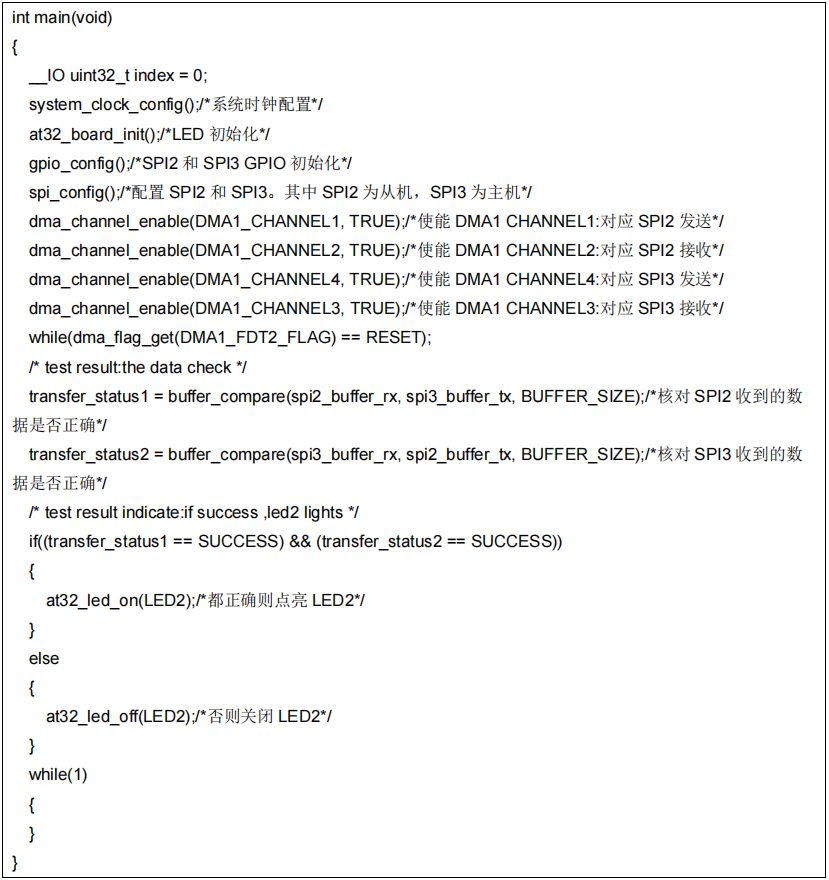
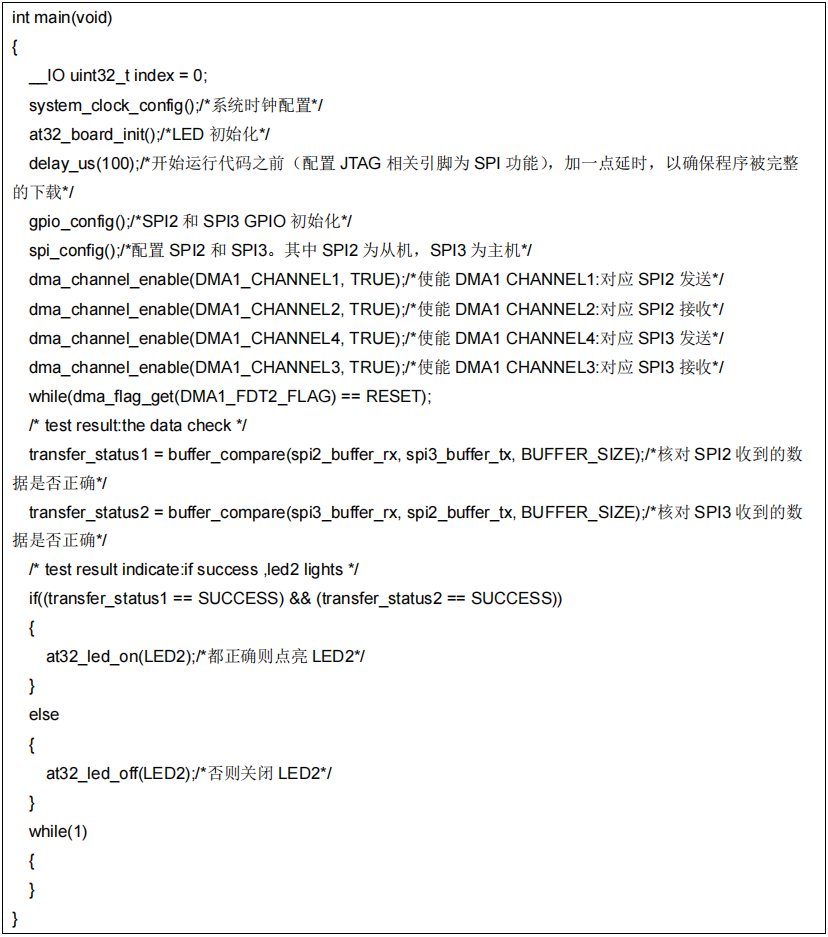
main函數代碼描述
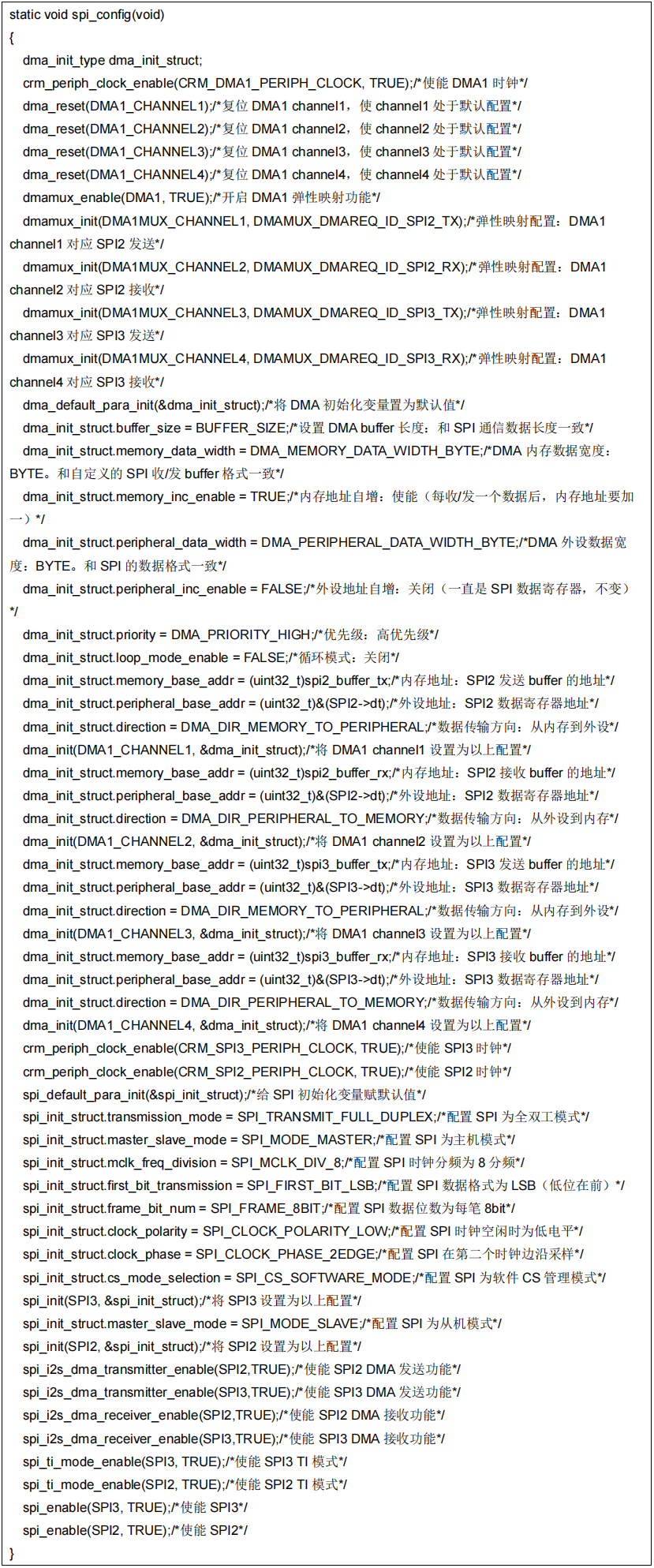
SPI通信配置函數代碼描述
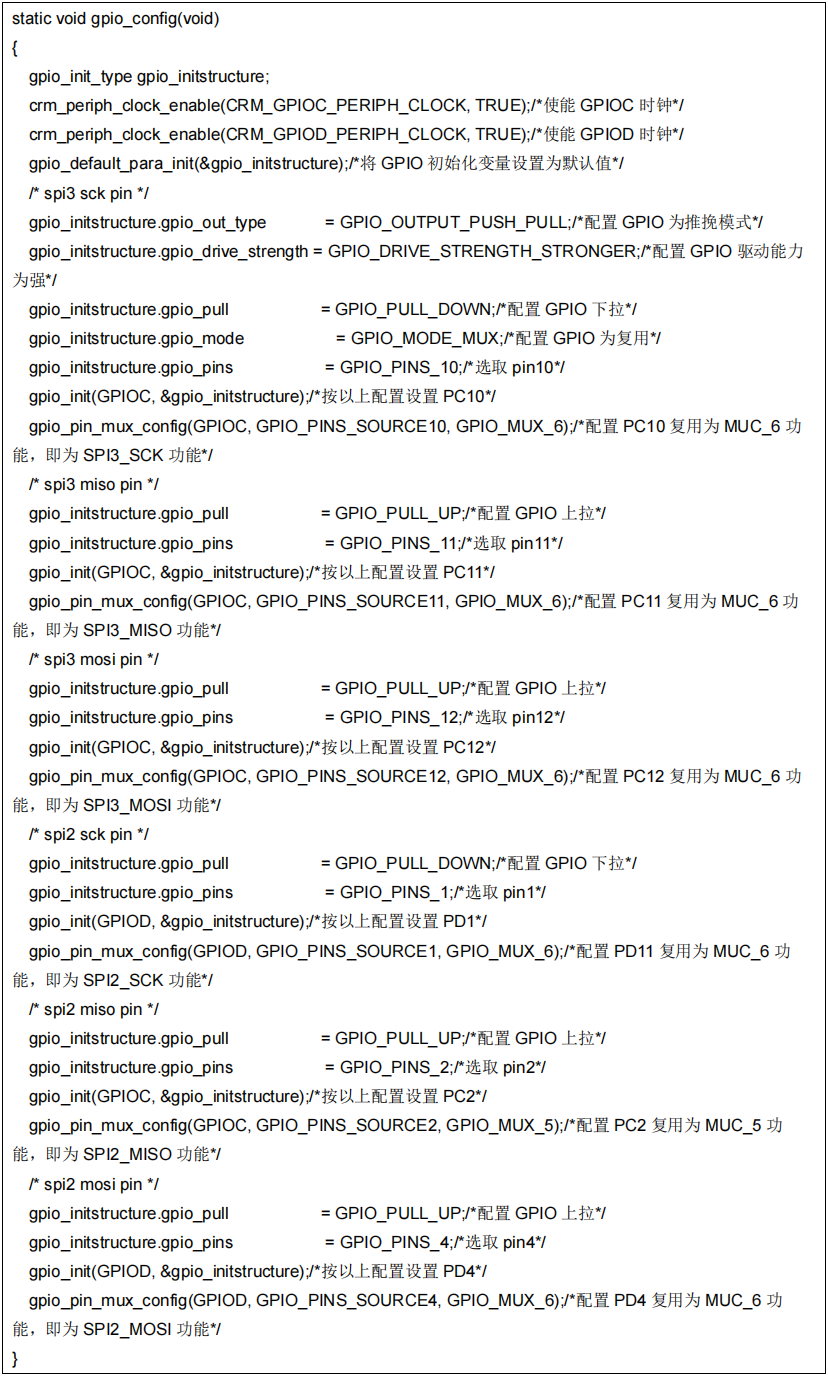
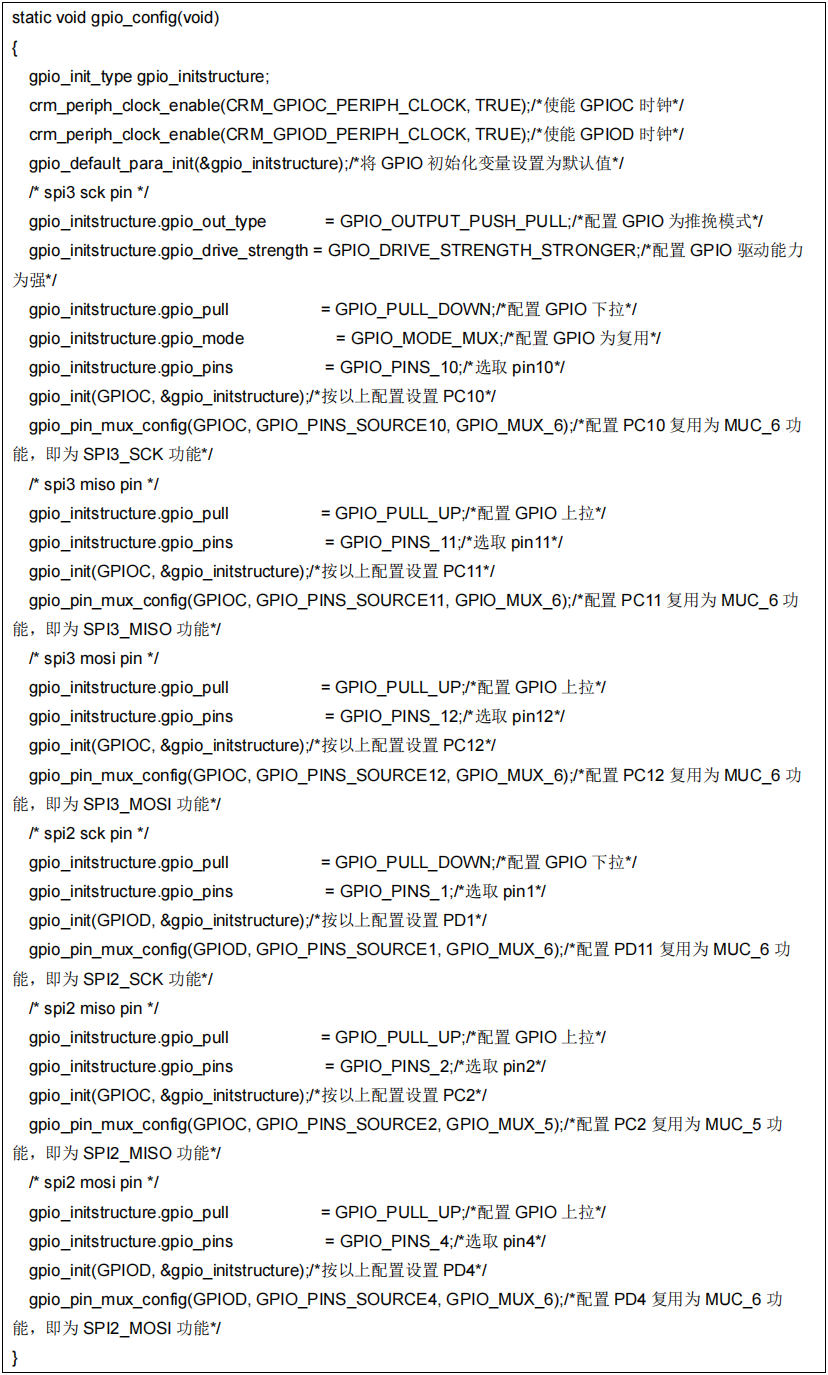
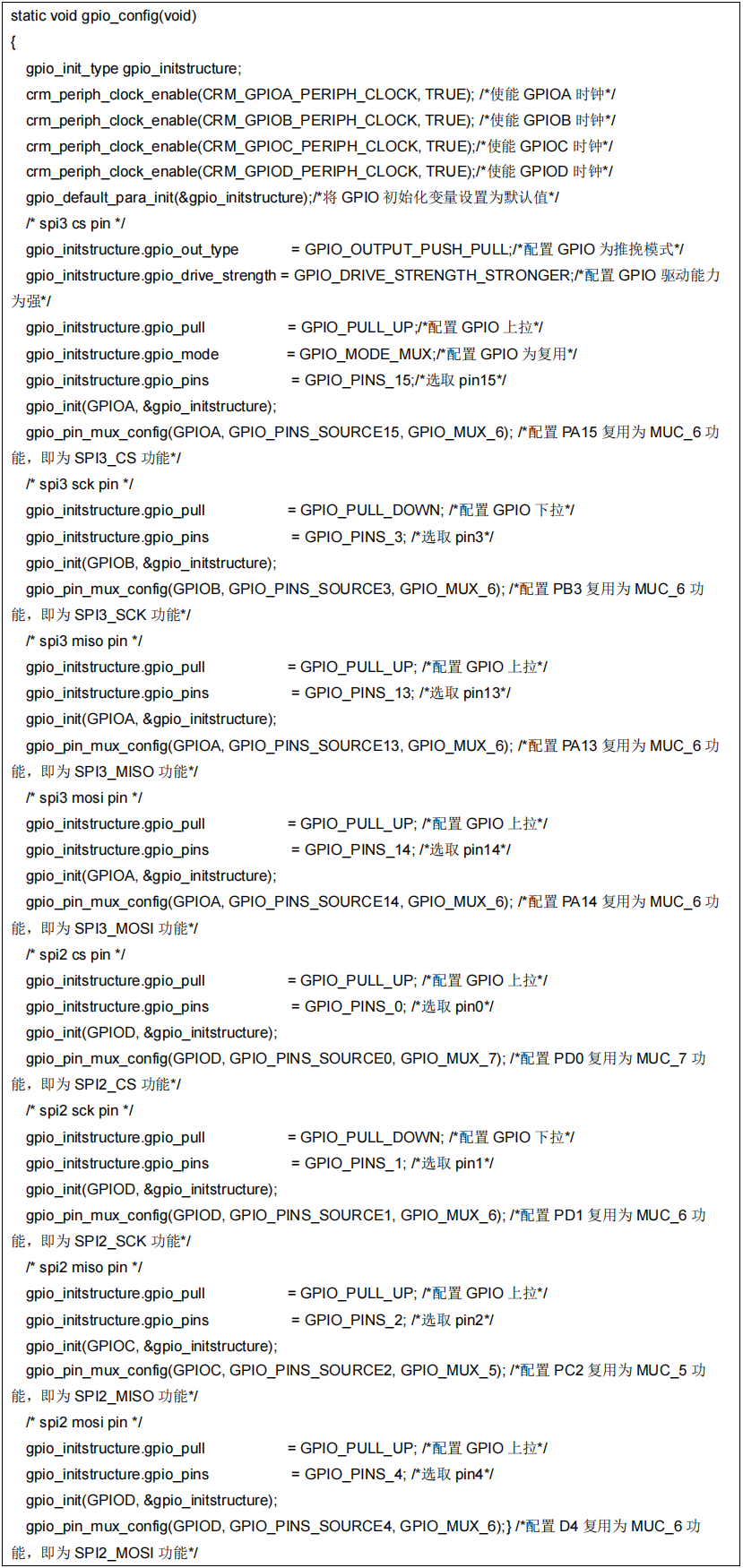
SPI GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
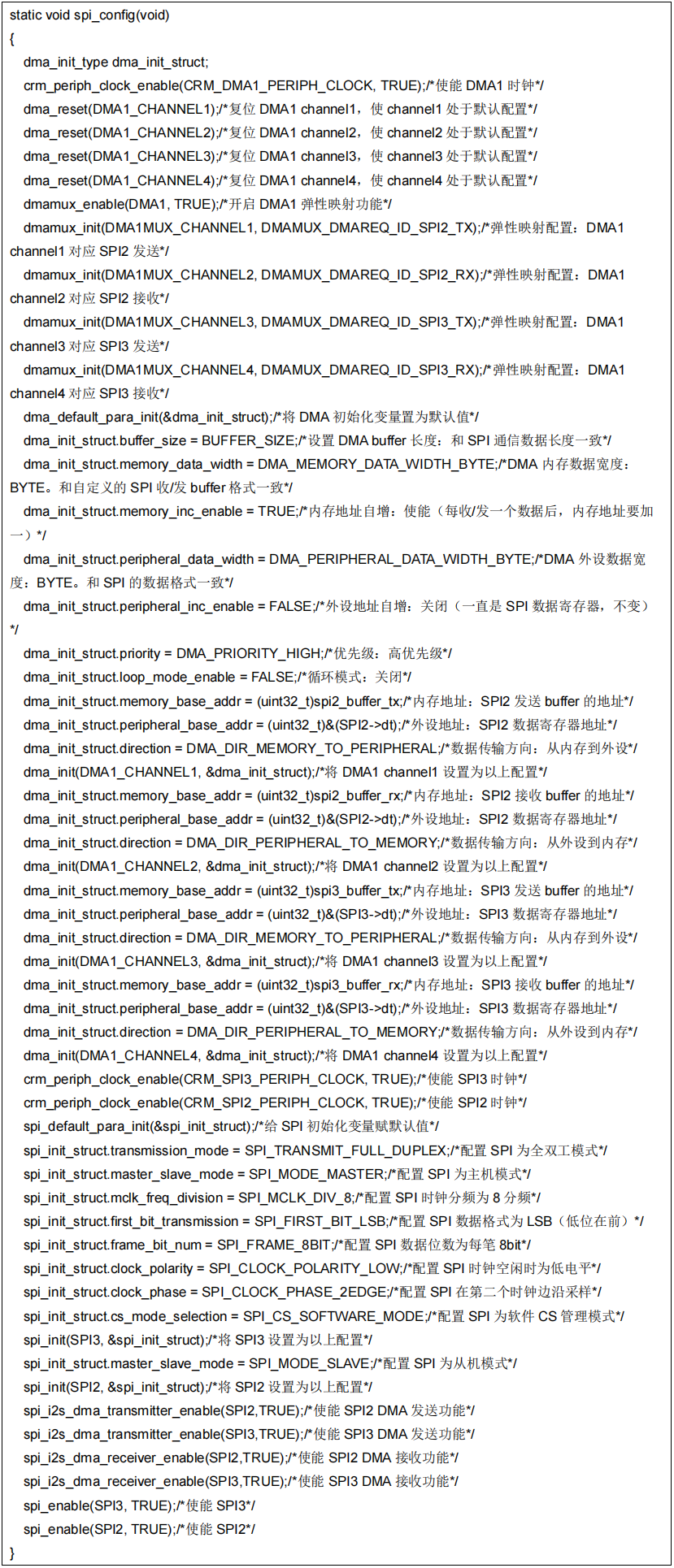
案例2-SPI全雙工DMA方式通信
功能簡介
實現SPI2和SPI3之間的全雙工DMA通信。 接線如下:
SPI2 SPI3
PD1(短短板)<--->PC10(短單)
PC2(味噌)<--->PC11(味噌)
PD4(莫西)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesspimotorola_fullduplex_dma
軟件設計
1)配置流程
配置SPI2和SPI3對應的GPIO;
配置SPI2和SPI3的通信配置和DMA配置;
開始DMA通信。
2)代碼介紹
main函數代碼描述
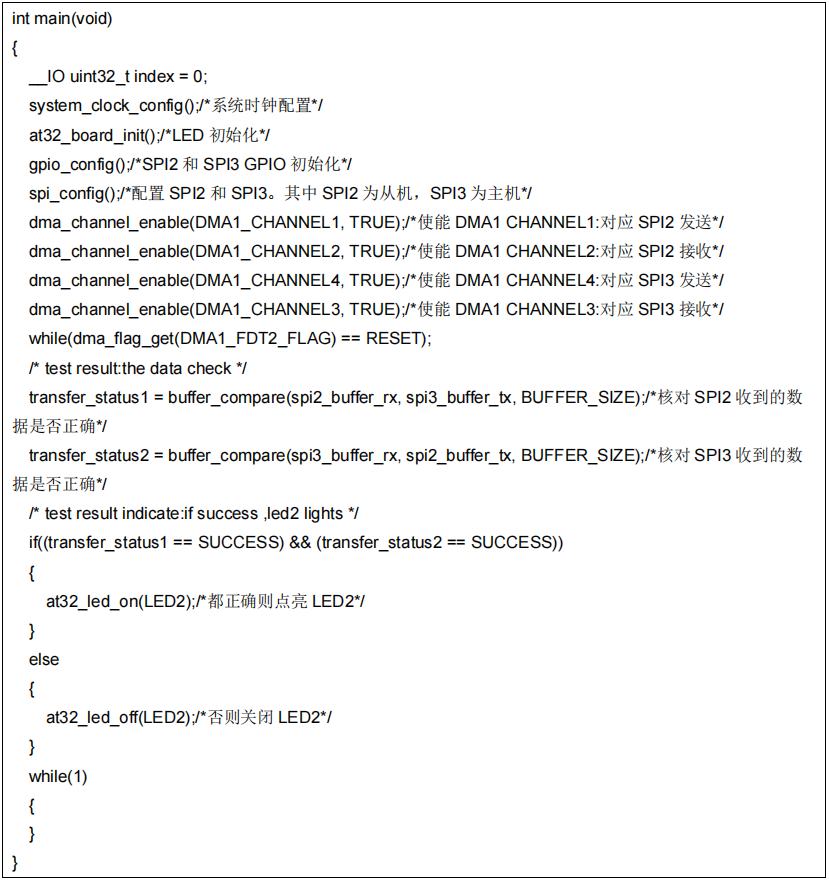
SPI通信配置及DMA配置函數代碼描述
SPI GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
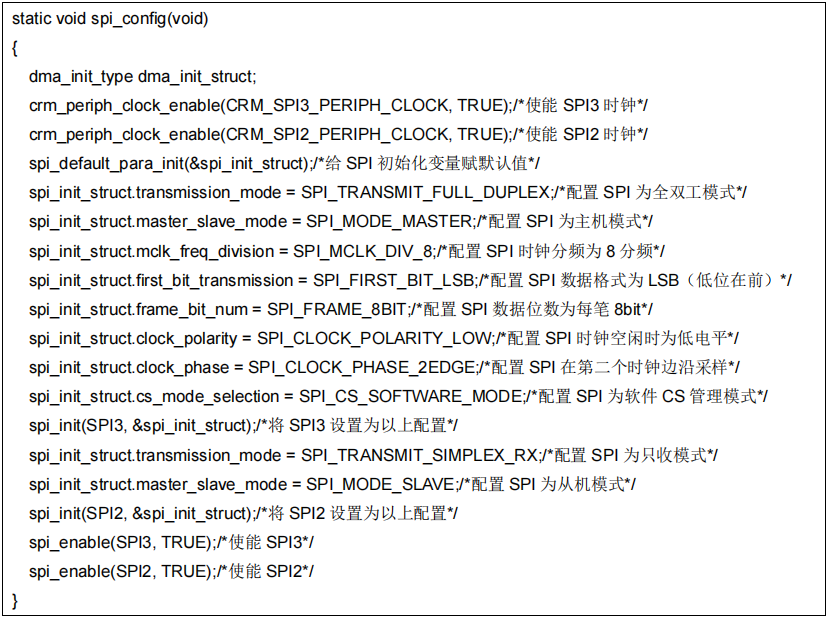
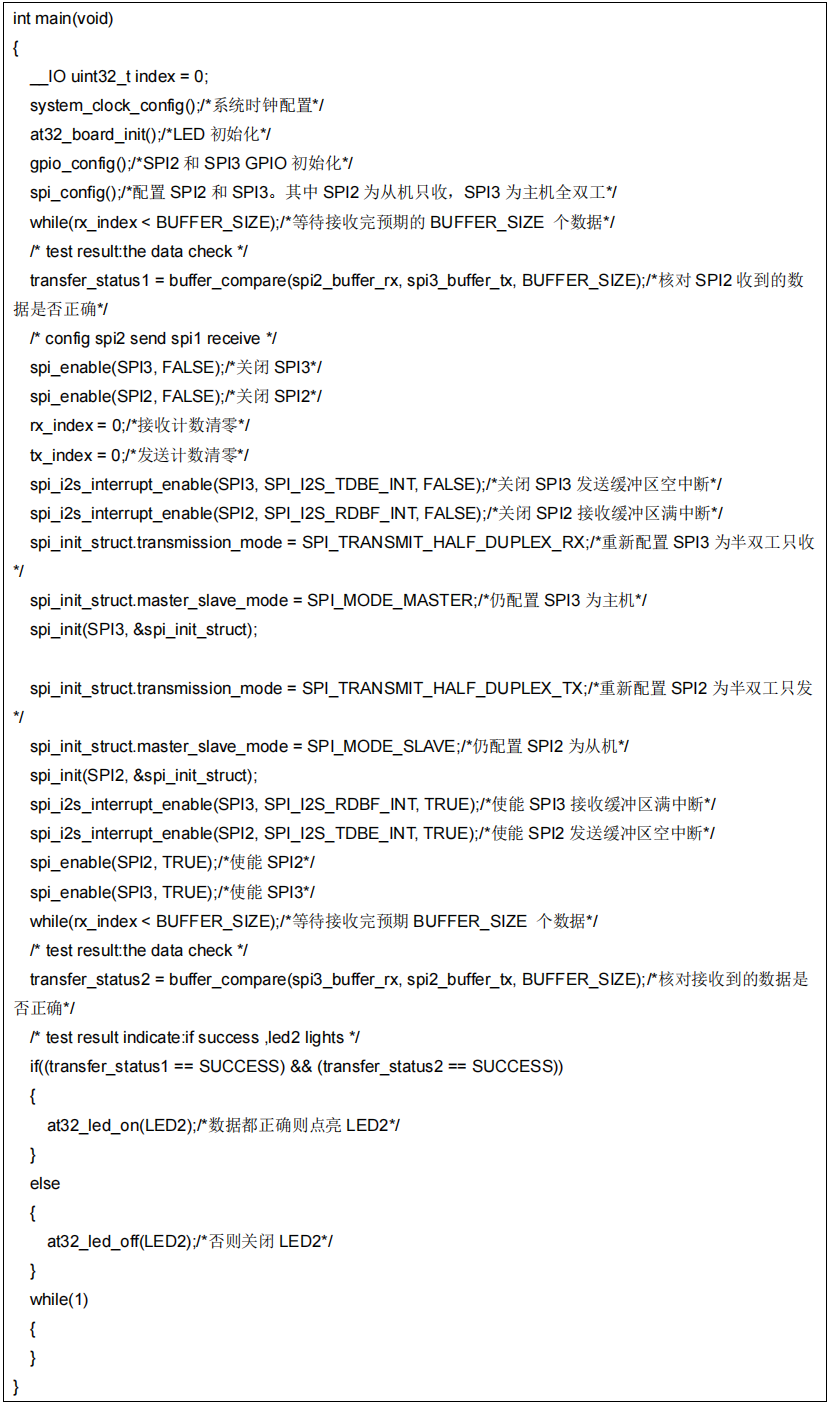
案例3-SPI只收通信
功能簡介
實現SPI2和SPI3之間的單向只收通信。 接線如下:
SPI2 SPI3
PD1(短短板)<--->PC10(短單)
