") PID項(xiàng)目實(shí)例詳解
PID項(xiàng)目實(shí)例詳解
一、 PID回路控制概述
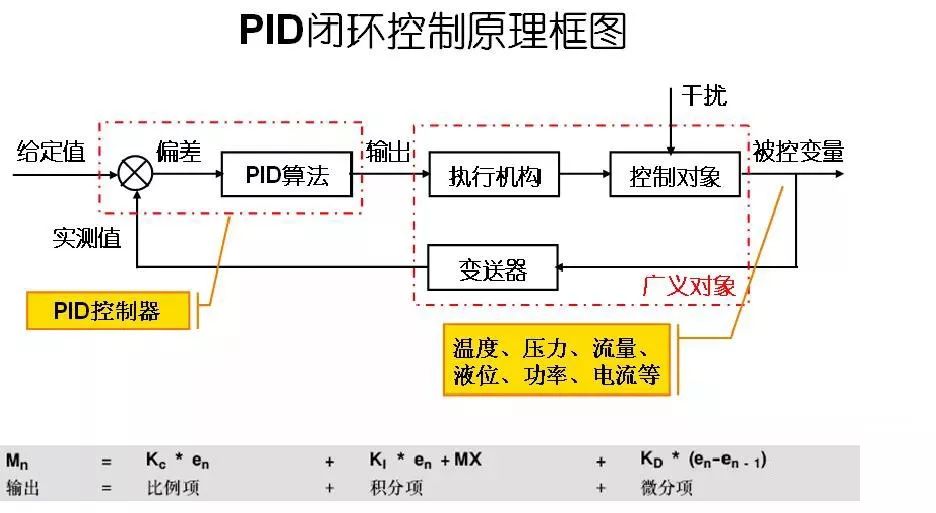
PID控制器是應(yīng)用最廣泛的閉環(huán)控制器,它根據(jù)給定值與被控實(shí)測(cè)值之間的偏差; 按照PID算法計(jì)算出控制器的輸出量,控制執(zhí)行機(jī)構(gòu)進(jìn)行調(diào)節(jié),使被控量跟隨給定量變化,并使系統(tǒng)達(dá)到穩(wěn)定; 自動(dòng)消除各種干擾對(duì)控制過(guò)程的影響。 其中PID分別表示比例、積分和微分。
S7-200 SMART中PID功能實(shí)現(xiàn)方式有以下三種:
PID指令塊:通過(guò)一個(gè)PID回路表交換數(shù)據(jù),只接受0.0 - 1.0之間的實(shí)數(shù)(實(shí)際上就是百分比)作為反饋、給定與控制輸出的有效數(shù)值。
PID向?qū)?/strong>:方便地完成輸入/輸出信號(hào)轉(zhuǎn)換/標(biāo)準(zhǔn)化處理。 PID指令同時(shí)會(huì)被自動(dòng)調(diào)用。
根據(jù)PID算法自己編程
S7-200 SMART CPU最多可以支持8個(gè)PID控制回路(8個(gè)PID指令功能塊),根據(jù)PID算法自己編程沒(méi)有具體數(shù)目的限制,但是我們需要考慮PLC的存儲(chǔ)空間以及掃描周期等影響。
PID控制是負(fù)反饋閉環(huán)控制,能夠抑制系統(tǒng)閉環(huán)內(nèi)的各種因素所引起的擾動(dòng),使反饋跟隨給定變化。
PID控制算法有幾個(gè)關(guān)鍵的參數(shù)Kc(Gain,增益)Ti(積分時(shí)間常數(shù)),Td(微分時(shí)間常數(shù))Ts(采樣時(shí)間)
在S7-200 SMART中PID功能是通過(guò)PID指令功能塊實(shí)現(xiàn)。 通過(guò)定時(shí)(按照采樣時(shí)間)執(zhí)行PID功能塊,按照PID運(yùn)算規(guī)律,根據(jù)當(dāng)時(shí)的給定、反饋、比例-積分-微分?jǐn)?shù)據(jù),計(jì)算出控制量。
由于PID可以控制溫度、壓力等等許多對(duì)象,它們各自都是由工程量表示,因此有一種通用的數(shù)據(jù)表示方法才能被PID功能塊識(shí)別。
S7-200 SMART中的PID功能使用占調(diào)節(jié)范圍的百分比的方法抽象地表示被控對(duì)象的數(shù)值大小。 在實(shí)際工程中,這個(gè)調(diào)節(jié)范圍往往被認(rèn)為與被控對(duì)象(反饋)的測(cè)量范圍(量程)一致。
