") PWM開(kāi)關(guān)建模CCM和DCM模式講解
PWM開(kāi)關(guān)建模CCM和DCM模式講解
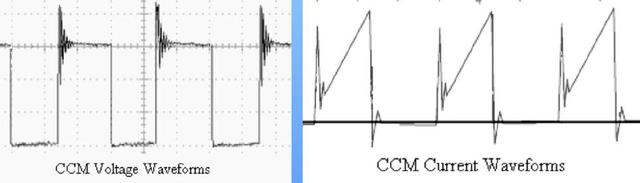
PWM開(kāi)關(guān)建模CCM模式
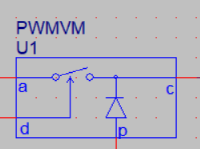
主動(dòng)節(jié)點(diǎn)a,被動(dòng)節(jié)點(diǎn)p,公共節(jié)點(diǎn)c。
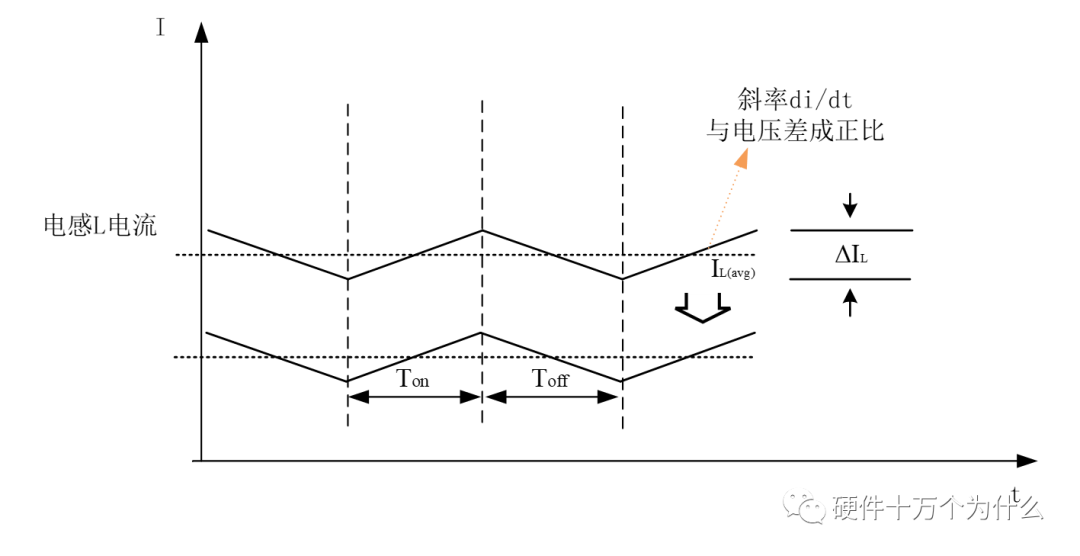
端電流不變:接入電感的公共節(jié)點(diǎn)電流連續(xù)為Ic,而Ia=dIc,Ip=d’Ic。
端電壓關(guān)系:ap兩端電壓始終為直流,而cp兩端電壓為ap的取樣:Vcp=dVap。
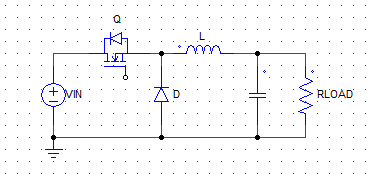