PD4(莫西)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesspionly_receive_mode_polling
軟件設計
1)配置流程
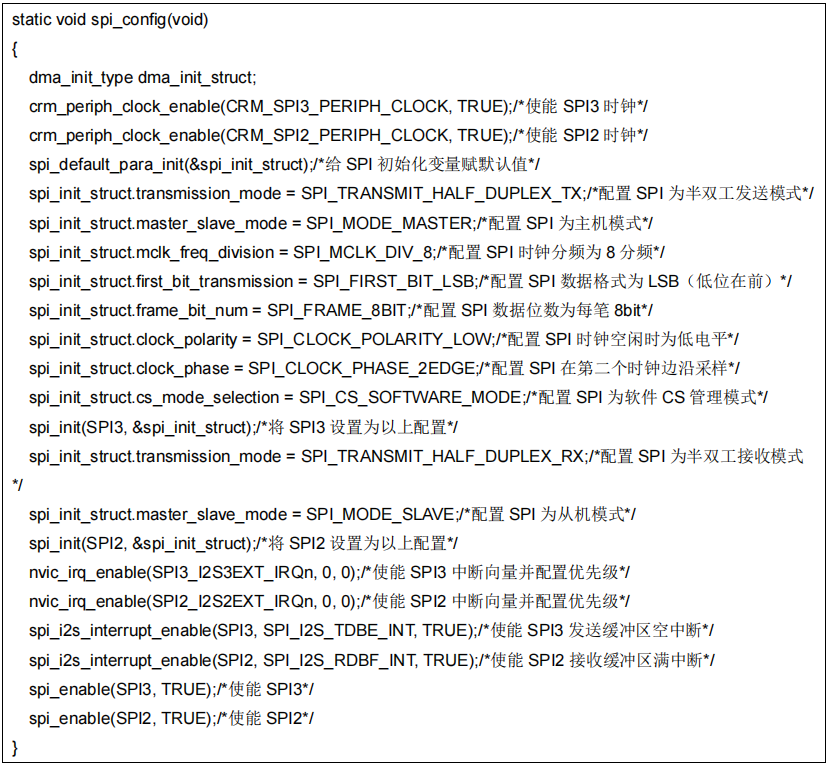
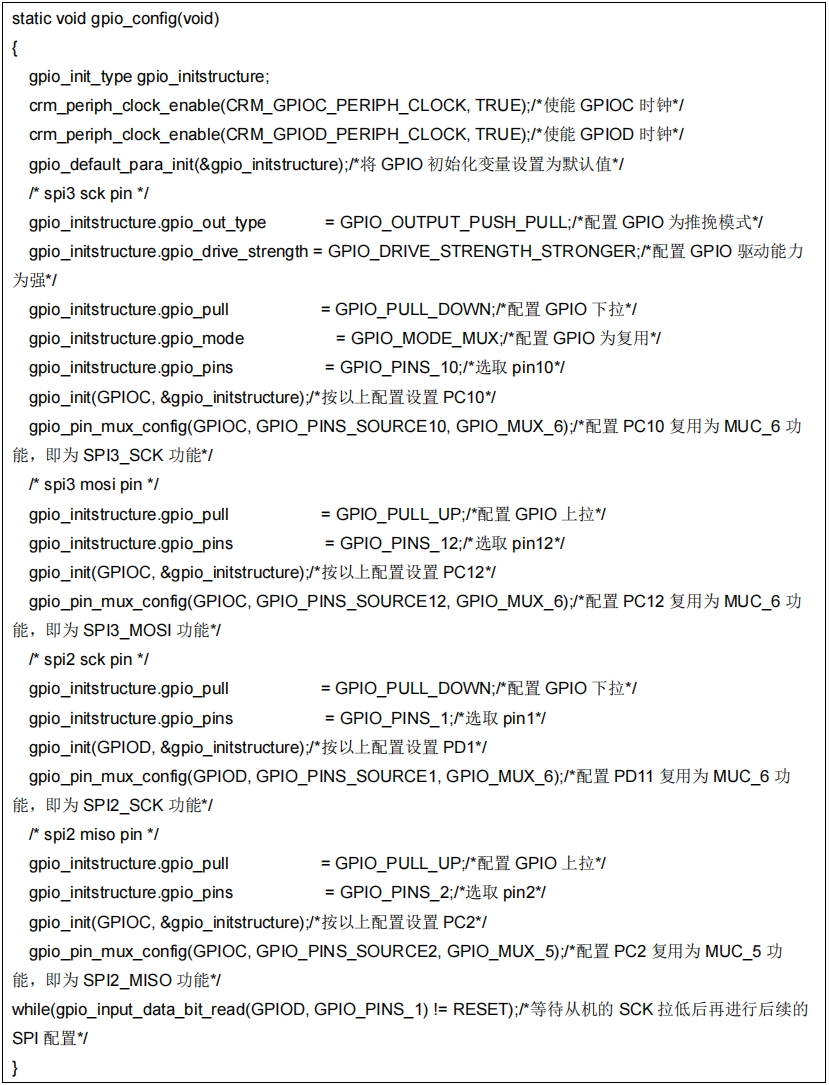
配置SPI2和SPI3對應的GPIO;
配置SPI2和SPI3的通信配置;
開始輪詢通信。
2)代碼介紹
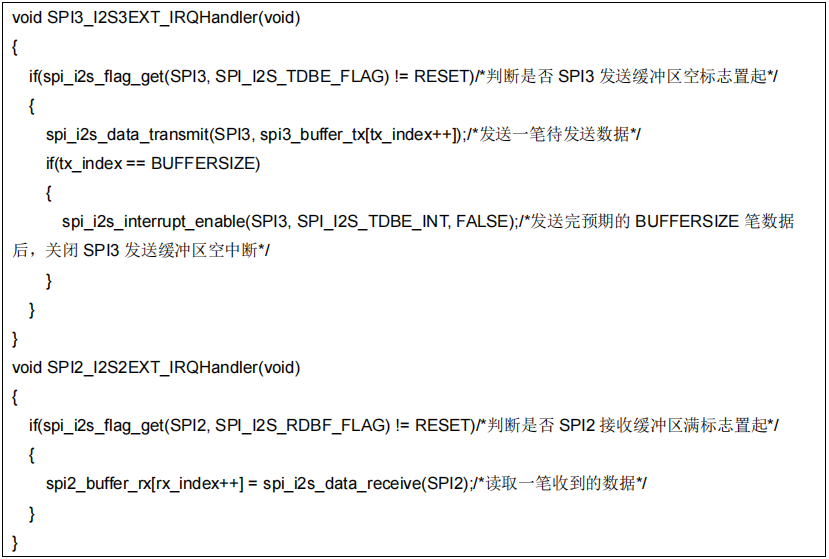
main函數代碼描述
SPI通信配置代碼描述
SPI GPIO配置函數代碼描述

實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
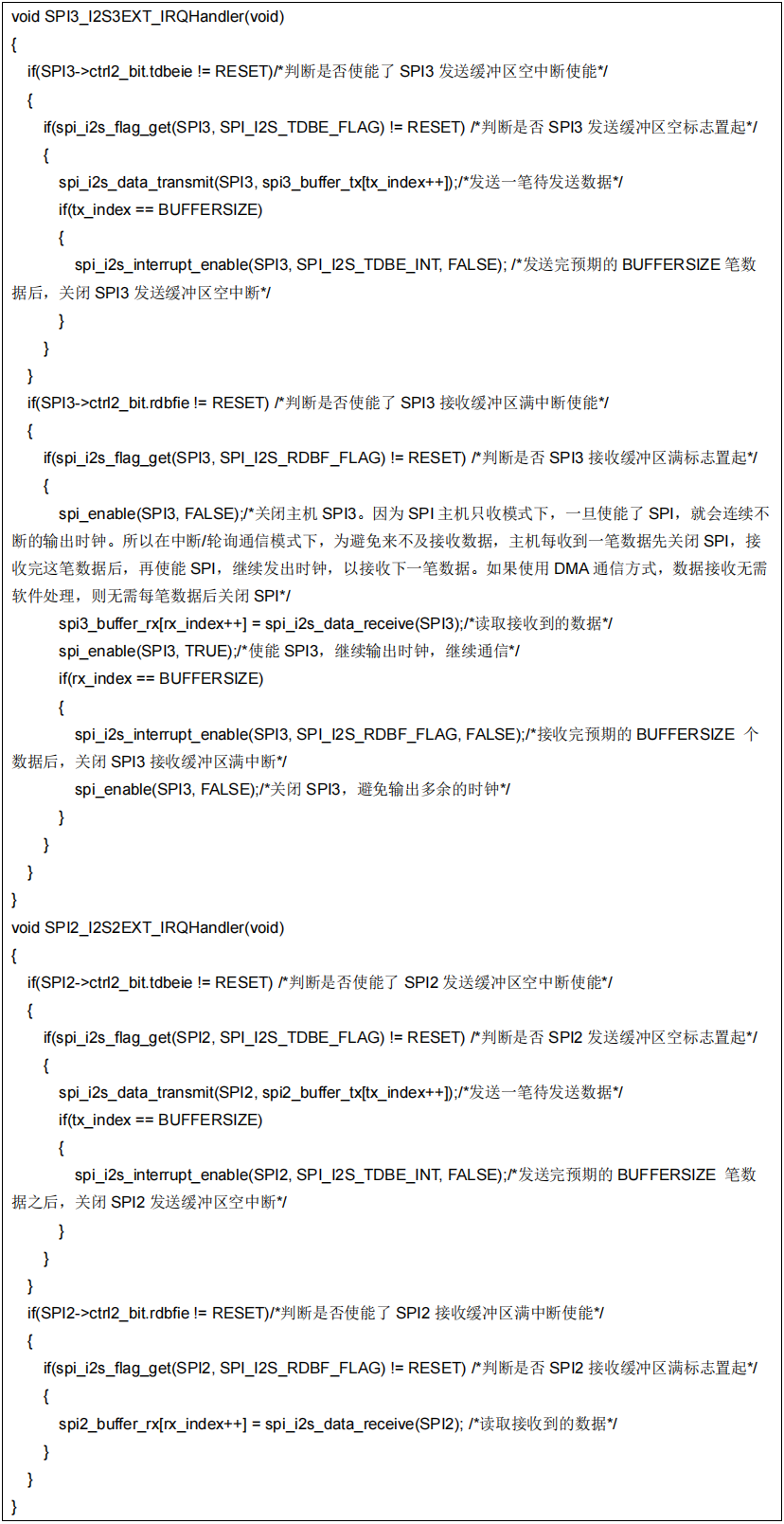
案例4-SPI半雙工中斷方式通信
功能簡介
實現SPI2和SPI3之間的半雙工通信。 接線如下:
SPI2 SPI3
PD1(短短板)<--->PC10(短單)
PC2(味噌)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_xxxxexamplesspihalfduplex_interrupt
軟件設計
1)配置流程
配置SPI2和SPI3對應的GPIO;
設置SPI2和SPI3的中斷處理函數;
配置SPI2和SPI3的通信配置;
開始中斷通信。
2)代碼介紹
main函數代碼描述
中斷處理函數代碼描述
SPI通信配置函數代碼描述
SPI GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
案例5-SPI半雙工中斷方式通信-加收發切換
功能簡介
實現SPI2和SPI3之間的半雙工收發切換通信。 接線如下:
SPI2 SPI3
PD1(短短板)<--->PC10(短單)
PC2(味噌)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesspihalfduplex_transceiver_switch
軟件設計
1)配置流程
配置SPI2和SPI3對應的GPIO;
設置SPI2和SPI3的中斷處理函數;