PID功能塊只接受0.0 - 1.0之間的實(shí)數(shù)(實(shí)際上是0%--100%)作為反饋、給定與控制輸出的有效數(shù)值,如果是直接使用PID功能塊編程,必須保證數(shù)據(jù)在這個(gè)范圍之內(nèi),否則會(huì)出錯(cuò)。 其他如增益、采樣時(shí)間、積分時(shí)間、微分時(shí)間都是實(shí)數(shù)。 因此,必須把外圍實(shí)際的物理量與PID功能塊需要的(或者輸出的)數(shù)據(jù)之間進(jìn)行轉(zhuǎn)換。 這就是所謂輸入/輸出的轉(zhuǎn)換與標(biāo)準(zhǔn)化處理
二、PID主要參數(shù)
采樣時(shí)間:CPU必須按照一定的時(shí)間間隔對(duì)反饋進(jìn)行采樣,才能進(jìn)行PID控制的計(jì)算。 采樣時(shí)間就是對(duì)反饋進(jìn)行采樣的間隔。 短于采樣時(shí)間間隔的信號(hào)變化是不能測(cè)量到的。 過(guò)短的采樣時(shí)間沒(méi)有必要,過(guò)長(zhǎng)的采樣間隔顯然不能滿足擾動(dòng)變化比較快、或者速度響應(yīng)要求高的場(chǎng)合。
增益(Gain,放大系數(shù),比例常數(shù))
增益與偏差(給定與反饋的差值)的乘積作為控制器輸出中的比例部分。 提高響應(yīng)速度,減少誤差,但不能消除穩(wěn)態(tài)誤差,當(dāng)比例作用過(guò)大時(shí),系統(tǒng)的穩(wěn)定性下降。
積分時(shí)間:偏差值恒定時(shí),積分時(shí)間決定了控制器輸出的變化速率。 積分時(shí)間越短,偏差得到的修正越快。 過(guò)短的積分時(shí)間有可能造成不穩(wěn)定。
積分時(shí)間的長(zhǎng)度相當(dāng)于在階躍給定下,增益為“1”的時(shí)候,輸出的變化量與偏差值相等所需要的時(shí)間,也就是輸出變化到二倍于初始階躍偏差的時(shí)間。
如果將積分時(shí)間設(shè)為最大值,則相當(dāng)于沒(méi)有積分作用。
微分時(shí)間:偏差值發(fā)生改變時(shí),微分作用將增加一個(gè)尖峰到輸出中,隨著時(shí)間流逝減小。 微分時(shí)間越長(zhǎng),輸出的變化越大。 微分使控制對(duì)擾動(dòng)的敏感度增加,也就是偏差的變化率越大,微分控制作用越強(qiáng)。 微分相當(dāng)于對(duì)反饋?zhàn)兓厔?shì)的預(yù)測(cè)性調(diào)整。
如果將微分時(shí)間設(shè)置為0就不起作用,控制器將作為PI調(diào)節(jié)器工作。
