 運動編程示例:重復運動的循環功能
運動編程示例:重復運動的循環功能
無論產品提供多少功能,如果沒有直觀易用的軟件,這些功能都很難實現。
Oriental Motor 通過提供與多個系列產品兼容的通用 MEXE02 支持軟件,為客戶提供便利。由于每個產品提供不同的功能,因此軟件格式會發生變化以匹配產品。不同產品具有相同的軟件用戶界面可以縮短每個軸的運動序列編程所需的時間。
任何AZ系列產品配合MEXE02軟件使用時,循環功能可用。
有關該軟件的介紹,請閱讀此博客文章或單擊下圖。
< >
循環函數
步進電機最常見的運動序列之一是每次都在精確的距離和方向上重復運動。這在編程術語中通常稱為循環子例程,這意味著循環子例程中包含的任何指令集都將無限期地重復,或者直到滿足條件為止。一旦該循環完成,它就會返回到主程序。
以下摘自 AZ 系列功能手冊。
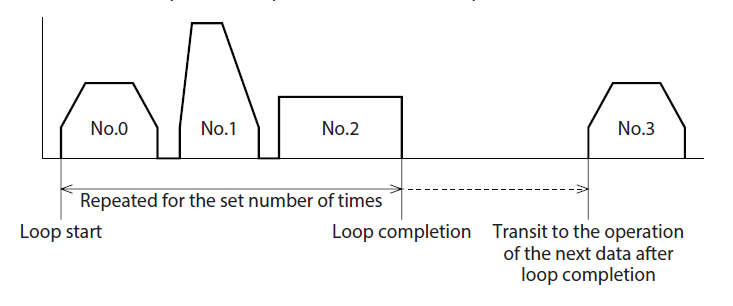
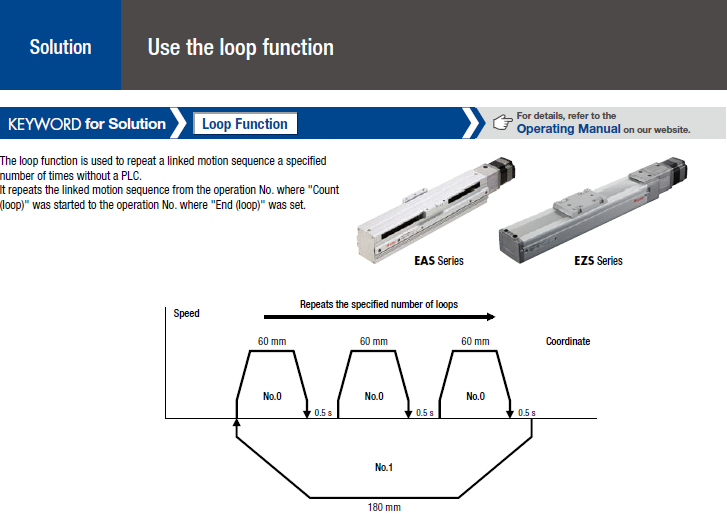
循環功能是將聯動運轉數據編號的運轉重復設定次數的功能。
從設置了“Loop count”的運行數據編號到設置了“Loop end number”的運行數據編號,重復運行“Loop count”中設置的次數。設定次數的動作結束后,轉移到「下一個數據編號」中設定的動作數據編號。
基本上,循環函數按照您設置的次數重復相同的動作。這對于每次都需要相同固定距離的應用非常有用,例如送紙/票據或旋轉分度臺。
應用實例:
對于自動收報機,每次的動作都是相同的,所以讓我們使用另一個需要重復多個動作的例子;就像機器人在有人走過時用手臂和頭跳舞一樣。在此應用程序中,您可以將 AZ 電機用于手臂旋轉關節,將 3 個不同的動作依次鏈接在一起(0 號、1 號、2 號),將它們循環 x 次,然后一旦循環完成,它將移動到下一個數據集(No.3),然后運動序列結束。記得在最后保持那個姿勢。
這就是我們想要做的...
執行 0 號動作
執行一號動作
執行 2 號動作
循環0號、1號、2號動作3次
執行 3 號動作
這就是我們編程的方式......