配置SPI2和SPI3的通信配置;
開始中斷通信。
2)代碼介紹
main函數代碼描述
中斷處理函數代碼描述
SPI通信配置函數代碼描述

SPI GPIO配置函數代碼描述

實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
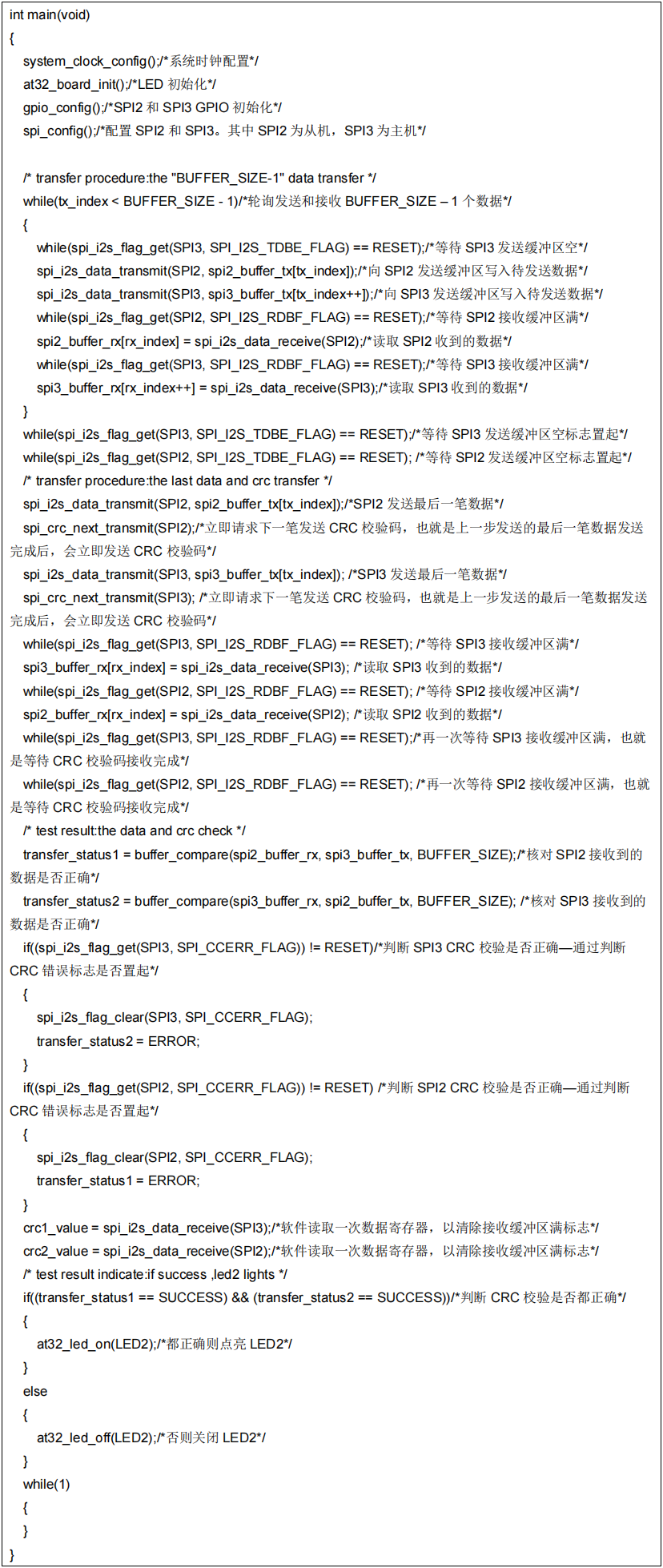
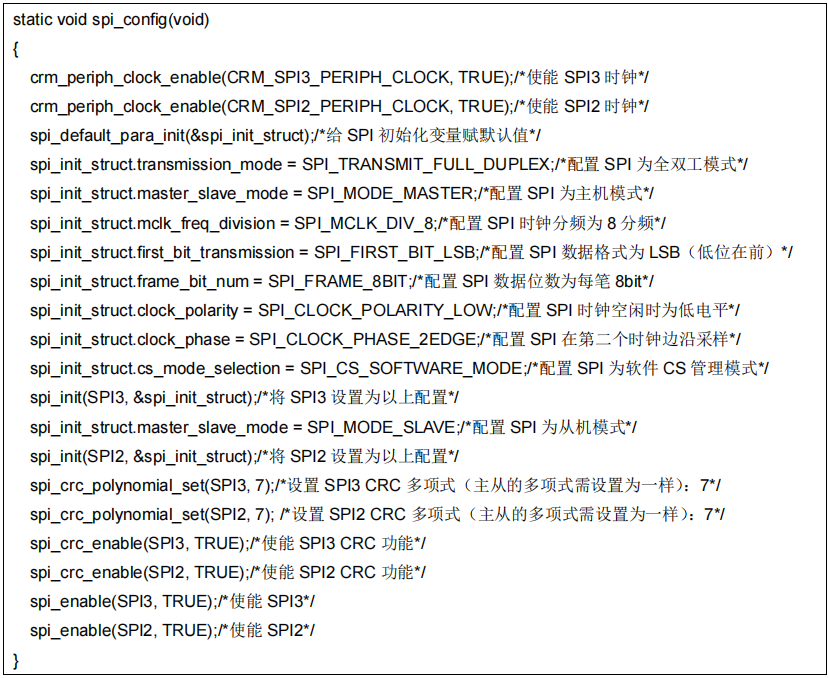
案例6-SPI CRC功能使用
功能簡介
實現SPI2和SPI3之間的全雙工通信和CRC校驗。 接線如下:
SPI2 SPI3
PD1(短短板)<--->PC10(短單)
PC2(味噌)<--->PC11(味噌)
PD4(莫西)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesspicrc_transfer_polling
軟件設計
1)配置流程
配置SPI2和SPI3對應的GPIO;
配置SPI2和SPI3通信配置;
開始輪詢通信和CRC校驗。
2)代碼介紹
main函數代碼描述
SPI通信配置函數代碼描述
SPI GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
案例7-SPI TI模式使用(TI SSP協議)
功能簡介
實現SPI2和SPI3之間的TI模式DMA通信。 接線如下:
SPI2 SPI3
PD0(CS)<--->PA4(CS)
PD1(短短板)<--->PC10(短單)
PC2(味噌)<--->PC11(味噌)
PD4(莫西)<--->PC12(莫西)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesspi i_fullduplex_dma
軟件設計
1)配置流程
配置SPI2和SPI3對應的GPIO;
配置SPI2和SPI3的通信配置和DMA配置;
開始DMA通信。
2)代碼介紹
main函數代碼描述
SPI通信配置及DMA配置函數代碼描述
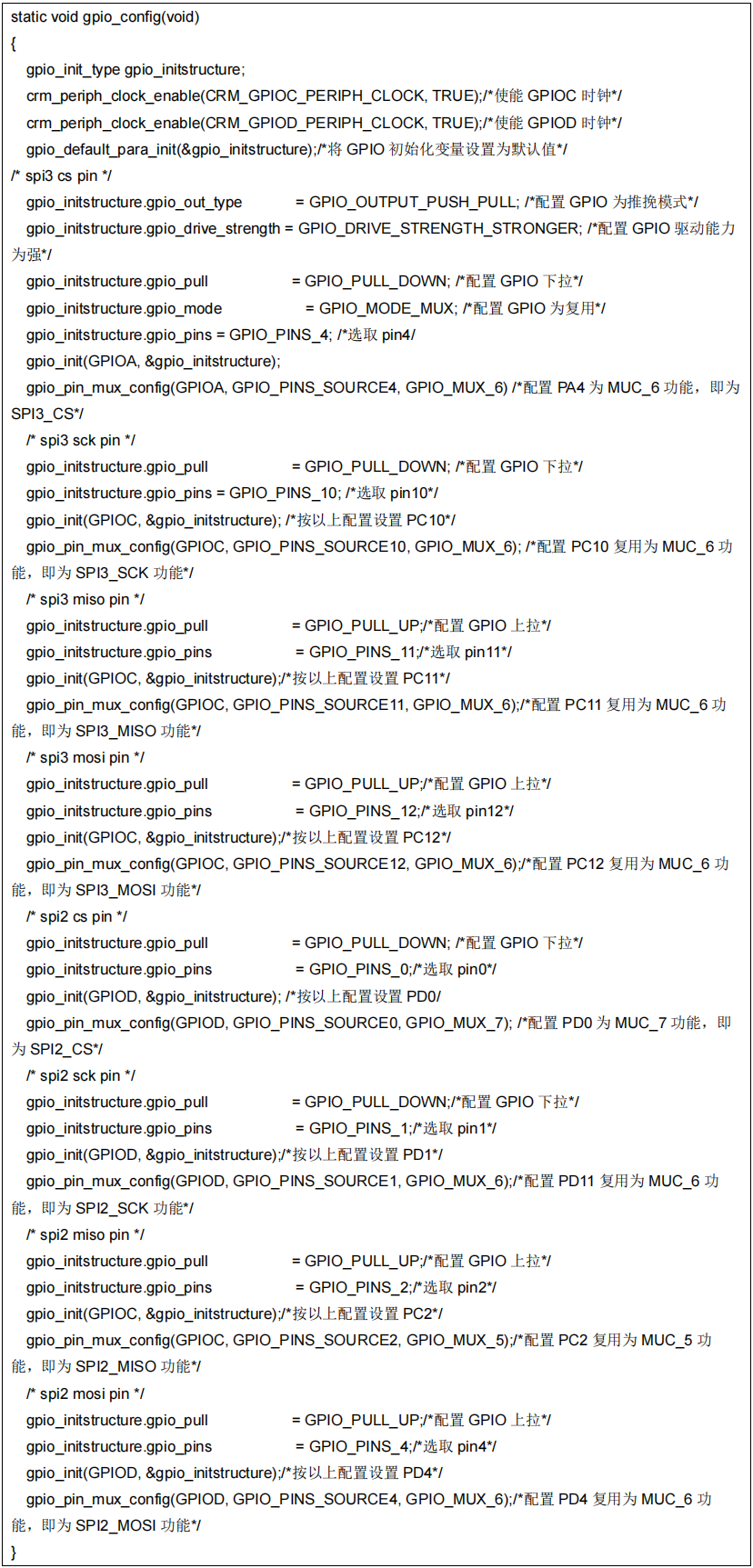
SPI GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
