 汽車車載網絡技術論文
汽車車載網絡技術論文
一、方案概述:
隨著電控系統的日益復雜,以及對汽車內部控制功能電控單元相互之間通信能力要求的日益增長采用點對點的鏈接會使得車內線束增多,這樣在考慮內部通訊的可靠性安全性以及重量方面都給汽車設計和制造帶來了很大的困擾。因此為了減少車內連線實現數據的共享和快速交換,同時提高可靠性等方面在快速發展的計算機網絡上,實現CAN、LAN、LIN、MOST等基礎構造的汽車電子網絡系統,即車載網絡。
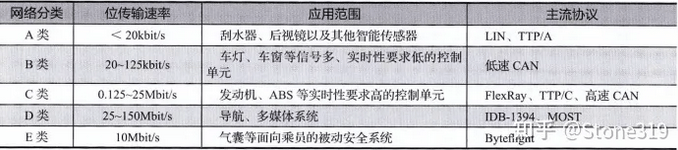
目前各個國家和公司存在多種車載網絡標準。美國汽車工程師學會(SAE)按照汽車上網絡系統的性能,把汽車網絡劃分為不同的等級標準,即A類、B類、C類、D類和E類。
二、發展趨勢:
車載網絡技術的存在是提高汽車的效率這樣復雜的操作簡單化通過高科技控制汽車,提高汽車的安全系數和用戶滿意程度。高科技汽車廠商紛紛研發出了獨立的網絡系統。未來車載網絡技術的發展趨勢仍然是以簡化為主,向著高精尖不斷進步,不斷提高系統的性能。
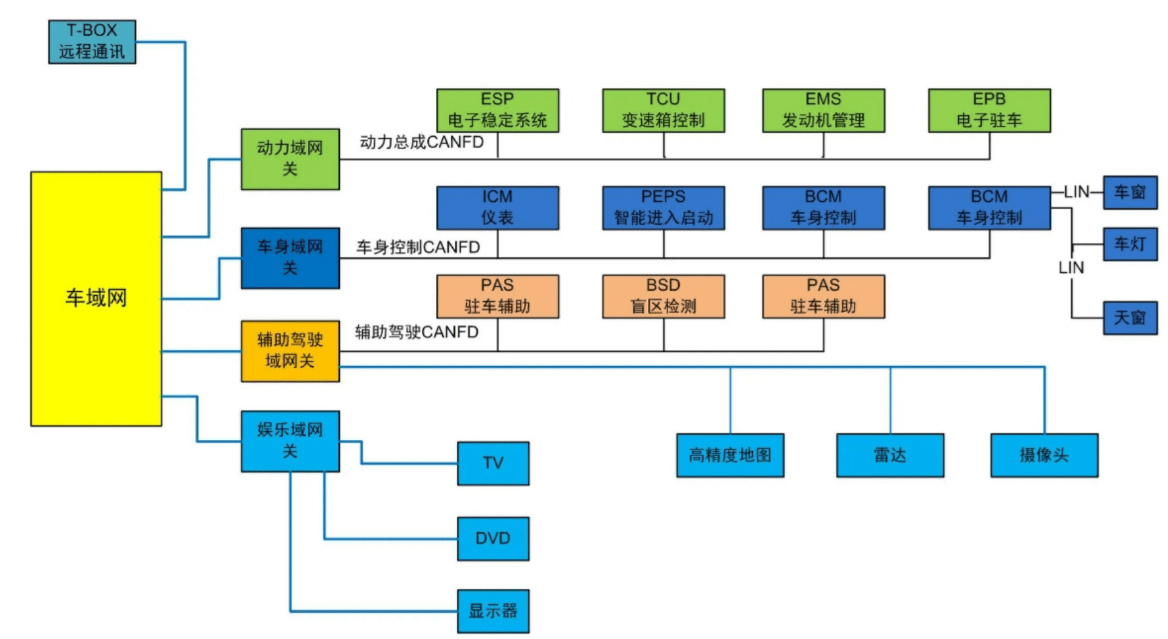
三、結構和原理
(一)CAN(Controller Area Network)控制器局域網