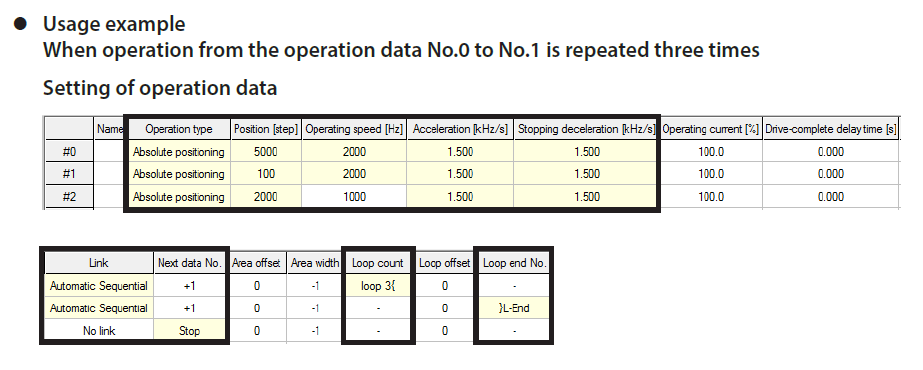
看看下面的使用示例,看看這個運動序列是如何在 MEXE02 軟件上實際編程的。請注意,此運動序列只需要 3 個數據集(#0、#1、#2)。MEXE02 軟件的一個好處是一旦移動被編程和存儲,就不需要再次編程。秘密在第二張圖片中,它顯示了“Next data No.”、“Loop count”和“Loop end No.”。這告訴軟件如何執行數據集 #0、#1 和 #2。
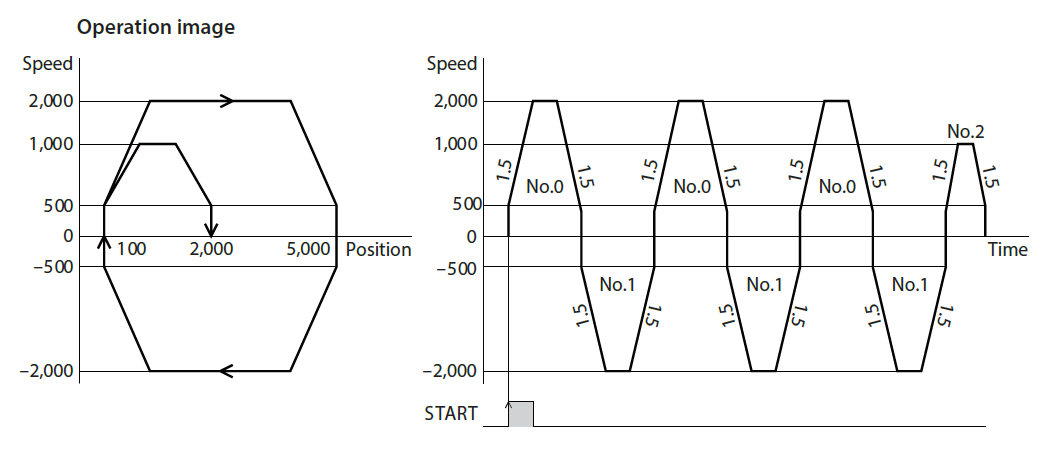
然后……大功告成(記得保存)。這是我們繪制圖表時的運動樣子。
更多駕駛員智能的案例
傳統的步進電機驅動器除了證明功率和邏輯之外,并不是很智能。基本上,它們只是將接收到的任何脈沖命令轉換為電機上的運動。智能實際上是在上位控制器上,就像PLC一樣,可以使用梯形邏輯和脈沖輸出來執行復雜的運動。
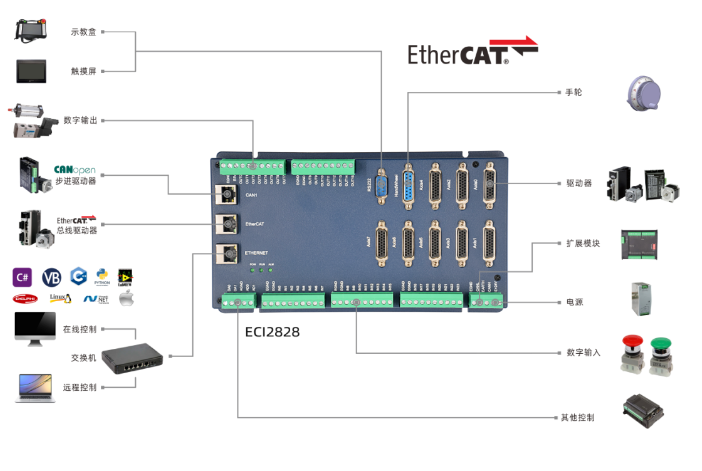
使用 AZ 系列驅動器的優勢在于其先進的運動順序編程,這使得 AZ 系列驅動器在某些情況下無需 PLC 即可運行。提供多種類型的驅動器用于多種用途,例如脈沖輸入、存儲數據和多軸。多達 256 個“動作”可以被編程并存儲在驅動器的非易失性存儲器中。通過使用現場總線通信,例如 Modbus RTU、EtherNet/IP 或 EtherCAT,可以實現更多“動作”。