建模結(jié)果可以用直流變壓器仿真,如下
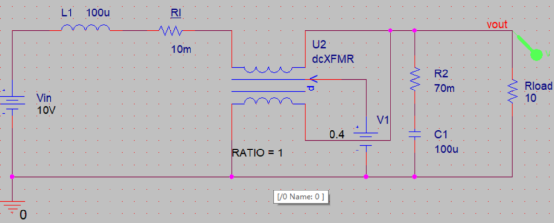
變壓器控制端朝下時(shí),左邊為a,右邊為c,p端是下方兩個(gè)端口相連。 上圖為Boost變換器大信號(hào)仿真,直流增益受電感串聯(lián)的電阻影響的圖形為
從上到下依次為100mΩ至1Ω,電感電阻對(duì)Boost的增益限制還是很大的。
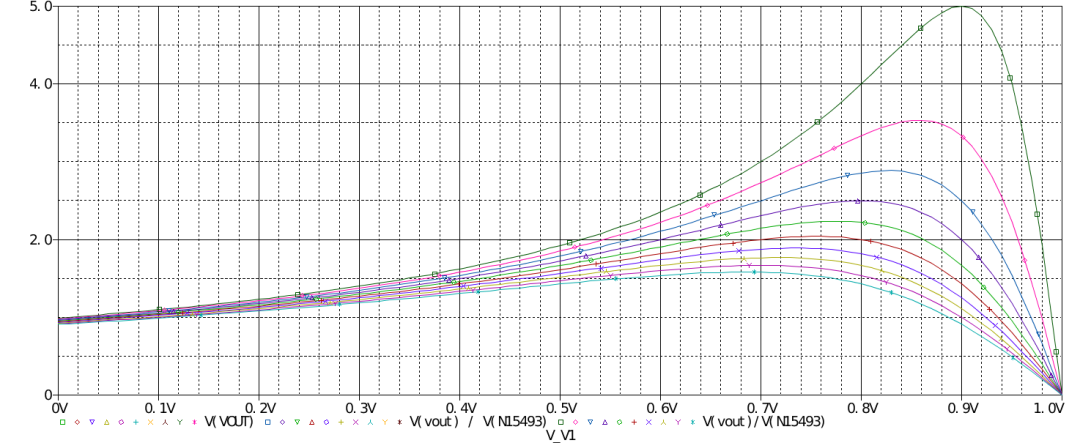
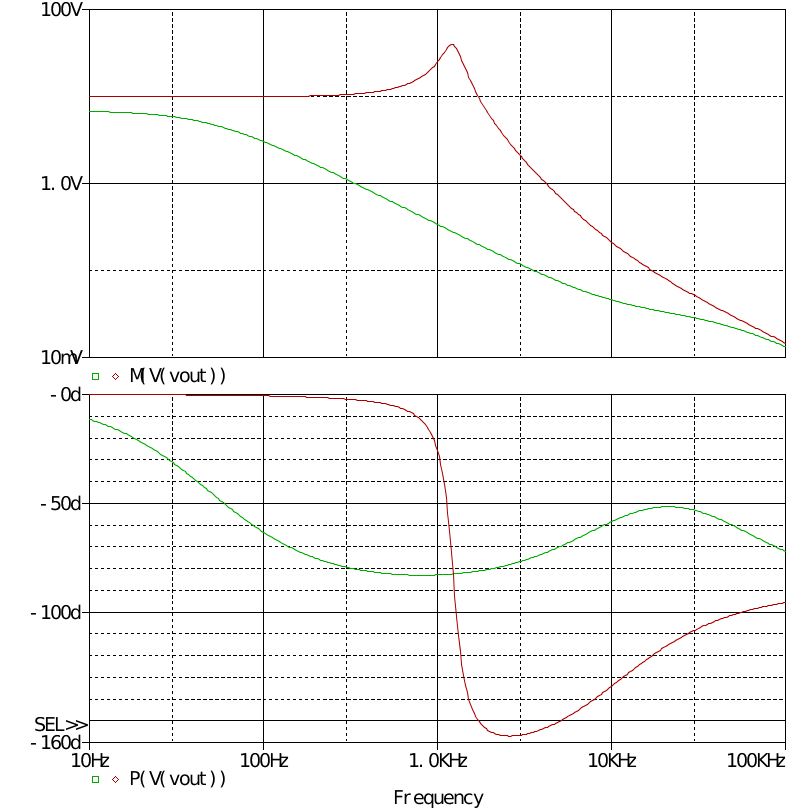
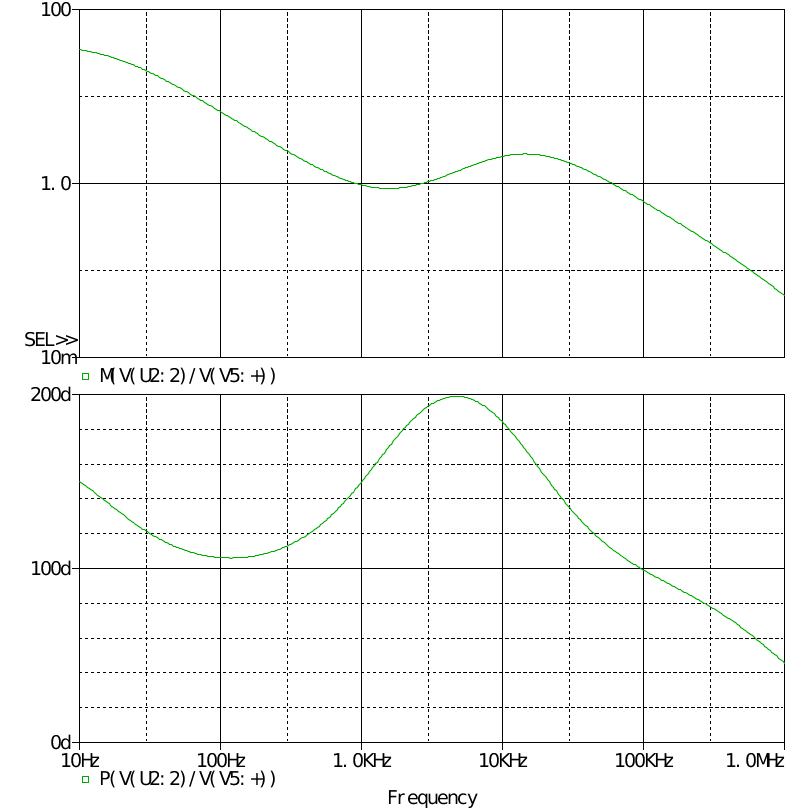
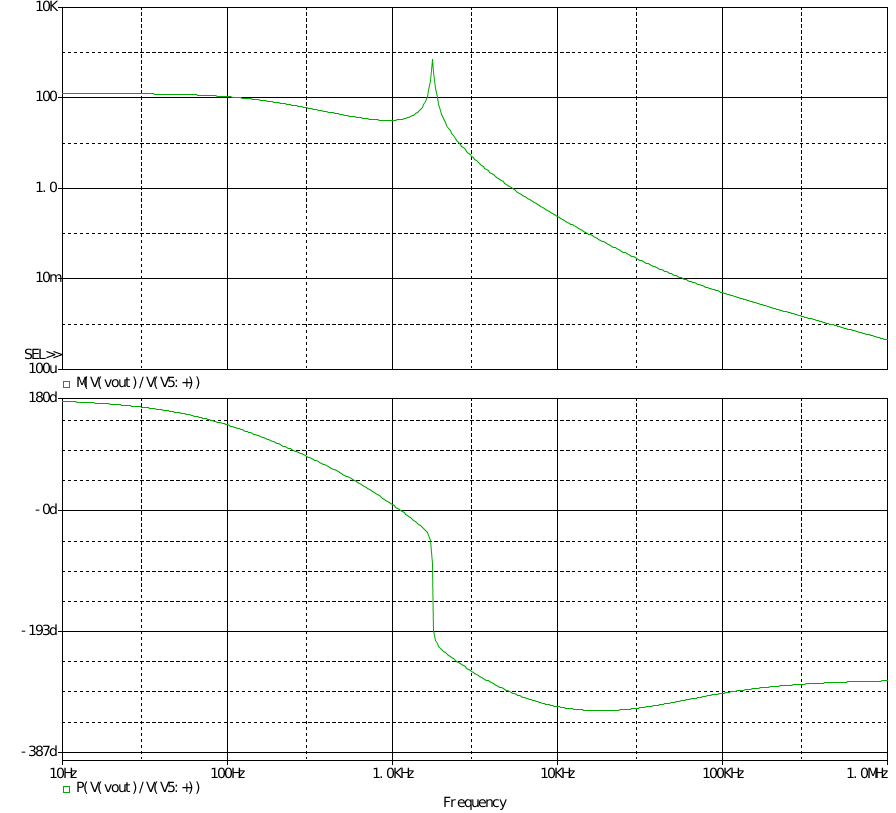
也可以作小信號(hào)仿真,如下