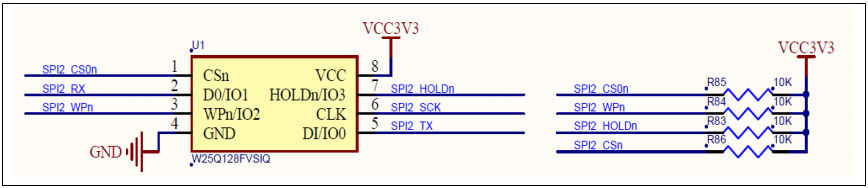
案例8-SPI讀寫FLASH(W25Q128)
功能簡介
實現SPI2讀/寫flash(w25q128)。 接線如下:
SPI2 W25Q128
PD0(CS)<--->CS 引腳
PD1(單片)<--->CLK引腳
PC2(味噌)<--->引腳
PD4(MOSI)<--->DO引腳
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD和w25q128電路板
w25q128建議電路如下圖26:
圖26 w25q128建議電路
2)軟件環境:
projectat_start_f437examplesspiw25q_flash
軟件設計
1)配置流程
配置SPI2和對應GPIO;
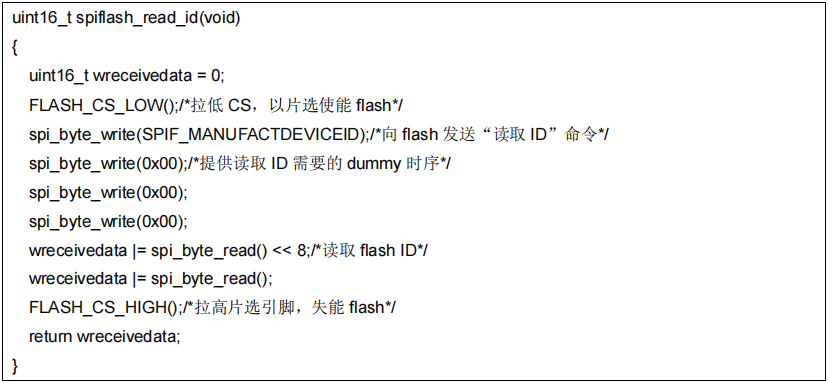
讀取flash ID;
擦除flash扇區;
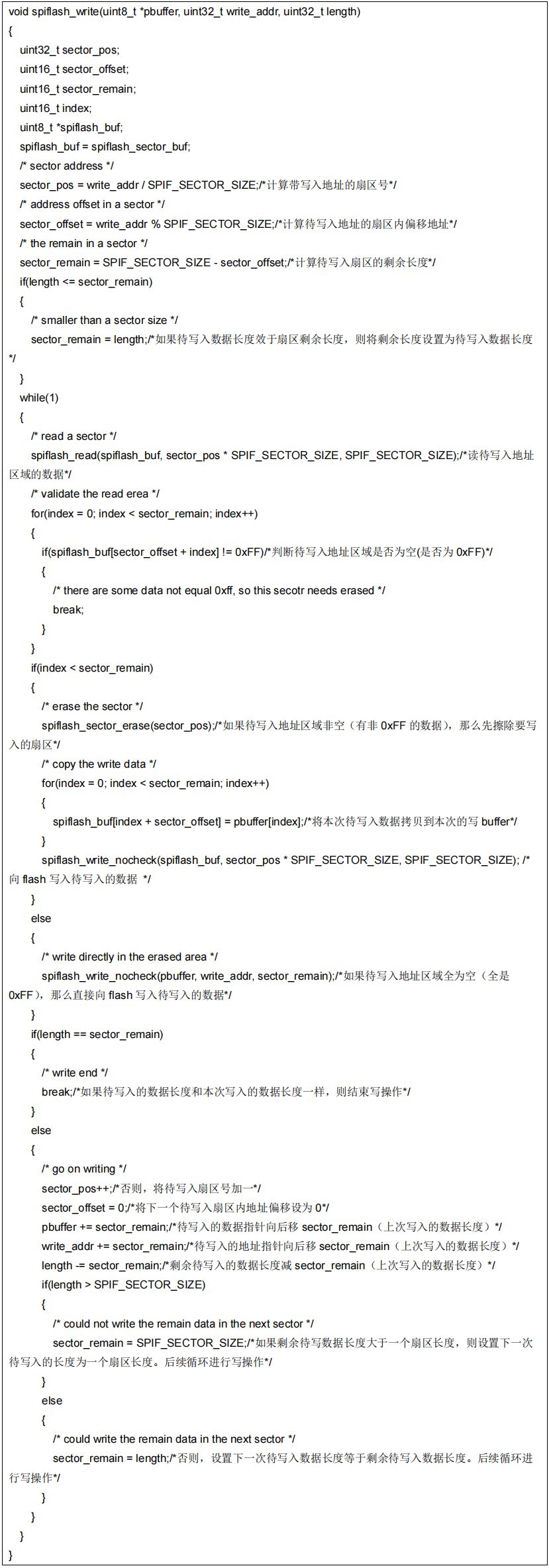
向flash寫入數據;
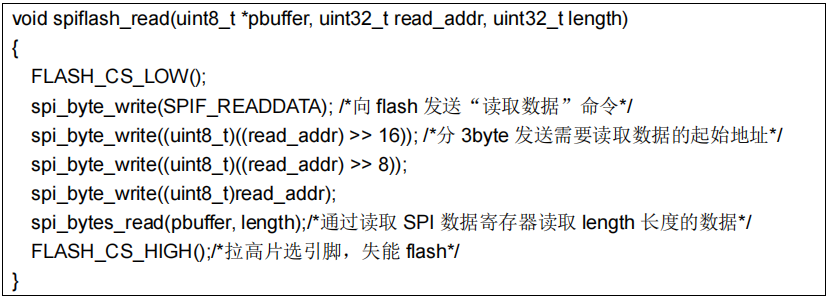
讀取上一步flash寫入數據的區域。
2)代碼介紹
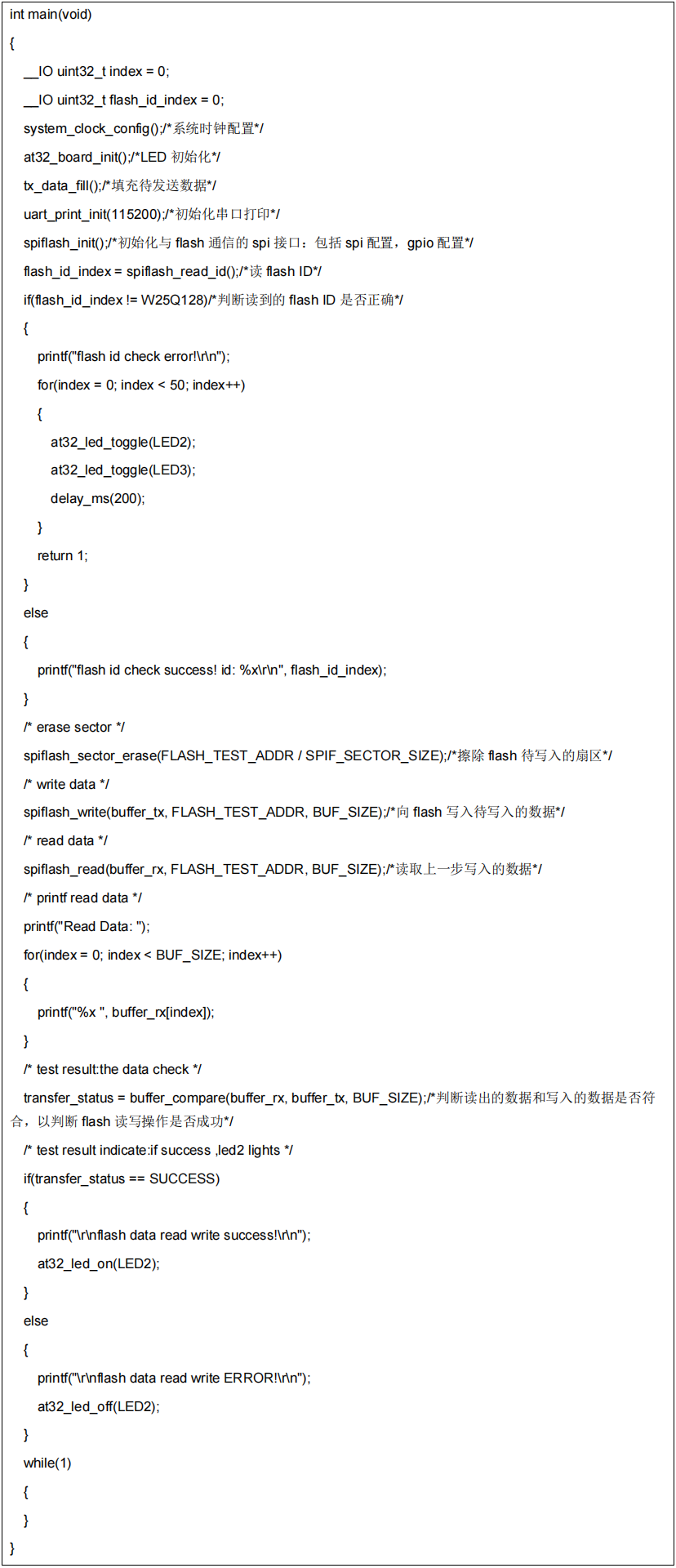
main函數代碼描述
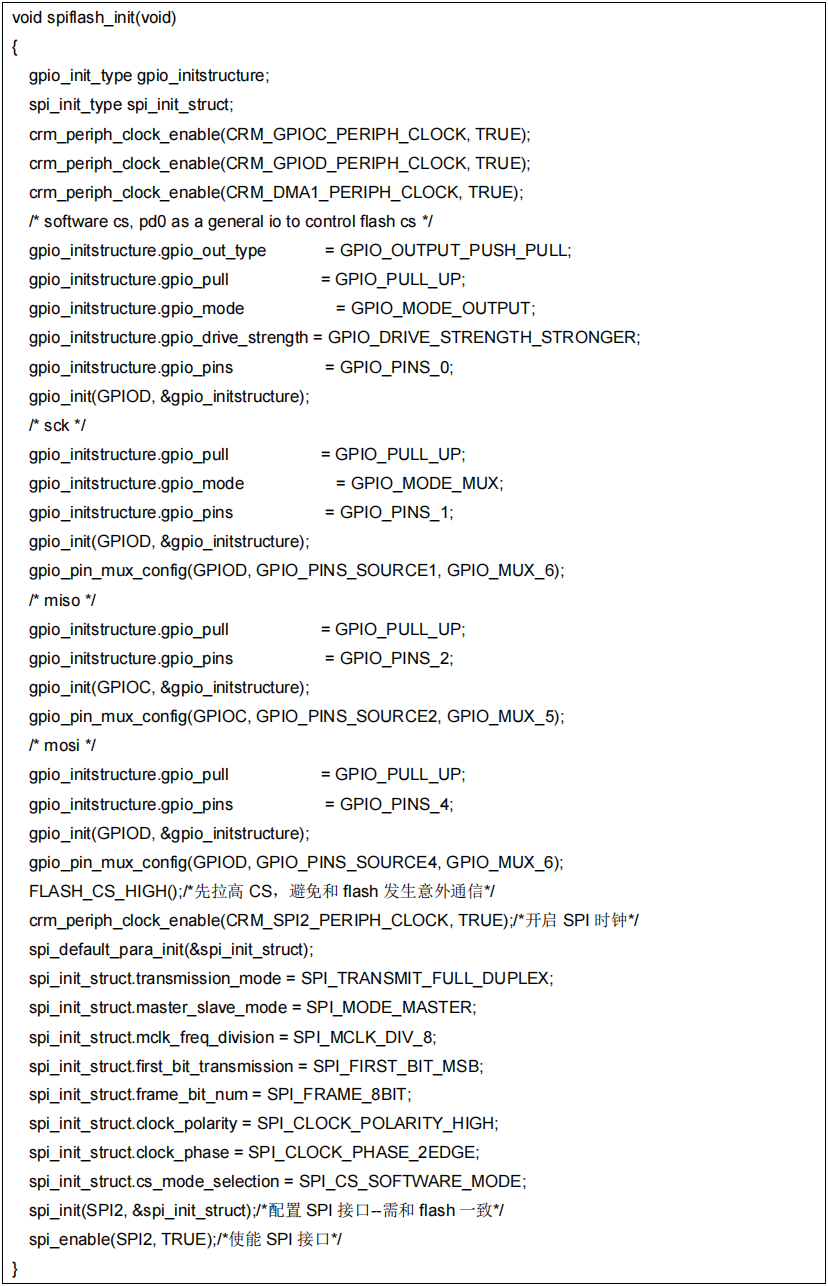
spi接口配置函數和gpio配置函數代碼描述
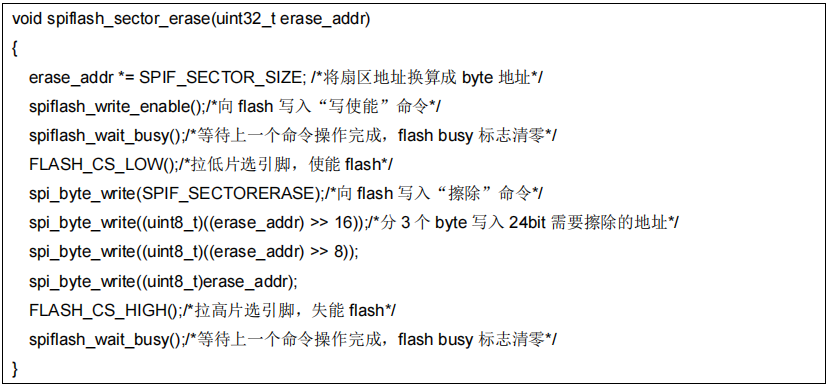
flash擦除函數代碼描述
flash讀數據函數代碼描述
flash讀ID函數代碼描述
flash寫函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和FLASH通信正常。
案例9-SPI使用jtag引腳的配置
功能簡介
實現SPI2和SPI3之間,使用特殊的jtag引腳的全雙工輪詢通信。 接線如下:
SPI2 SPI3
PD0(CS)<--->PA15(CS)
PD1(sck)<--->pb3(sck)
PC2(味噌)<--->PA13(味噌)