比例調(diào)節(jié) :提高響應(yīng)速度,減少誤差,但不能消除穩(wěn)態(tài)誤差,當(dāng)比例作用過(guò)大時(shí),系統(tǒng)的穩(wěn)定性下降。 (由小到大單獨(dú)調(diào)節(jié))
積分調(diào)節(jié):消除穩(wěn)態(tài)誤差,使系統(tǒng)的動(dòng)態(tài)響應(yīng)變慢,積分時(shí)間越小,積分作用越大 ,偏差得到的修正越快,過(guò)短的積分時(shí)間有可能造成不穩(wěn)定。 (將調(diào)好的比例增益調(diào)整到50%~80%后,由大到小減小積分時(shí)間)
微分調(diào)節(jié):超前調(diào)節(jié),能預(yù)測(cè)誤差變化的趨勢(shì),提前抑制誤差的控制作用,從而避免了被控量的嚴(yán)重超調(diào)。 可以改善系統(tǒng)的響應(yīng)速度和穩(wěn)定性,對(duì)噪聲干擾有放大作用,對(duì)具有滯后性質(zhì)的被控對(duì)象,應(yīng)加入微分環(huán)節(jié)。
三、PID向?qū)?/strong>
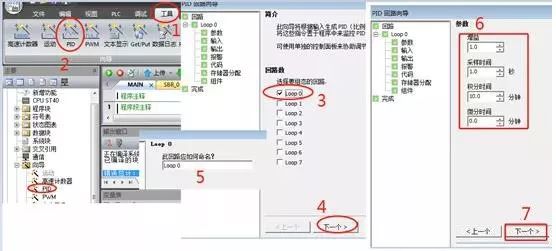
1、在Micro/WIN SMART中的工具菜單中選擇PID向?qū)?/p>
3、S7-200 SMART CPU最多可以支持8個(gè)PID控制回路(8個(gè)PID指令功能塊)
6、增益:即比例常數(shù)
積分時(shí)間:如果不想要積分作用可以將該值設(shè)置很大(比如10000.0)
微分時(shí)間:如果不想要微分回路,可以把微分時(shí)間設(shè)為0
采樣時(shí)間:是PID控制回路對(duì)反饋采樣和重新計(jì)算輸出值的時(shí)間間隔
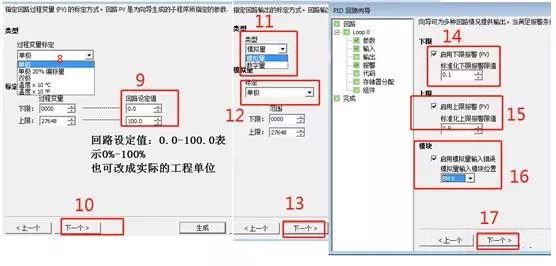
8、單極性:0-27648
雙極性-27648到27648
溫度x10°是PT100的熱電阻或熱電偶 的溫度值 °C表示攝氏度 °F表示華氏度
選用20%偏移:如果輸入為4-20mA則選此項(xiàng),4mA是0-20mA信號(hào)的20%,所以選20% 偏移,即4mA對(duì)應(yīng)5530,20mA對(duì)應(yīng)27648
11、輸出類型:可以選擇模擬量輸出或數(shù)字量輸出。
模擬量輸出用來(lái)控制一些需要模擬量給定的設(shè)備,如比例閥、變頻器等
數(shù)字量輸出實(shí)際上是控制輸出點(diǎn)的通、斷狀態(tài)按照一定的占空比變化,可以控制固態(tài)繼電器(加熱棒等)
12、范圍:
為單極時(shí),缺省值為 0 到 27648
為雙極時(shí),取值-27648 到27648
為20%偏移量時(shí),取值5530 - 27648 ,不可改變
14、反饋值下限的10%時(shí)報(bào)警
15、反饋值高于上限的90%時(shí)報(bào)警