CAN總線是德國BOSCH公司從80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,它是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信速率最高可達1Mbps。
CAN總線特點:1.數據通信沒有主從之分,任意一個節點可以向任何其他(一個或多個)節點發起數據通信,靠各個節點信息優先級先后順序來決定通信次序,高優先級節點信息在134μs通信; 2.多個節點同時發起通信時,優先級低的避讓優先級高的,不會對通信線路造成擁塞;3. 通信距離最遠可達10KM(速率低于5Kbps)速率可達到1Mbps(通信距離小于40M);4. CAN總線傳輸介質可以是雙絞線,同軸電纜。CAN總線適用于大數據量短距離通信或者長距離小數據量,實時性要求比較高,多主多從或者各個節點平等的現場中使用。
(二)LIN(Local Interconnect Network)局域互聯網絡
LIN協會創建于1998年末,最初的發起人為為寶馬、Volvo、奧迪、VW、戴 姆勒-克萊斯勒、摩托羅拉和 VCT等,五家汽車制造商,一家半導體廠商以及一家軟件工具制造商。該協會將主要目的集中在定義一套開放的標準,該標準主要針對車輛中低成本的內部互聯網絡(LIN, local interconnect networks),這些地方無論是帶寬還是復雜性都不必要用到CAN網絡。