PD4(運動)<--->PA14(運動)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesuse_jtagpin_hardwarecs_dma
軟件設計
注意:本文僅介紹了AT32F435/F437的SPI使用jtag引腳的配置,其他型號的使用配置稍有不同,請參照對應型號的BSP使用。
1)配置流程
配置SPI2和SPI3對應的GPIO;
配置SPI2和SPI3通信配置;
開始輪詢通信。
2)代碼介紹
main函數代碼描述
SPI通信配置函數代碼描述

SPI GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明SPI2和SPI3通信正常。
I2S案例
案例1-I2S半雙工DMA方式通信
功能簡介
實現I2S2和I2S3之間的半雙工DMA通信。 接線如下:
I2S2 I2S3
PD0(WS)<--->PA4(WS)
PD1(CK)<--->PC10(CK)
PD4(標清)<--->PC12(標清)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesi2shalfduplex_dma
軟件設計
1)配置流程
配置I2S2和I2S3對應的GPIO;
配置I2S2和I2S3的通信配置和DMA配置;
開始DMA通信。
2)代碼介紹
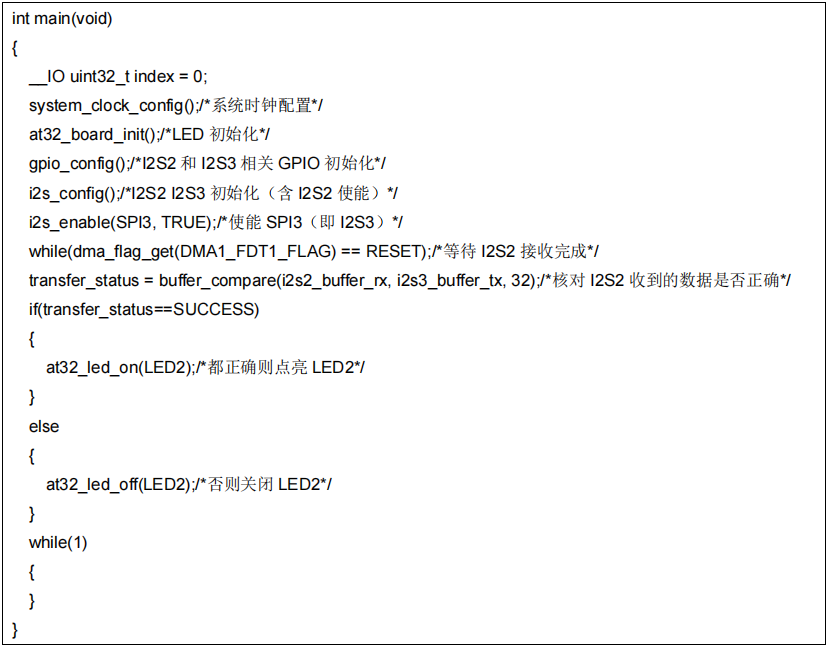
main函數代碼描述
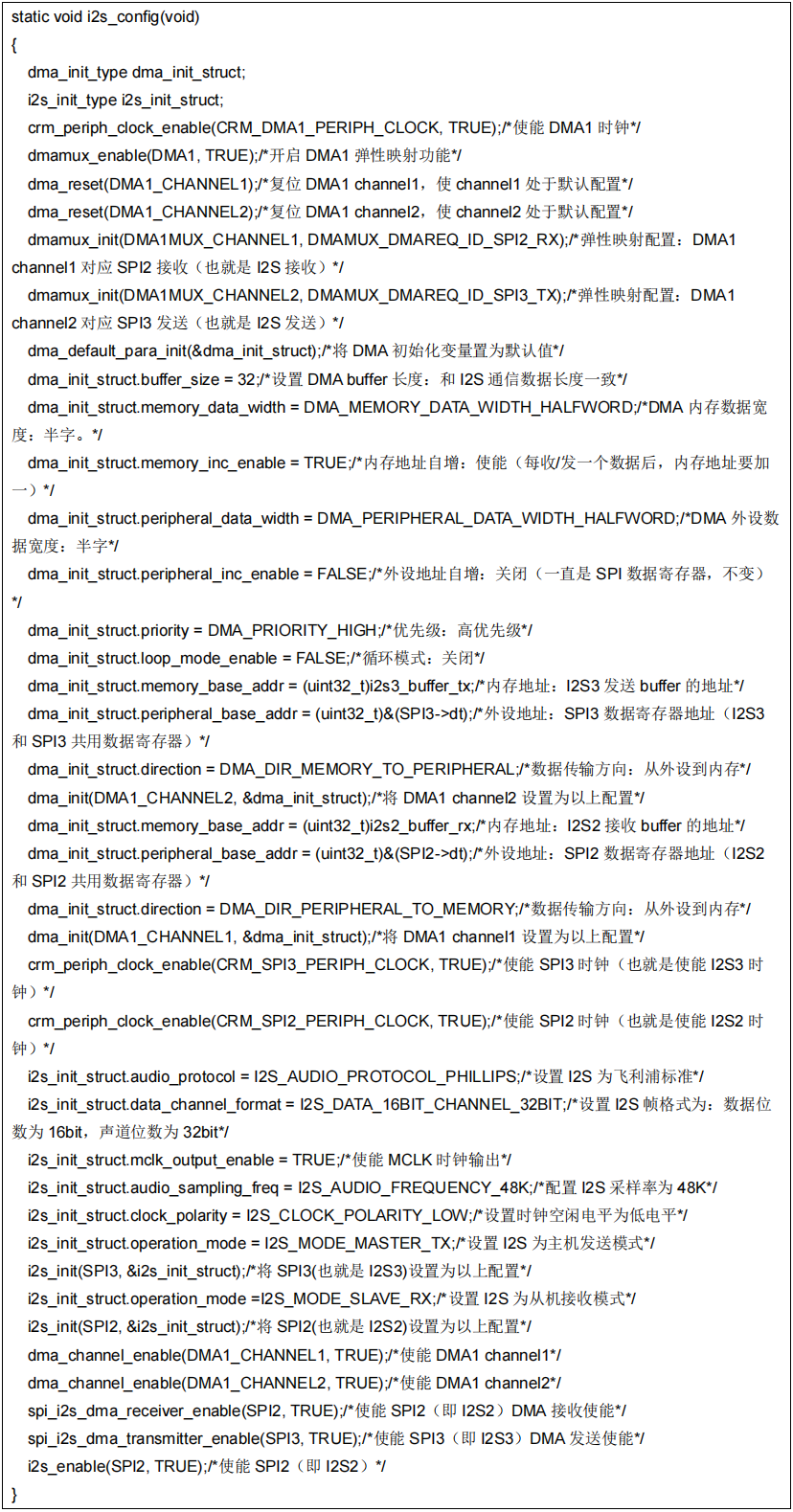
I2S配置及DMA配置函數代碼描述
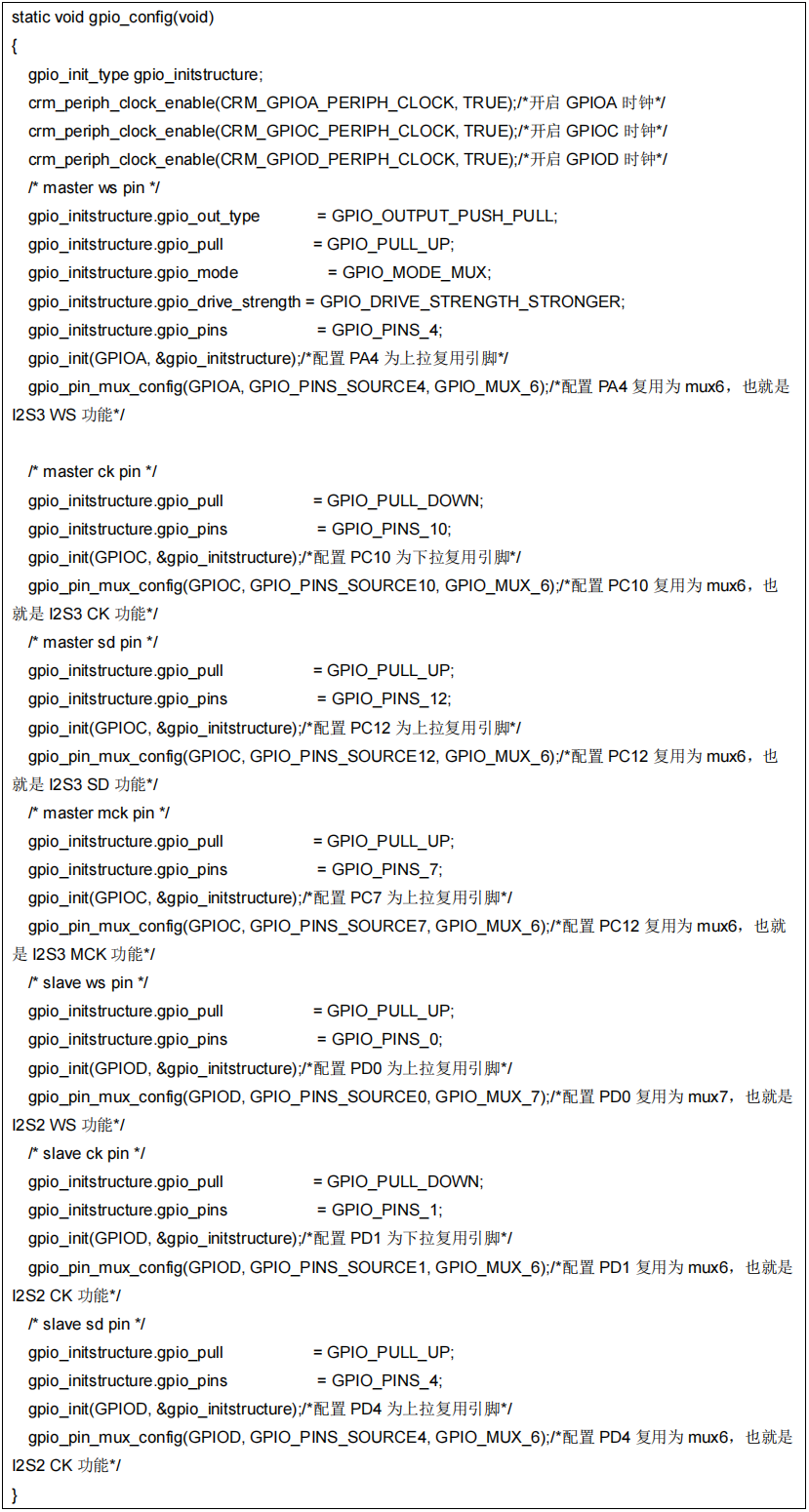
GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明I2S2和I2S3通信正常。
案例2-I2S半雙工中斷方式通信
功能簡介
實現I2S2和I2S3之間的半雙工中斷方式通信。 接線如下:
I2S2 I2S3
PD0(WS)<--->PA4(WS)
PD1(CK)<--->PC10(CK)