從上到下依次為D的直流量為0.4 0.3 0.2 0.1。 圖中可看出RHPZ的影響,相位裕度為負(fù)幾十度。 最后相位上揚(yáng)的原因是ESR零點(diǎn)。
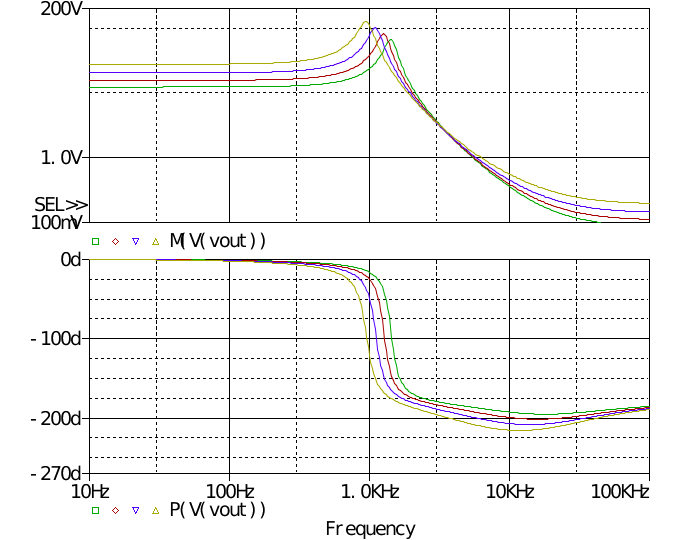
當(dāng)然直接應(yīng)用于帶參數(shù)掃描的小信號(hào)分析,不利于直流工作點(diǎn)的穩(wěn)定,于是改進(jìn)模型,使輸出電壓穩(wěn)態(tài)值穩(wěn)定于常值,即引入直流反饋,其截止頻率極低。 得到電感電阻變化時(shí)的響應(yīng)曲線
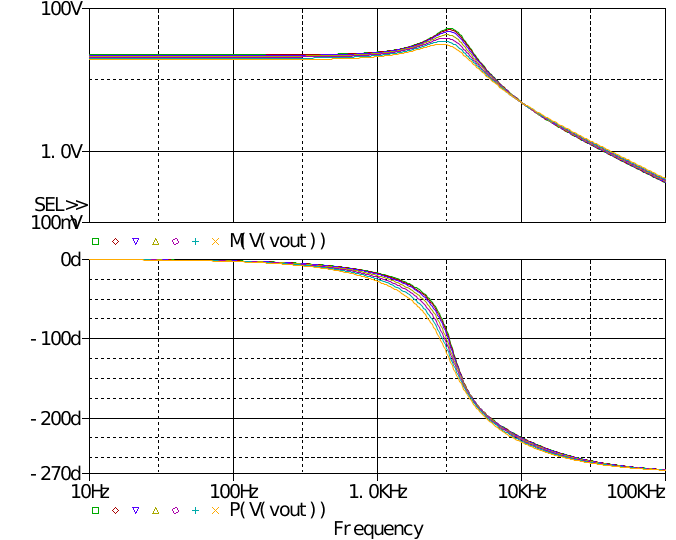
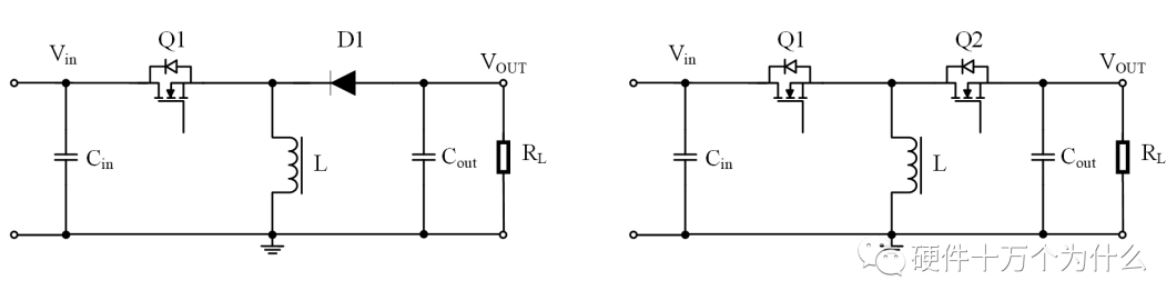
PWM開(kāi)關(guān)建模DCM模式
回到三端開(kāi)關(guān),DCM模式下端電流關(guān)系有一定變化:

,端電壓關(guān)系也變?yōu)椋?/p>
,則變壓器的匝比由d變?yōu)?/p>

。
d~2通過(guò)峰值電流和伏秒積的關(guān)系得到,通過(guò)關(guān)系式的封裝和與CCM之間切換機(jī)制的確定,構(gòu)建了一個(gè)適用于兩種情況下的仿真模型。
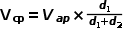
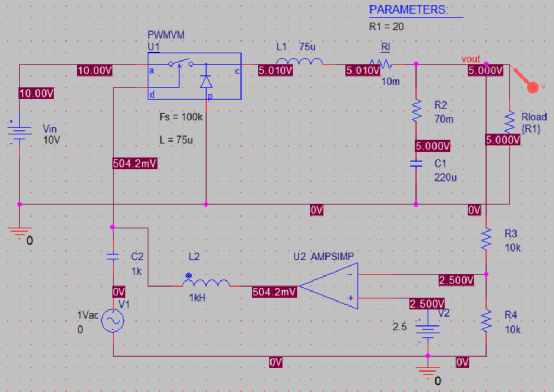
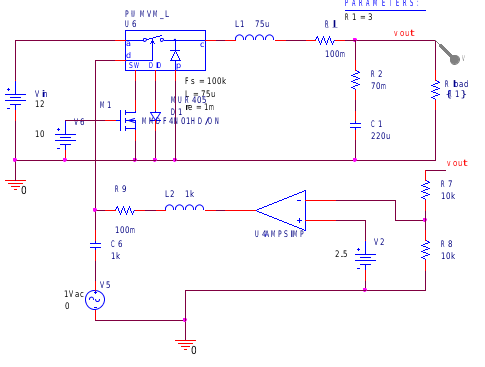
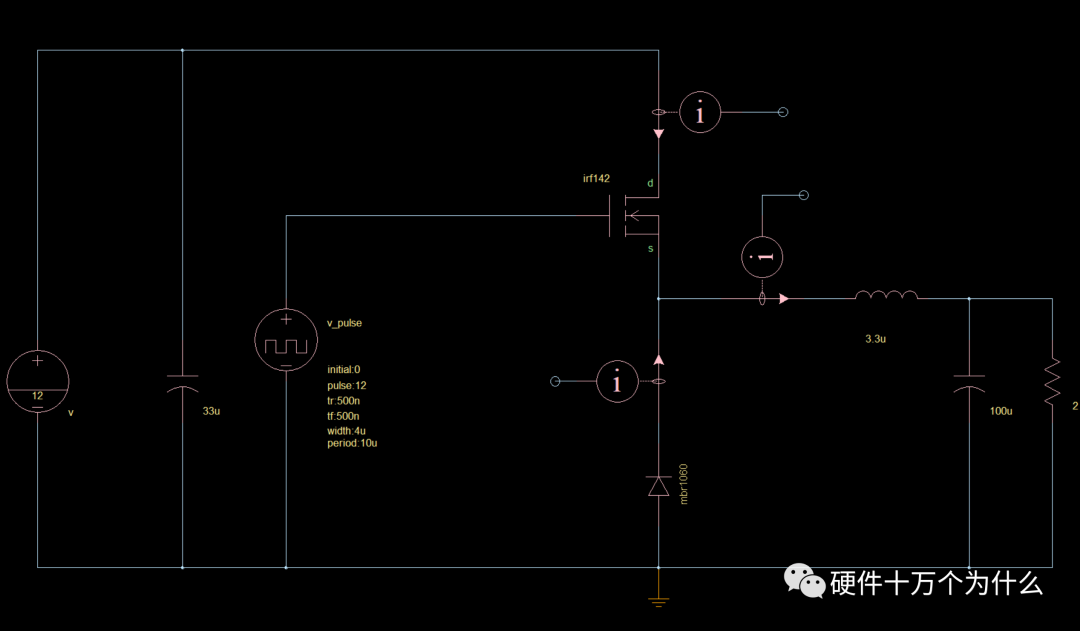
注意,該模型專(zhuān)為Buck使用,需要手動(dòng)輸入開(kāi)關(guān)頻率和外部電感值,以計(jì)算何時(shí)是臨界導(dǎo)通模式,才能在CCM和DCM模式之間切換。
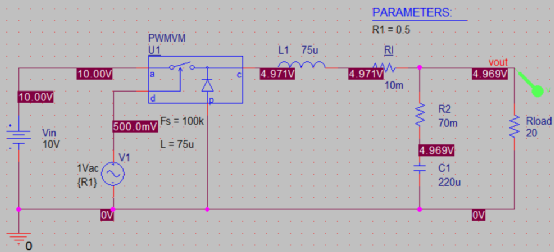
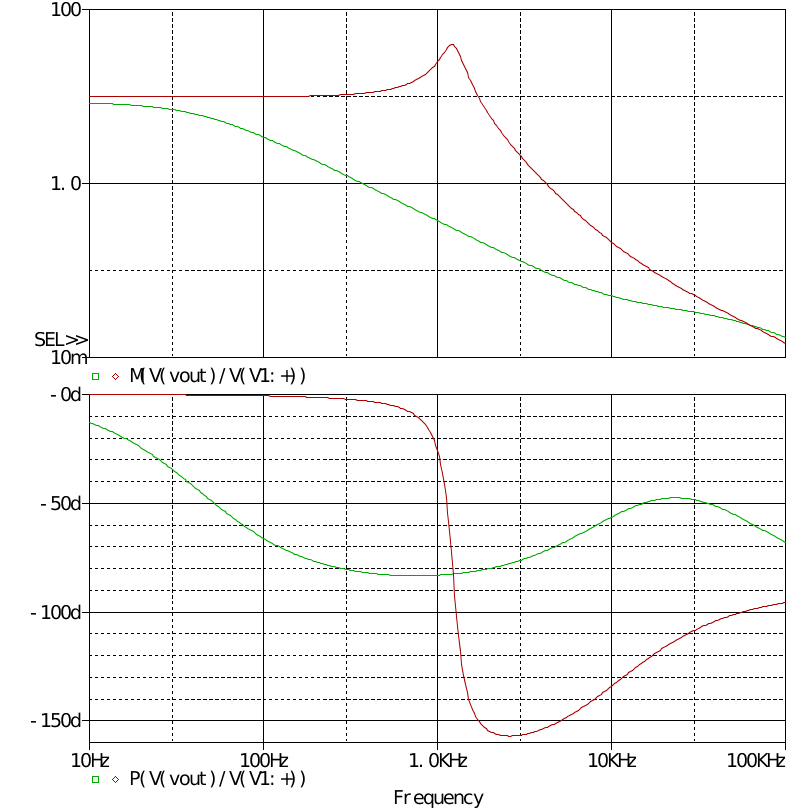
在D=0.5下進(jìn)行交流掃描,如圖電感為75uH和開(kāi)關(guān)頻率為100k,算出臨界電流為0.166A。 分別把Rload設(shè)置為50Ω和5Ω,得到動(dòng)態(tài)響應(yīng)曲線
很明顯,進(jìn)入DCM后由二階系統(tǒng)變?yōu)橐浑A。 電路不帶有電壓反饋,輸出電壓隨負(fù)載的變化較大,因此可以同樣引入直流反饋
同樣作CCM和DCM下的交流分析
PWM調(diào)制器
已經(jīng)知道,小信號(hào)模型中PWM調(diào)制器產(chǎn)生的增益為鋸齒波幅值的倒數(shù)。
可見(jiàn)輸入電壓的變化會(huì)引起模型變化,影響動(dòng)態(tài)響應(yīng)。 若能消除輸入電壓的影響,可以令