LIN標準包括了傳輸協議的定義、傳輸媒質、開發工具間的接口、以及和軟件應用程序間的接口。LIN提升了系統結構的靈活性,并且無論從硬件還是軟件角度而言,都為網絡中的節點提供了相互操作性,并可預見獲得更好的EMC(電磁兼容)特性。
LIN補充了當前的車輛內部多重網絡,并且為實現車內網絡的分級提供了條件,這可以有助于車輛獲得更好的性能并降低成本。LIN協議致力于滿足分布式系統中快速增長的對軟件的復雜性、可實現性、可維護性所提出的要求,它將通過提供一系列高度自動化的工具鏈來滿足這一要求。
(三)MOST(Media Oriented Systems Transport)多媒體定向系統傳輸
面向媒體的系統傳輸(Media Oriented Systems Transport,MOST)是在汽車制造商和供應商中越來越受推崇的一種網絡標準。MOST網絡以光纖為載體,通常是環型拓撲。MOST可提供高達25Mbps的集合帶寬,遠遠高于傳統汽車網絡。也就是說,可以同時播放15個不同的音頻流。因此主要應用在汽車信息娛樂系統。
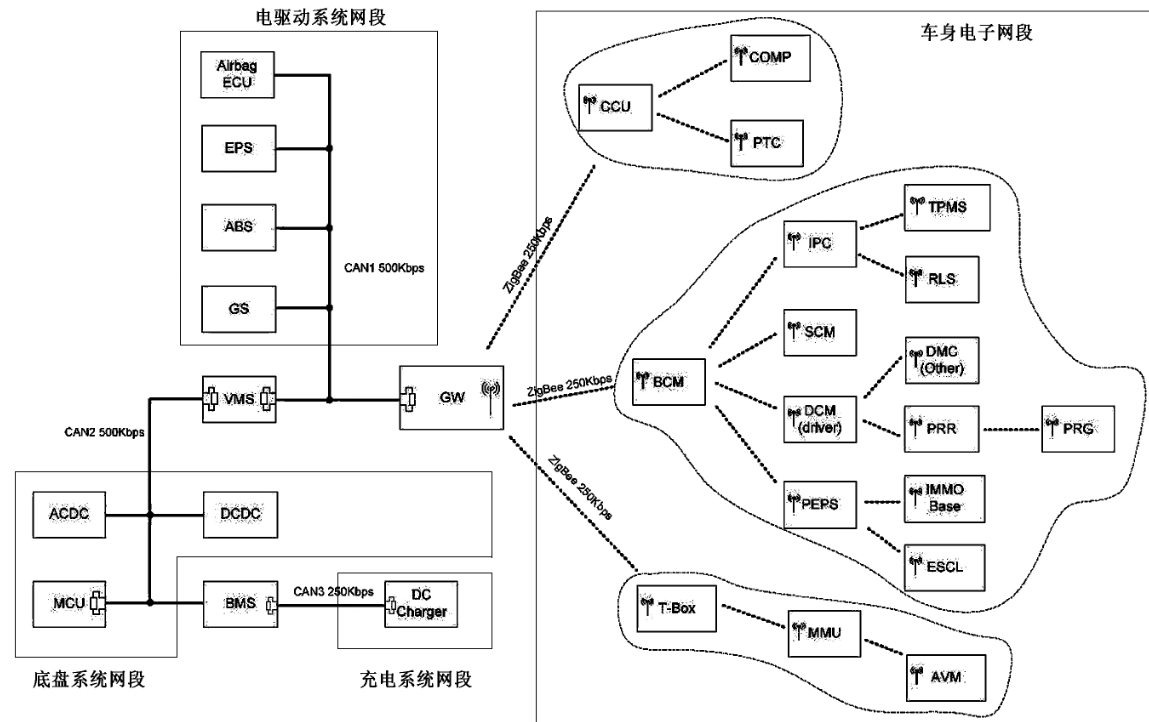
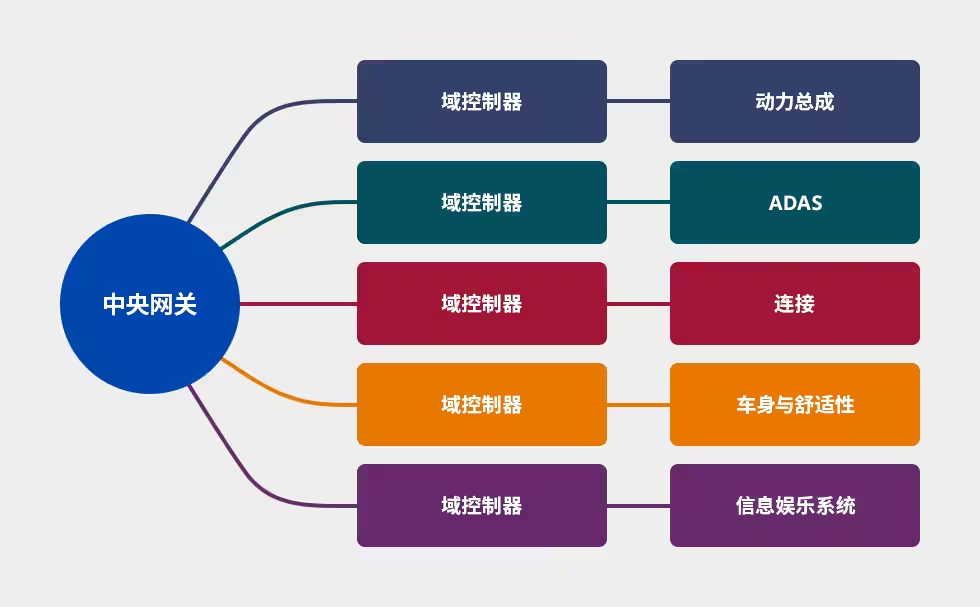