PD4(標清)<--->PC12(標清)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesi2shalfduplex_interrupt
軟件設計
1)配置流程
配置I2S2和I2S3對應的GPIO;
配置I2S2和I2S3的通信配置;
安排中斷功能;
開始中斷通信。
2)代碼介紹
main函數代碼描述
I2S配置函數代碼描述
I2S中斷配置函數代碼描述
GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明I2S2和I2S3通信正常。
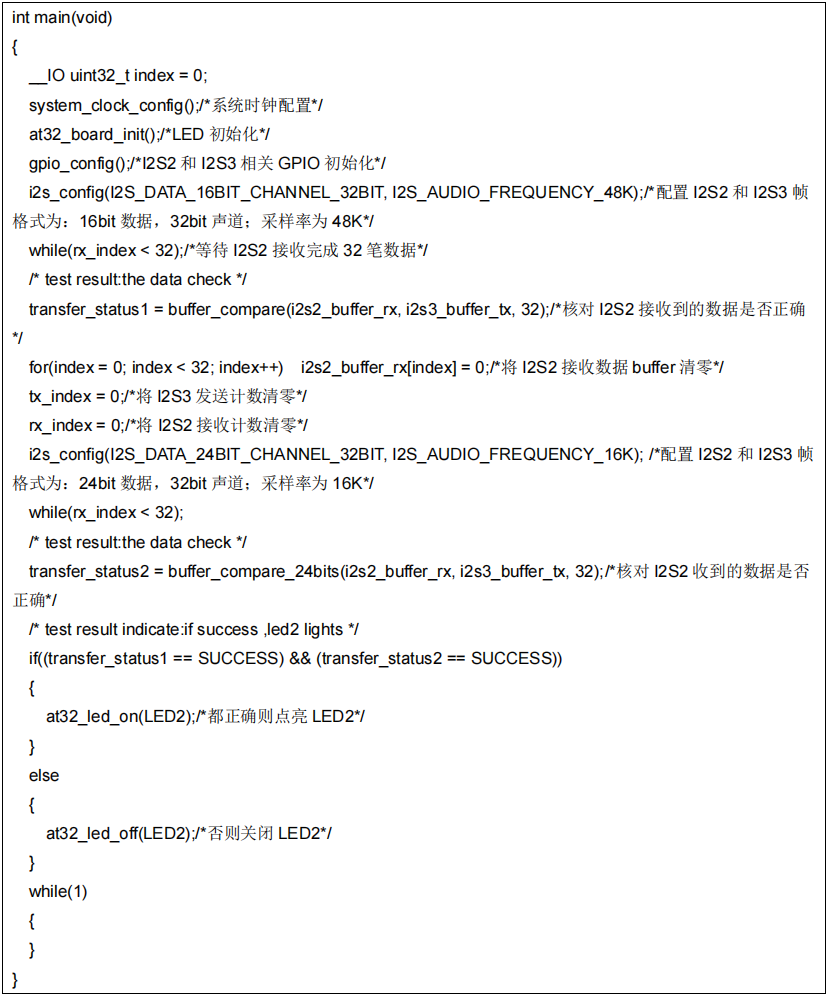
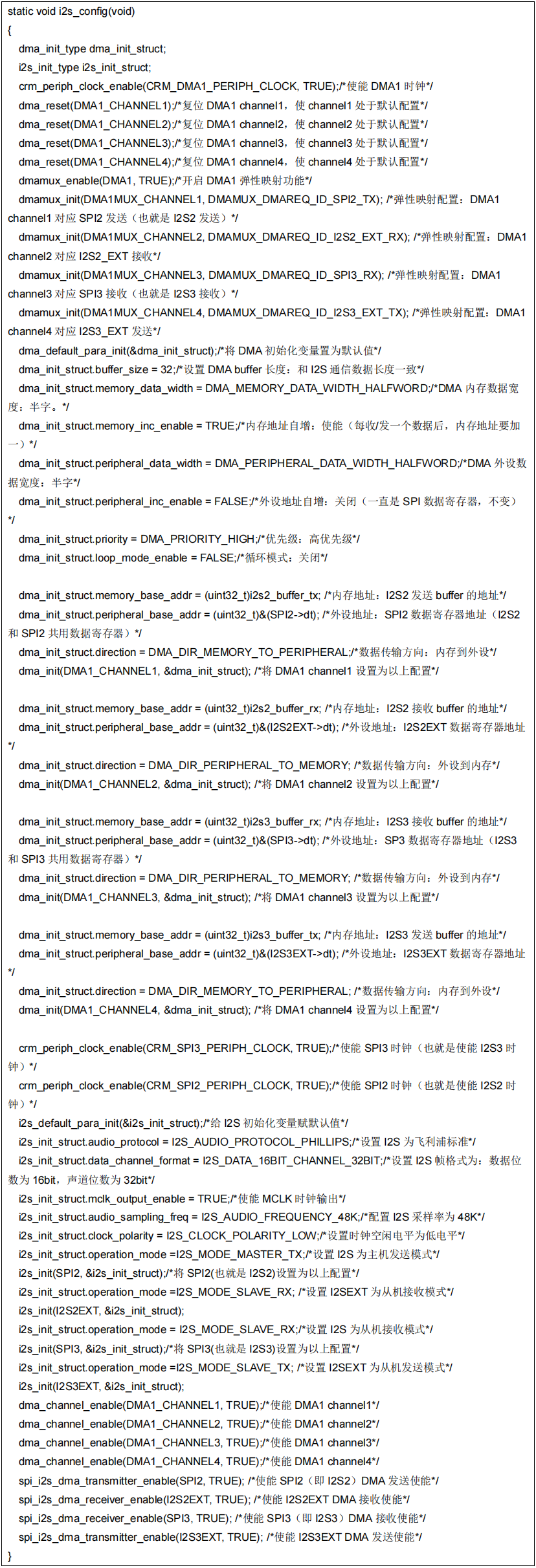
案例3-AT32F403A/F407/F435/F437 I2S全雙工DMA方式通信
功能簡介
實現I2S2和I2S3之間的全雙工DMA通信。 接線如下:
I2S2 I2S3
PD0(WS)<--->PA4(WS)
PD1(短短板)<--->PC10(短單)
PC2(ext_sd)Rx<--->pc11(ext_sd)TX
PD4(SD)TX<--->PC12(SD)RX
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_xxxxexamplesi2sfullduplex_dma
軟件設計
1)配置流程
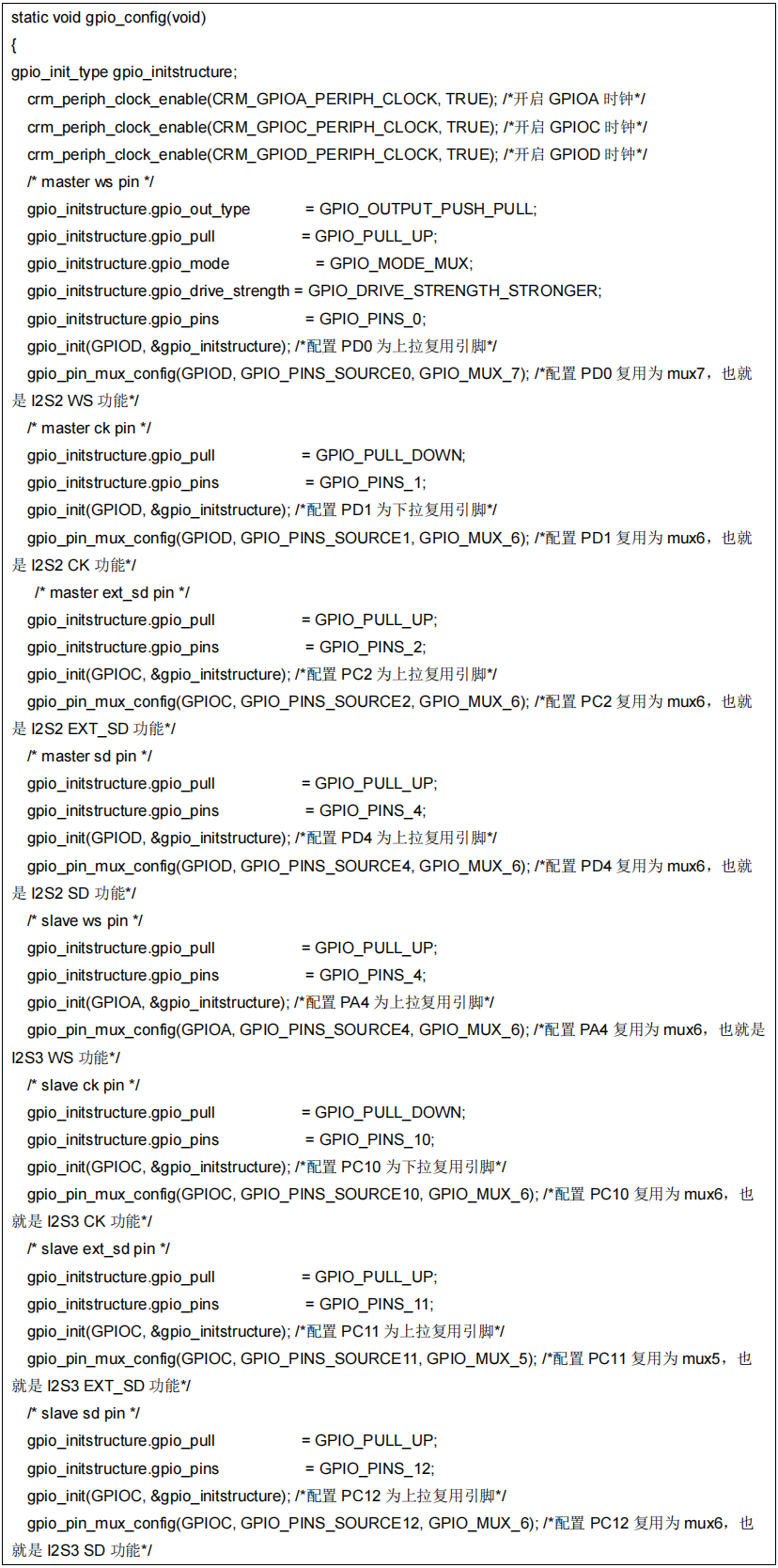
配置I2S2和I2S3對應的GPIO;
配置I2S2和I2S3的通信配置和DMA配置;
開始DMA通信。
2)代碼介紹
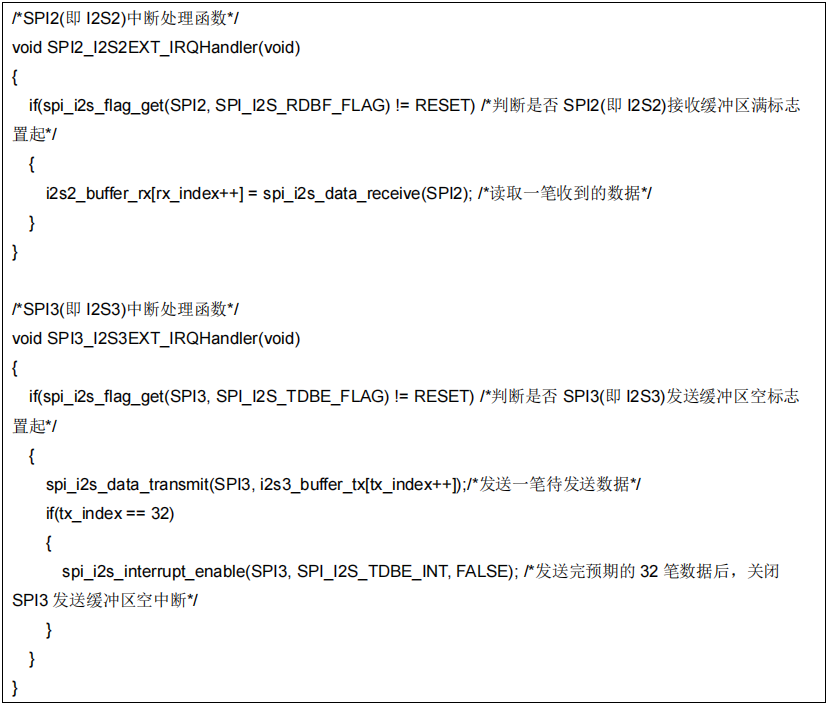
main函數代碼描述
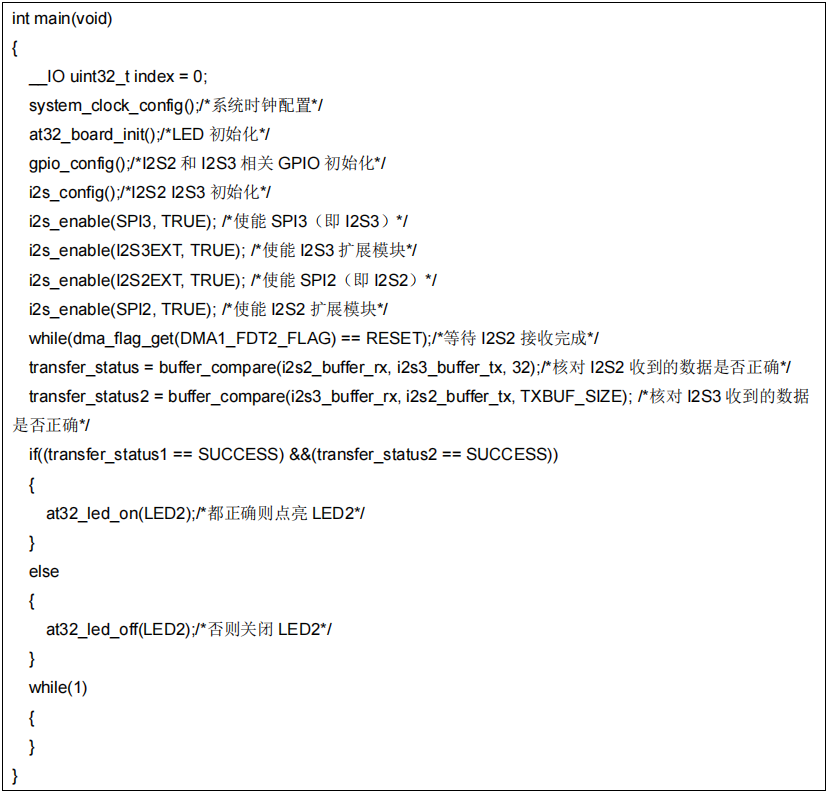
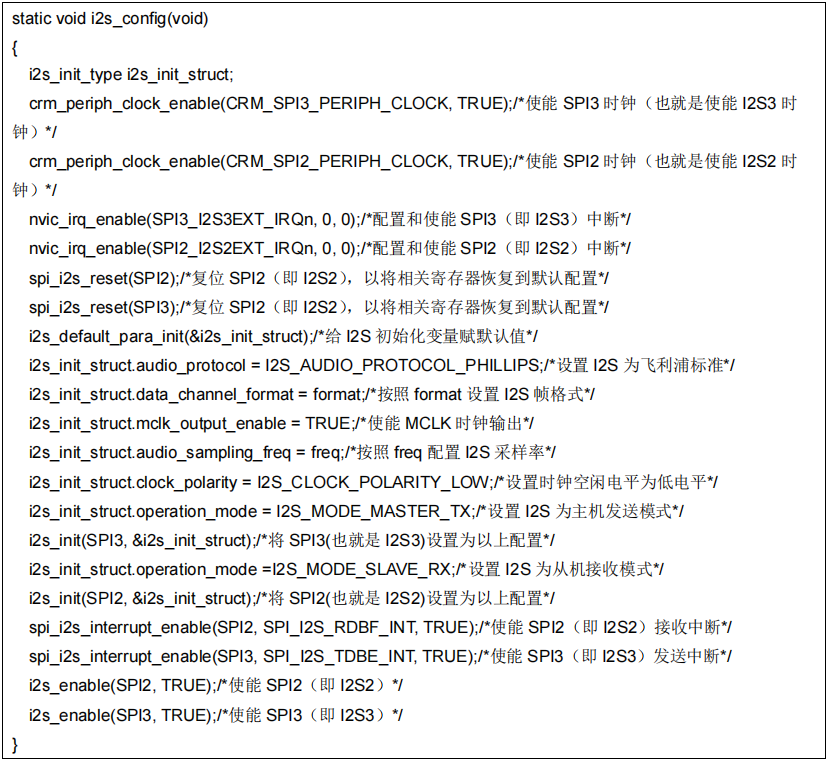
I2S配置及DMA配置函數代碼描述
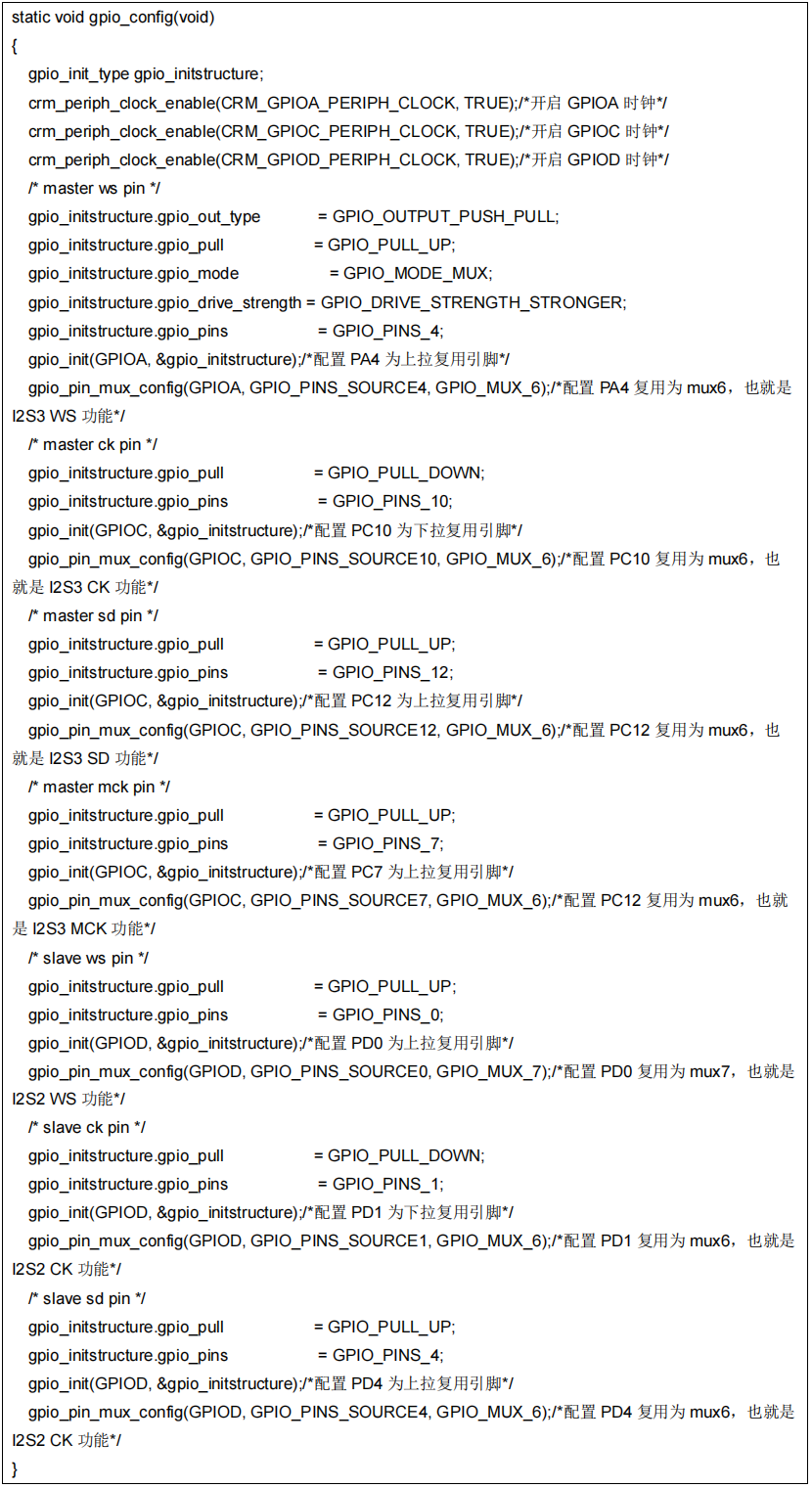
GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明I2S2和I2S3全雙工通信正常。