通過(guò)引入前饋增益就可以消除輸入電壓的影響。 壓控鋸齒波發(fā)生器的設(shè)計(jì)這里不贅述。 仿真時(shí)也只需在控制電壓后插入一個(gè)增益為V-~P的ABM源就可以。
系統(tǒng)時(shí)域響應(yīng)測(cè)試
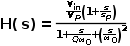
搭建一個(gè)三型補(bǔ)償器,同樣在CCM和DCM模式下分別進(jìn)行測(cè)試,當(dāng)參考電壓從2V階躍至2.5V時(shí),輸出電壓由4V變?yōu)?V的過(guò)程
由于補(bǔ)償器基于CCM模式設(shè)計(jì),因此也無(wú)法說(shuō)明太多問(wèn)題。 可以看到超調(diào)量還是略大的。 對(duì)補(bǔ)償器進(jìn)行交流掃描
可見(jiàn)CCM下設(shè)計(jì)的補(bǔ)償器不適用于DCM模式,在設(shè)計(jì)時(shí)造成一些麻煩。
電流模式控制
CCM下的電流模式控制占空比大于0.5時(shí)需引入斜坡補(bǔ)償。 在推導(dǎo)電流模式控制的仿真模型時(shí),因?yàn)榭刂菩Чc電壓控制模式并無(wú)本質(zhì)區(qū)別,因此PWM開(kāi)關(guān)也可以沿用,即電流電壓關(guān)系為

由斜坡補(bǔ)償?shù)碾姼须娏鞑ㄐ危蟪鯿端的平均電流

。
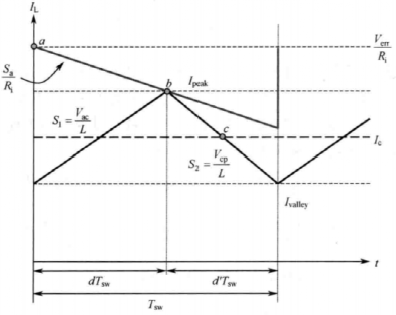

若對(duì)該表達(dá)式引入時(shí)變并求以端口電壓為變量的偏導(dǎo)數(shù),得到一個(gè)小信號(hào)模型,復(fù)雜就略去了。 經(jīng)過(guò)推導(dǎo),發(fā)現(xiàn)模型中存在一個(gè)等效的諧振電容,會(huì)與電感一起產(chǎn)生諧振以至于產(chǎn)生振蕩,這或許就是次諧波振蕩的來(lái)源。 計(jì)算品質(zhì)因數(shù)與補(bǔ)償斜率的關(guān)系后,推導(dǎo)出令品質(zhì)因數(shù)為1以下時(shí)的補(bǔ)償斜率

D~0表示穩(wěn)態(tài)占空比。 這是選擇補(bǔ)償斜率的方法之一。 或者簡(jiǎn)單地選擇為截止時(shí)斜率的一半,前提是電路不進(jìn)入BCM模式。
DCM時(shí)仍需要斜坡補(bǔ)償(原因沒(méi)說(shuō)),因?yàn)槎嗔艘粋€(gè)0電流模態(tài),可得c端電流平均值