開發車載網絡一般需要仿真開發工具,比如CANOE,PFautoCAN等,車載網絡是個非常復雜的系統,里面同時存在多重通訊網絡。常見的有CAN總線,而即便是CAN總線也會分不同速率的CAN總線,比如,動力系統的發動機控制、變速箱控制等,會采用高速的500K CAN總線控制,舒適系統的,比如,門、燈、窗的控制,會采用低速的125K的CAN總線控制。
三、車載網絡廠牌推薦
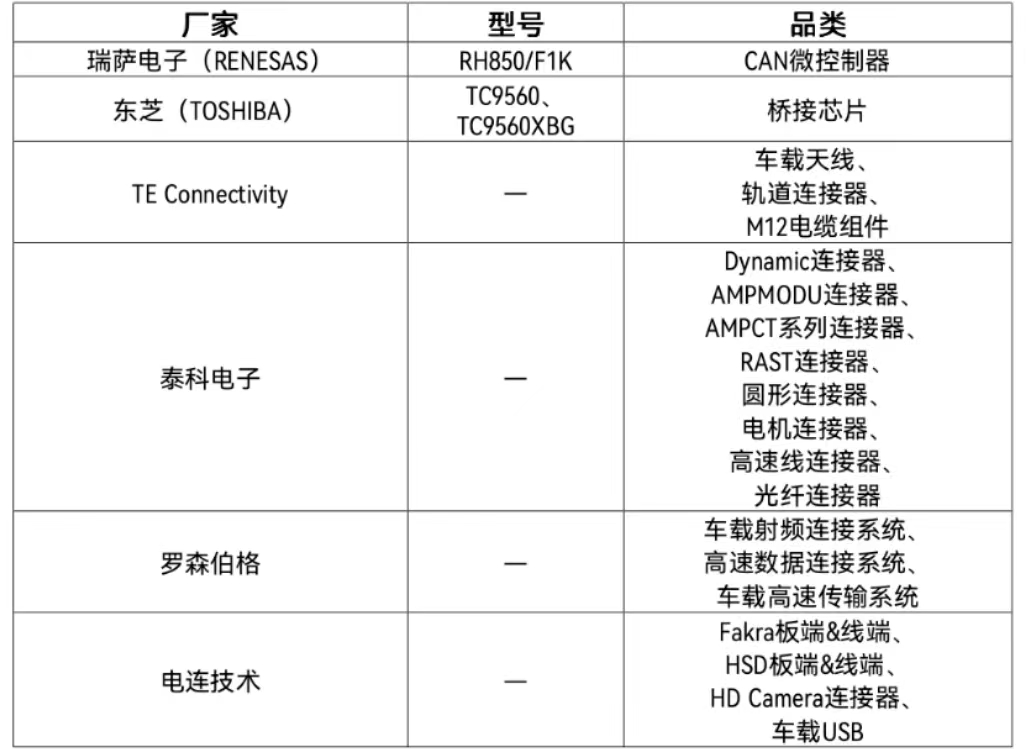
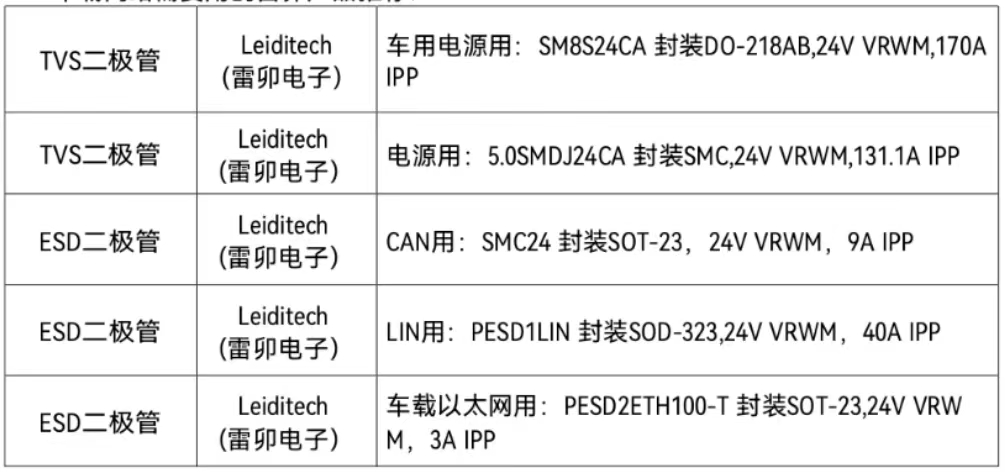
車載網絡需要用的雷卯產品推薦:
審核編輯黃宇
-
車載網絡
+關注
關注
6文章
160瀏覽量
31785 -
汽車
+關注
關注
13文章
3515瀏覽量
37317
發布評論請先 登錄
相關推薦
桌面式車載網絡自動化測試系統TESTBASE-DESKNAT

mesh網絡技術的優缺點
是德科技亮相第三屆車載網絡和通信架構技術及標準研討會
工業主板在礦車車載設備中的應用
車載以太網的優勢和應用
一文讀懂 | 新能源汽車車載電源深度解析
一文讀懂 | 新能源汽車車載OBC
小小噪聲濾波器,應對車載網絡大挑戰

新能源汽車的車載充電機(OBC)內部構造

車載網絡協議與串擾問題

新能源汽車車載充電機(OBC)拓撲結構分析
中國智能汽車車載計算芯片落地場景研究


叉車車載終端定制_基于MT6762安卓核心板的車載終端設備解決方案






 工商網監
工商網監
評論