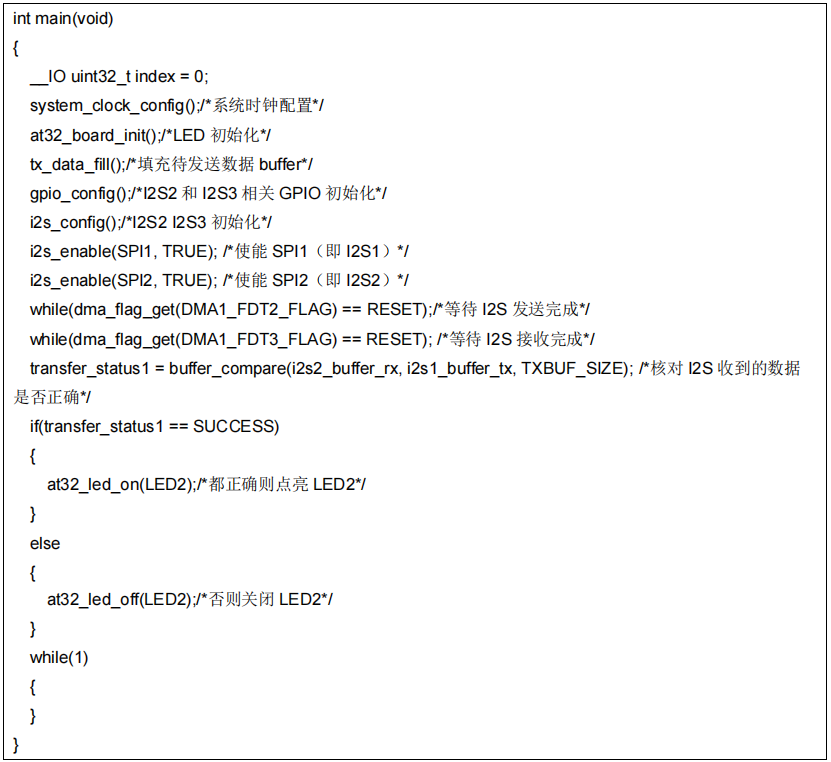
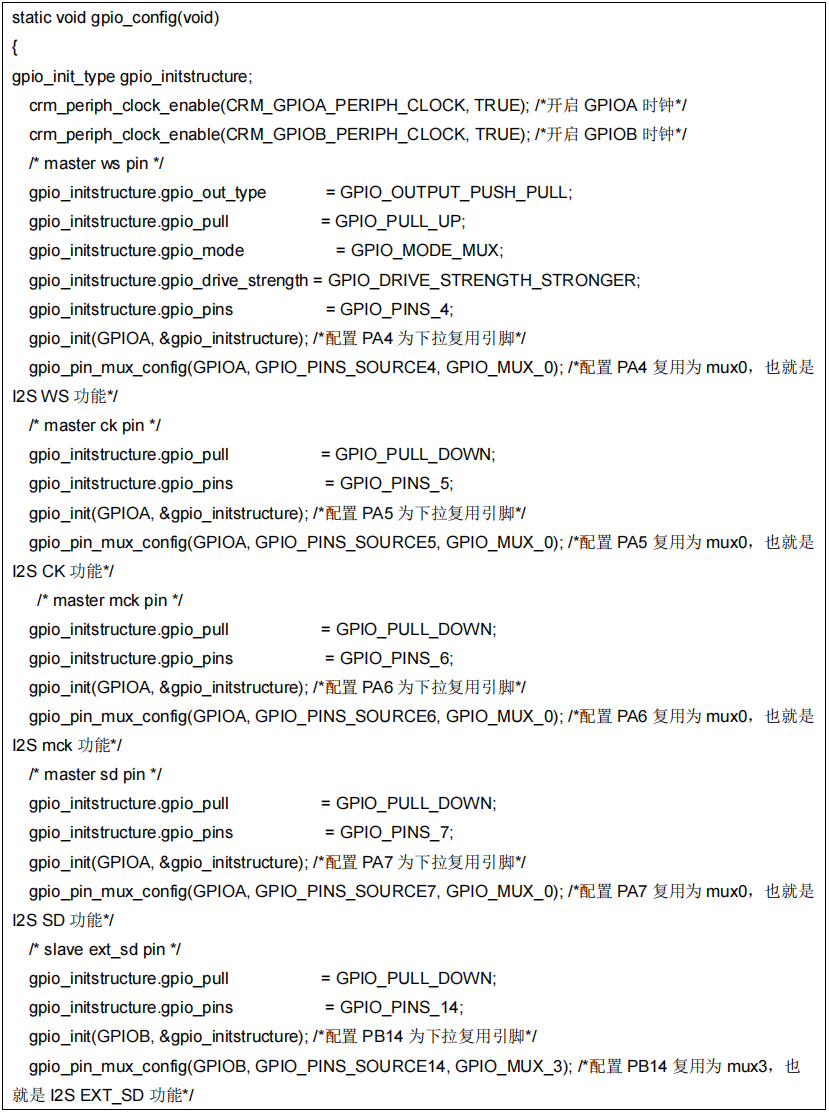
案例4-AT32F425 I2S全雙工DMA方式通信
功能簡介
實現I2S1和I2S2組成一個全雙工I2S,組成的全雙工I2S接口定義如下:
PA4(ws)
PA5(CK)
PA6(MCK)
PA7(SD TX)
PB14(ext_sd 接收)
由于AT32F425只有3個spi(I2S),只能組成一個全雙工I2S,所以不能在同一塊AT-START上用兩個全雙工I2S進行通信。 所以本案例使用一個全雙工I2S進行自收自發通信,接線如下:
PA4(ws)<--->NC
PA5(ck)<--->NC
PA6(MCK)<--->NC
PA7(標清)<--->PB14(ext_sd)
用戶也可以準備兩塊AT-START板子對測。 使用兩塊板子時,需要注意一塊AT-START配置為主機,一塊AT-START配置為從機。 本案例中的代碼僅展示配置為主機,在一塊AT-START上進行自發自收的配置。
資源準備
1)硬件環境:
一塊AT32F425的AT-START BOARD
2)軟件環境:
projectat_start_f425examplesi2sfullduplex_dma
軟件設計
1)配置流程
配置I2S1和I2S2對應的GPIO;
配置I2S1和I2S2的通信配置和DMA配置;
開始DMA通信。
2)代碼介紹
main函數代碼描述
I2S配置及DMA配置函數代碼描述
GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明I2S全雙工通信正常。
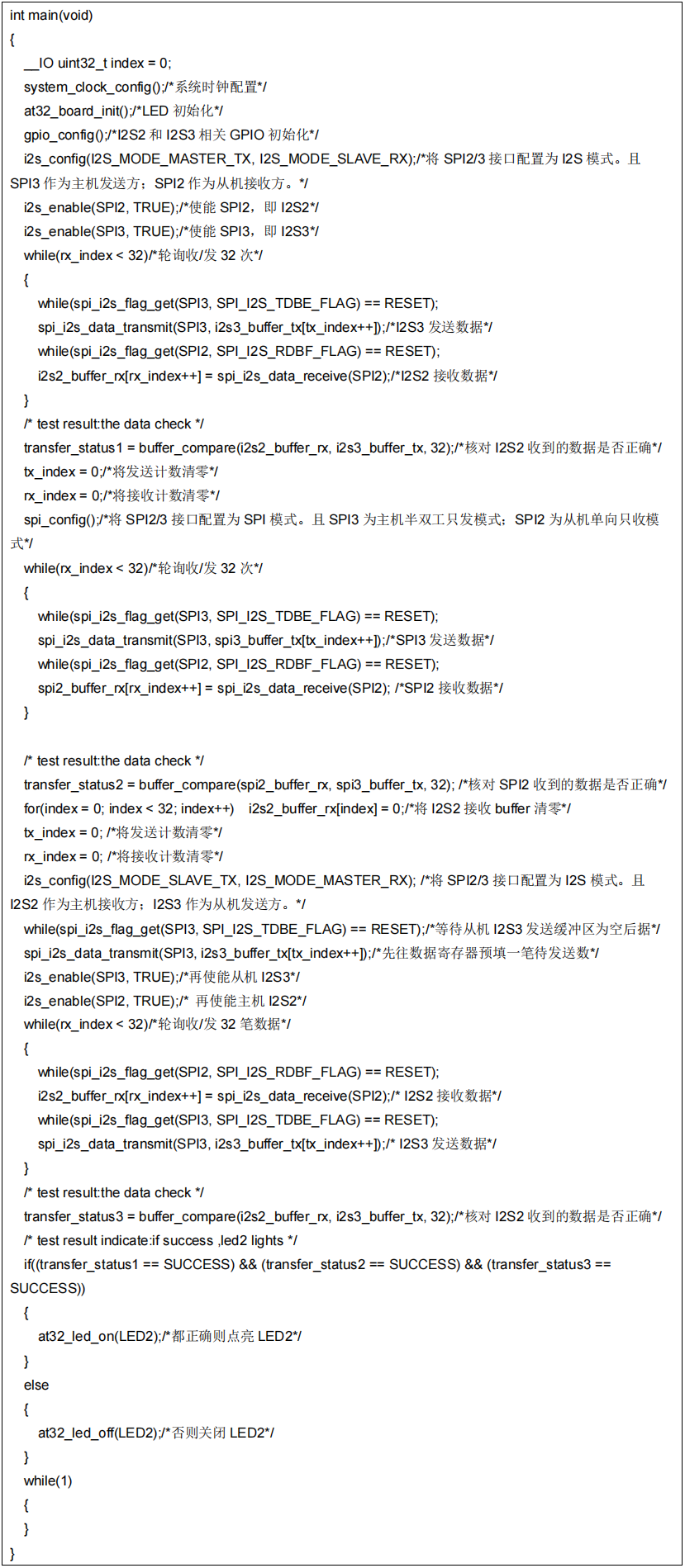
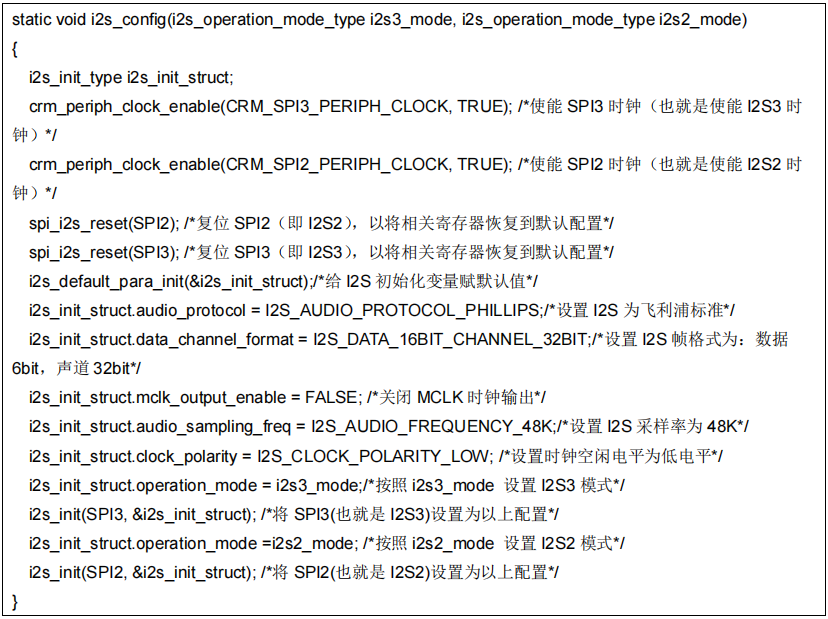
案例5-I2S和SPI功能切換通信
功能簡介
實現SPI2和SPI3之間通信切換到I2S2和I2S3之間通信。 接線如下:
SPI2/I2S2 SPI3/I2S3
PD0(CS/WS)<--->PA15(CS/WS)
PD1(sck/ck)<--->pb3(sck/ck)