而對(duì)有斜坡補(bǔ)償?shù)碾娏鞣逯禐?/p>
可以得到

和電流平均值的表達(dá)式

當(dāng)d2=1-d1時(shí)就變成CCM模式。 通過(guò)以上式子可以得到d2等參數(shù),從而構(gòu)建一個(gè)CCM和DCM通用的仿真模型,形式上與電壓模式控制并無(wú)差異。
注意的是,庫(kù)中的PWMCM包含諧振電容,而PWMCMX為了避免瞬態(tài)仿真中的收斂問(wèn)題,去掉了諧振電容,瞬態(tài)仿真時(shí)可以用這個(gè)模型。
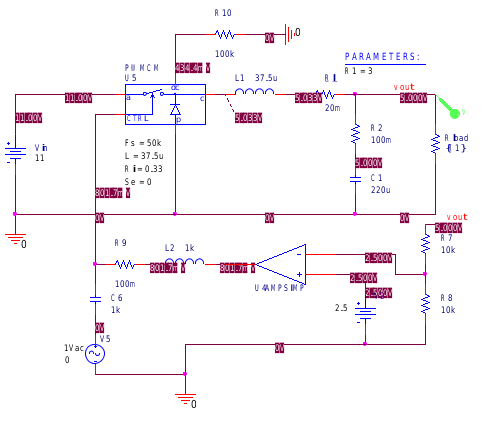
與之前一致作直流閉環(huán)下的小信號(hào)仿真,先設(shè)置S ~a=0,即沒(méi)有斜坡補(bǔ)償?shù)碾娏髂J娇刂疲玫讲ㄌ貓D
可見(jiàn)未補(bǔ)償時(shí)在高頻處存在一個(gè)諧振峰,在此例中這個(gè)諧振峰穿越了0dB線,將會(huì)影響性能,與理論預(yù)測(cè)的一致。
再進(jìn)行斜坡補(bǔ)償,如前所述選擇補(bǔ)償斜率,這里電路運(yùn)行于CCM模式,假定不會(huì)進(jìn)入BCM,可以直接取為截止斜率(也可以是導(dǎo)通斜率)的一半為

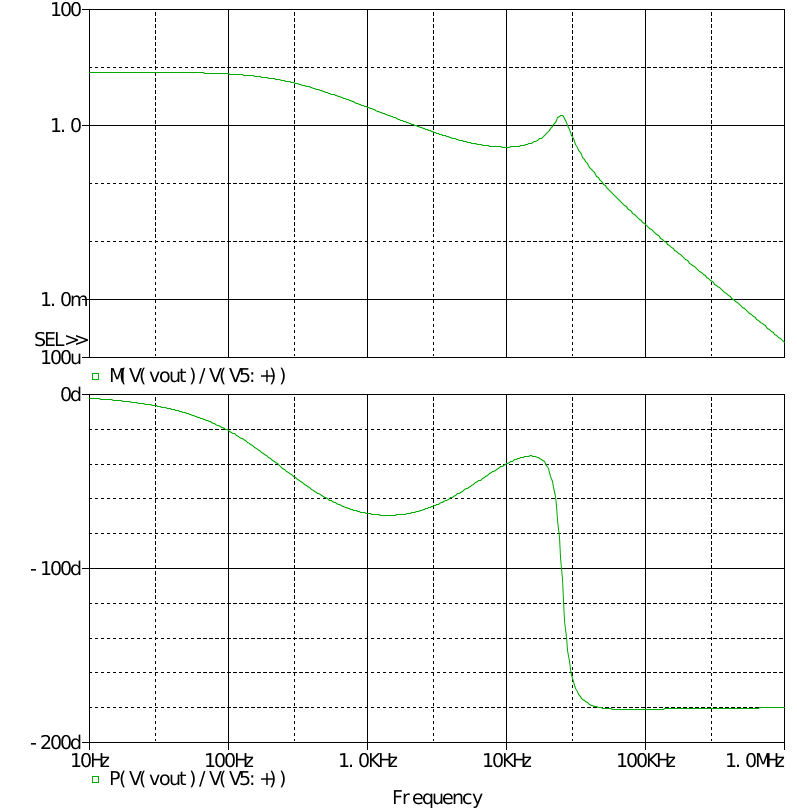
其中0.33是電流取樣電阻的阻值。 若取導(dǎo)通斜率的一半則為26.4kV/s。 補(bǔ)償后的波特圖為
則消除了諧振峰,穩(wěn)定性改善了許多。
占空比信號(hào)直接生成
一般將電壓模式控制稱(chēng)為直接占空比控制,將電流模式控制稱(chēng)為間接占空比控制,因?yàn)殡娏髂J娇刂浦卸嗔艘粋€(gè)誤差電壓轉(zhuǎn)化為峰值電流的環(huán)節(jié)。 通過(guò)直接推導(dǎo)占空比的表達(dá)式然后構(gòu)建模型,理論上可以實(shí)現(xiàn),但CCM下的模型似乎并不能預(yù)測(cè)到高頻的諧振點(diǎn)。 DCM下的模型運(yùn)行良好。
考慮寄生參數(shù)
紋波電流在輸入電容和輸出電容存在的ESR上形成紋波電壓,導(dǎo)致PWM開(kāi)關(guān)模型的

和

并非恒定值,而是疊加了一個(gè)紋波。 如果把寄生參數(shù)考慮進(jìn)PWM開(kāi)關(guān)中,可以直接構(gòu)建一個(gè)

,隨拓?fù)涞淖兓兓?由端電壓關(guān)系有

即在p端加入一個(gè)阻值為

的電阻。
再考慮MOS管導(dǎo)通電阻和二極管導(dǎo)通壓降的影響。 流經(jīng)MOS和二極管的電流不變,而且在PWM開(kāi)關(guān)中已經(jīng)定義好了分別是a端和p端,那么最終變化的也是電壓波形。