存儲數據編程的優點
節省空間
設計被簡化
減輕主機控制器的負擔
通過取消 PLC,可以節省更多空間并簡化設計。至少,AZ 系列驅動器應該減輕上位控制器的負擔,這意味著可以使用更便宜的 PLC 或 HMI。由于AZ系列電機內置機械式絕對編碼器,因此也取消了外部編碼器、電池和傳感器。
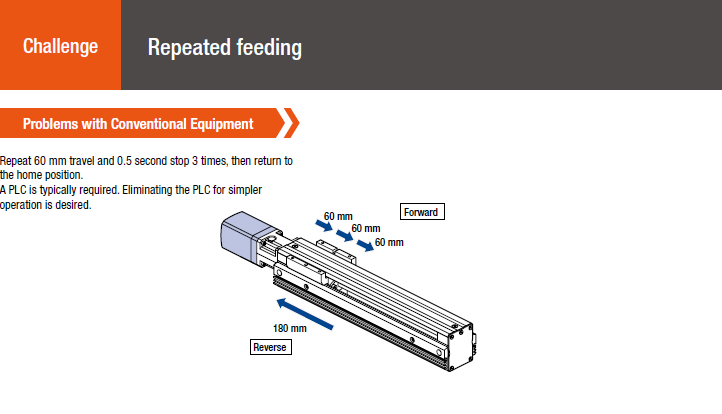
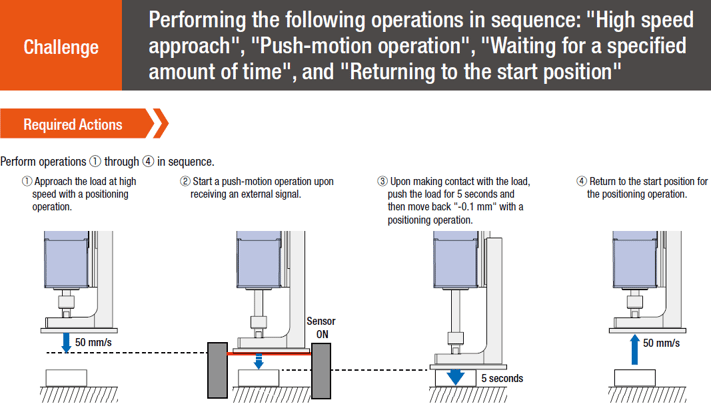
這是另一個帶有線性滑塊的應用示例。
審核編輯黃宇
-
驅動器
+關注
關注
53文章
8261瀏覽量
146659 -
步進電機
+關注
關注
150文章
3114瀏覽量
147625 -
編程
+關注
關注
88文章
3630瀏覽量
93831
發布評論請先 登錄
相關推薦
LabVIEW運動控制&視覺運動
運動控制編程福音
運動控制編程難不難?非常簡單!
運動控制器、運動控制卡、PLC、CNC的關系
?運動控制器的單軸持續運動設置
ZMC運動控制器多任務編程一
基于MELSEC iQ-F FX5運動模塊的功能及編程

入冬別忘運動,運動別忘帶上TA
運動控制器實現高級功能的編程手冊免費下載
PLC小車往返運動編程案例分享
研控運動控制卡的編程小技巧
如何通過Qt編程實現直線插補的運動控制





 工商網監
工商網監
評論