PD4(莫西/標清)<--->PB5(莫西/標清)
資源準備
1)硬件環境:
一塊AT32F437的AT-START BOARD
2)軟件環境:
projectat_start_f437examplesi2sspii2s_switch_halfduplex_polling
軟件設計
1)配置流程
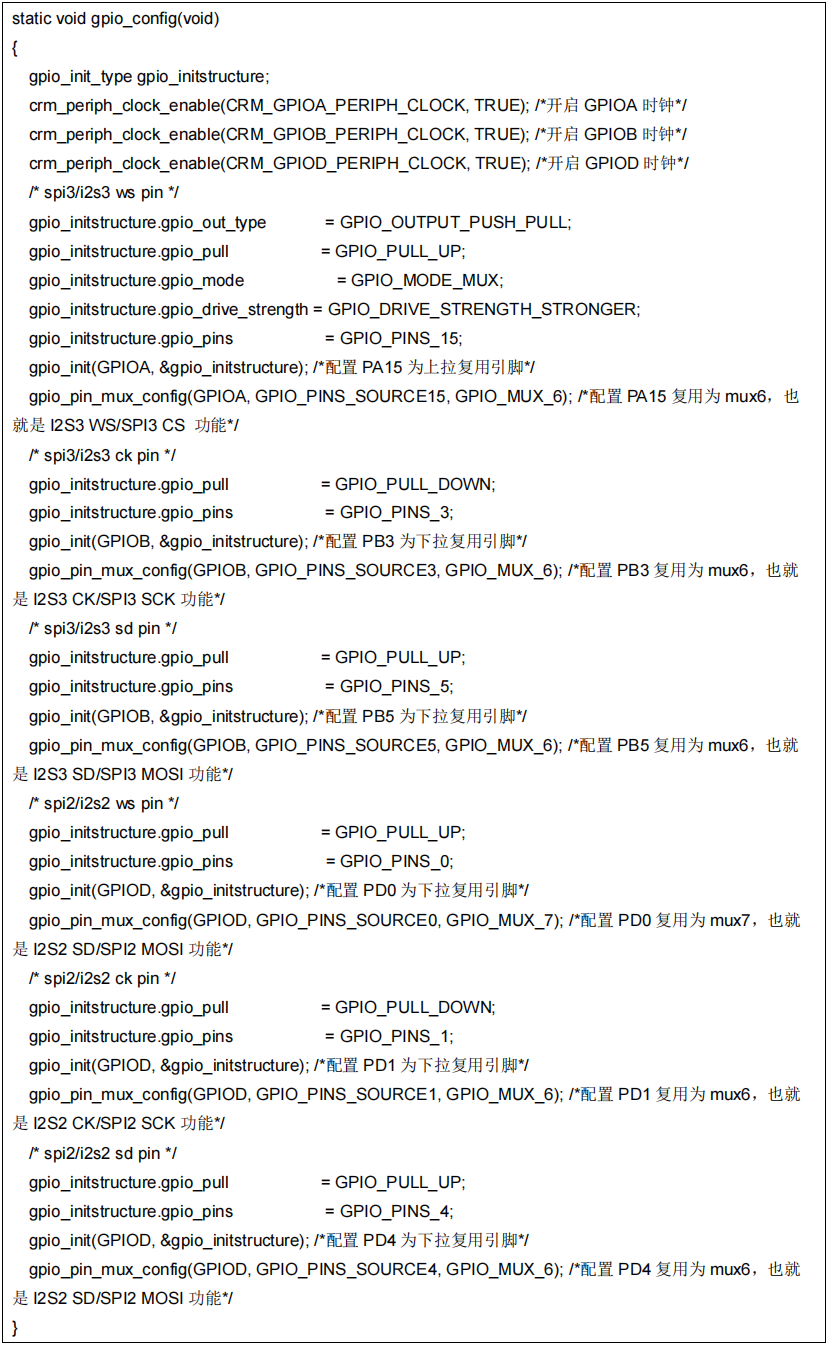
配置SPI2/I2S2和SPI3/I2S3對應的GPIO;
配置I2S2和I2S3的通信配置(主發從收);
開始I2S2和I2S3的輪詢通信,并核對數據;
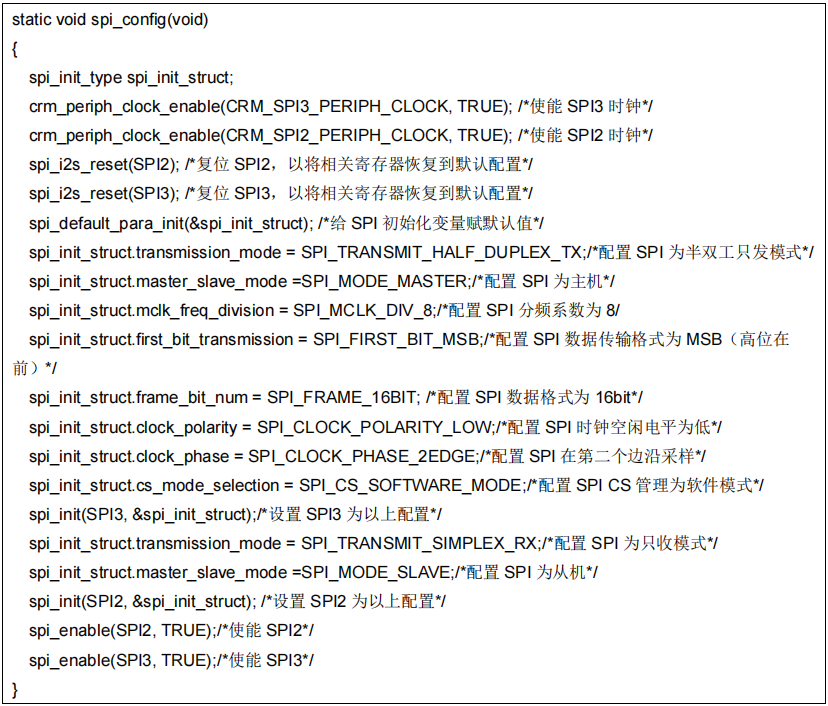
配置SPI2和SPI3的通信配置(SPI3為主機半雙工只發; SPI2為從機單向只收);
開始SPI2和SPI3的輪詢通信,并核對數據;
配置I2S2和I2S3的通信配置(主收從發);
開始I2S2和I2S3的輪詢通信,并核對數據。
2)代碼介紹
main函數代碼描述
I2S配置函數代碼描述
SPI配置函數代碼描述
GPIO配置函數代碼描述
實驗效果
AT-START BOARD的LED2亮起,說明I2S2和I2S3通信正常,SPI2和SPI3也通信正常。
審核編輯:湯梓紅
-
mcu
+關注
關注
146文章
17596瀏覽量
356713 -
接口
+關注
關注
33文章
8838瀏覽量
152760 -
SPI
+關注
關注
17文章
1742瀏覽量
93653 -
I2S
+關注
關注
1文章
66瀏覽量
42449 -
AT32
+關注
關注
1文章
120瀏覽量
2438
原文標題:AT32講堂048 | 雅特力AT32 MCU SPI/I2S入門指南
文章出處:【微信號:AT32 MCU 雅特力科技,微信公眾號:AT32 MCU 雅特力科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AT32 MCU SPI/I2S入門指南
雅特力攜高性能AT32 MCU精彩亮相全球MCU生態發展大會

AT32講堂048 | 雅特力AT32 MCU SPI/I2S入門指南

AT32 MCU SPI/I2S入門指南






 工商網監
工商網監

評論