后兩項(xiàng)可以用兩個(gè)電壓源實(shí)現(xiàn),但開(kāi)關(guān)SW和二極管的具體壓降由流經(jīng)的電流和選擇的器件參數(shù)決定,這時(shí)就需要外接實(shí)際的管子,然后PWM開(kāi)關(guān)模型再通過(guò)管子上的實(shí)際壓降來(lái)計(jì)算得出模型參數(shù)。
注意的是外接MOS管和二極管的實(shí)質(zhì)是測(cè)量其上的導(dǎo)通電壓,而不是讓它們參與變換器的工作,因此MOS管直接用一個(gè)直流電源維持導(dǎo)通,二極管也直接陰極接地,維持導(dǎo)通。
電流模式下的模型也如上所述。
這些損耗模型因?yàn)槭抢秒娏髌骄瞪蓳p耗電壓值,而實(shí)際中損耗能量是與電流有效值有關(guān),其差別有時(shí)不可忽略,所以精確性并非最佳。
邊界導(dǎo)通模式的PWM模型
頻率變化的BCM具有特別的優(yōu)點(diǎn):避免反向恢復(fù)的影響; 電路模型退化成一階; 易于實(shí)現(xiàn)軟開(kāi)關(guān)。 其控制思想就是讓電感電流到0時(shí)就打開(kāi)開(kāi)關(guān)管。 用于反激拓?fù)渲蟹Q(chēng)為準(zhǔn)諧振拓?fù)洌衾藐P(guān)斷振鈴插入延遲,則可以實(shí)現(xiàn)軟開(kāi)關(guān)。
BCM下,端電流恰為峰值的一半
模型以導(dǎo)通時(shí)間

為輸入?yún)?shù)。
四階變換器Cuk電路例子
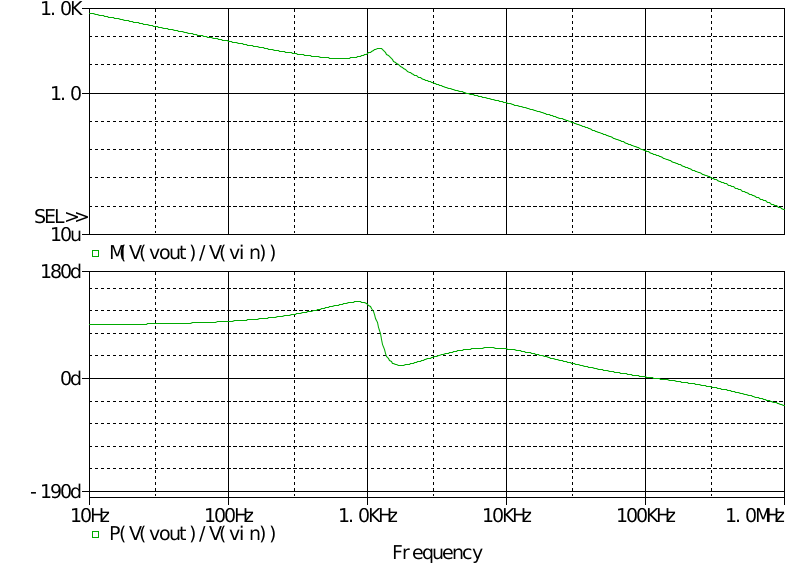
同樣用書(shū)中給出的PWM開(kāi)關(guān)模型可以構(gòu)建其他拓?fù)洌珻uk電路及其交流響應(yīng)如下
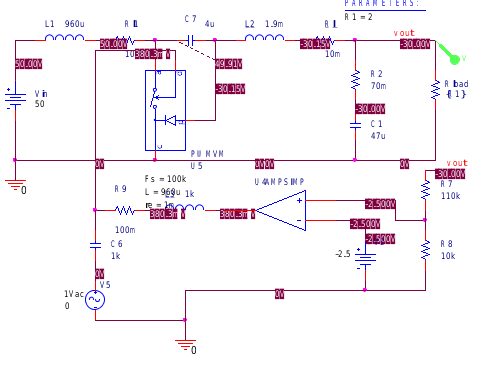
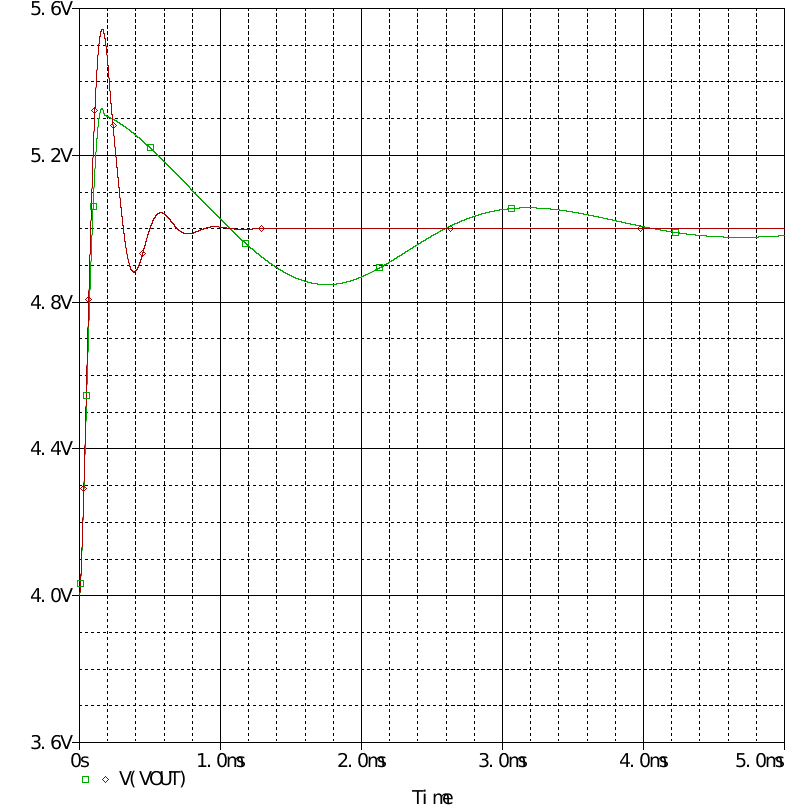
明顯可以看出相移達(dá)到-320°,確是四階系統(tǒng),后面因ESR零點(diǎn)略有上升。 在截止頻率處相移為-290°,相位裕度為-110°,極易振蕩。 以下是在占空比輸入階躍信號(hào)時(shí)的輸出響應(yīng)。
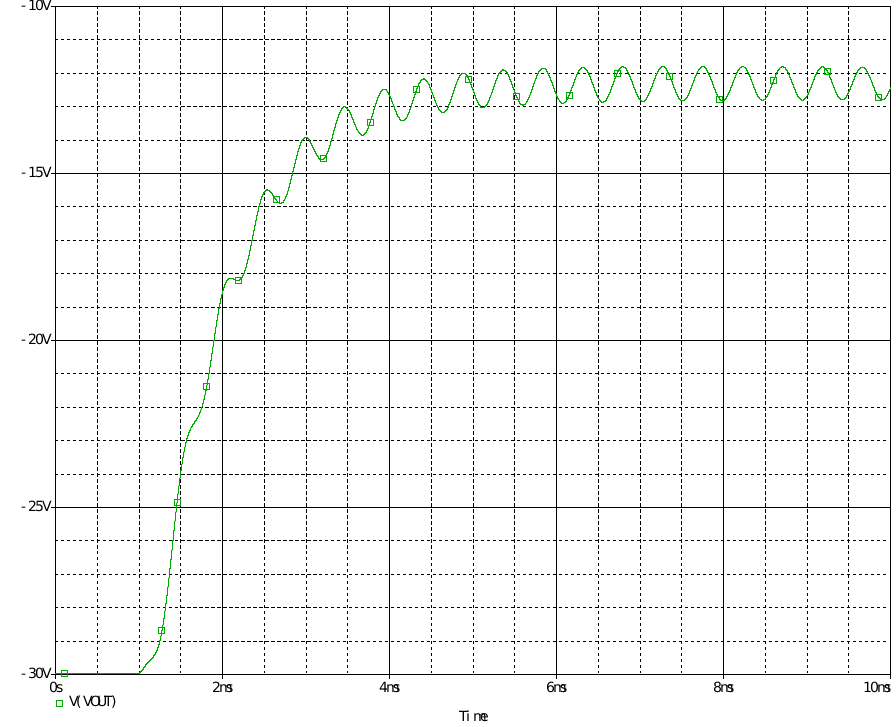
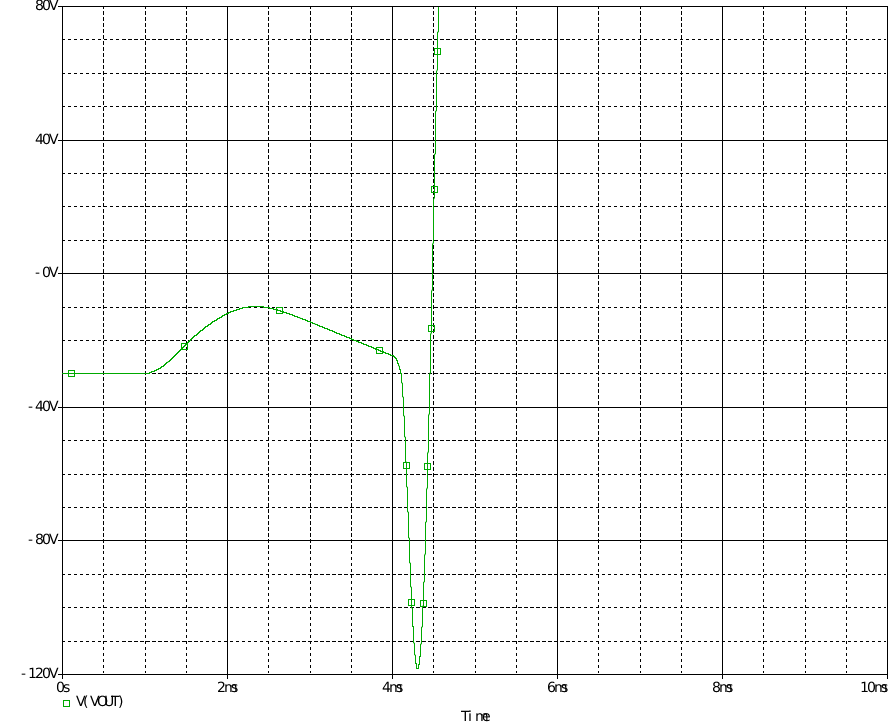
而下圖是把閉環(huán)的參考電壓換成階躍電壓源,得出發(fā)散振蕩的結(jié)果
-
開(kāi)關(guān)
+關(guān)注
關(guān)注
19文章
3142瀏覽量
93766 -
PWM
+關(guān)注
關(guān)注
114文章
5195瀏覽量
214357 -
電壓
+關(guān)注
關(guān)注
45文章
5622瀏覽量
116022 -
DCM
+關(guān)注
關(guān)注
0文章
159瀏覽量
26523 -
CCM
+關(guān)注
關(guān)注
0文章
145瀏覽量
24053
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
什么是CCM和DCM
反激變換器DCM與CCM模式的優(yōu)缺點(diǎn)

開(kāi)關(guān)電源CCM和DCM工作模式
開(kāi)關(guān)電源Buck電路CCM及DCM工作模式
開(kāi)關(guān)電源Buck電路CCM與DCM工作模式有什么區(qū)別?
開(kāi)關(guān)電源Buck電路CCM和DCM工作模式
BUCK電路的CCM和DCM模式
開(kāi)關(guān)電源DCM與CCM模式它們都有哪些優(yōu)缺點(diǎn)?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論