16、模擬量模塊錯(cuò)誤報(bào)警 。 “EM0”就是第一個(gè)擴(kuò)展模塊的位置

18、可以選擇添加PID 手動(dòng)控制模式
20、PID功能塊使用了一個(gè)120個(gè)字節(jié)的V區(qū)地址來(lái)進(jìn)行控制回路的運(yùn)算工作; 并且PID向?qū)傻妮斎?輸出量的標(biāo)準(zhǔn)化程序也需要運(yùn)算數(shù)據(jù)存儲(chǔ)區(qū)。 要保證該地址起始的若干字節(jié)在程序的其它地方?jīng)]有被重復(fù)使用。
24、向?qū)瓿缮傻淖映绦?/p>
25、向?qū)傻臄?shù)據(jù)塊
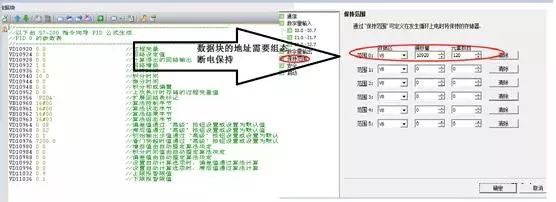
數(shù)據(jù)塊的地址需要組態(tài)斷電保持
四、PID指令
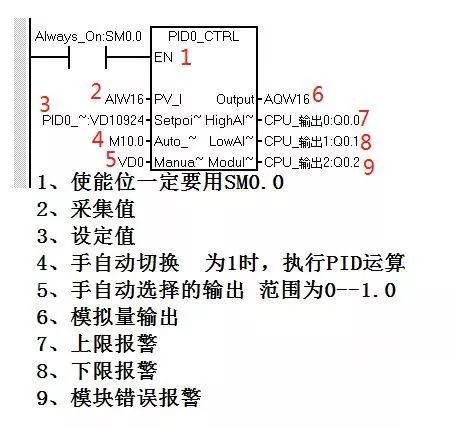
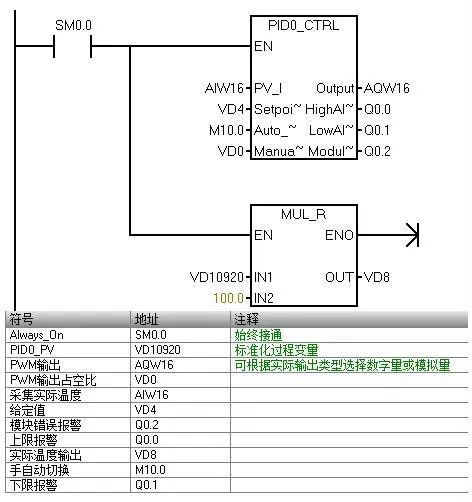
五、程序編寫
利用PID向?qū)Ь帉懗绦颉⑹箿囟缺3衷诮o定值,并對(duì)PID參數(shù)進(jìn)行整定
六、下載并調(diào)試
下載操作在這不做闡述
1、調(diào)試說(shuō)明:
(1) 比例增益:提高調(diào)節(jié)速度,減小誤差,但不能消除穩(wěn)態(tài)誤差;
參考方法可由小到大單獨(dú)調(diào)節(jié)
(2)積分作用:消除穩(wěn)態(tài)誤差,使系統(tǒng)的動(dòng)態(tài)相應(yīng)的變慢,積分過(guò)大會(huì)影響系統(tǒng)的穩(wěn)定性。 調(diào)節(jié)參考方法:將調(diào)節(jié)好的比例系數(shù)調(diào)整到50%--80%; 由大到小,增加積分影響
(3)微分作用:超前控制,減少調(diào)節(jié)時(shí)間,對(duì)干擾有放大作用
調(diào)節(jié)方法參考:由小到大單獨(dú)調(diào)節(jié),并相應(yīng)調(diào)整比例和積分,追求調(diào)節(jié)偏差的變化率
(4)PID調(diào)節(jié)方法:先將積分和微分關(guān)閉,先調(diào)比例,在比例差不多時(shí)加上積分,一般情況,比例值越大輸出結(jié)果越快; 積分越大,輸出結(jié)果越慢; 微分在調(diào)節(jié)溫控時(shí)使用,一般情況可不用
2、可通過(guò)狀態(tài)圖表監(jiān)控并修改給定值、手自動(dòng)狀態(tài)、PWM輸出設(shè)置等。
但也可通過(guò)PID控制面板進(jìn)行調(diào)試,如下圖所示:
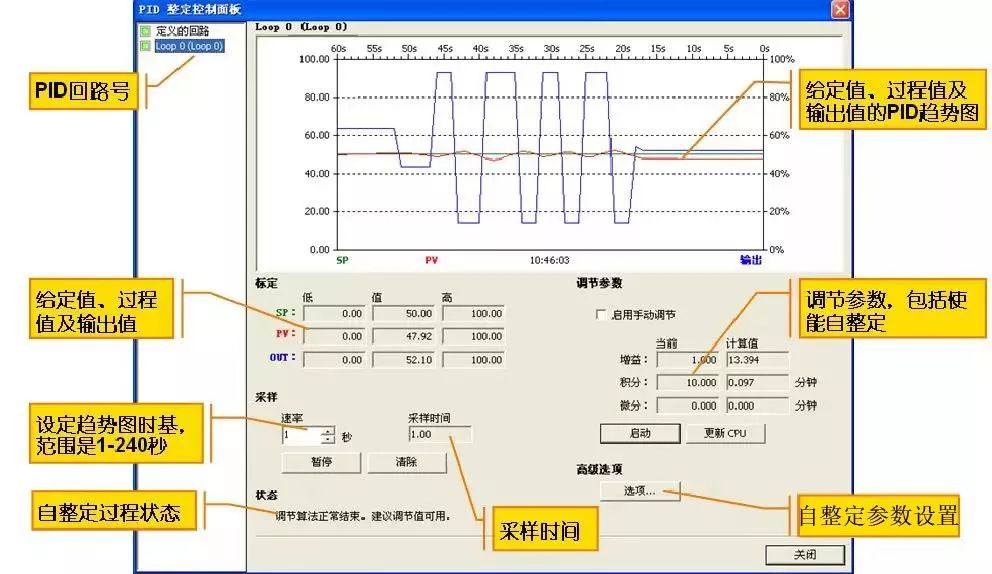
1、給定值和過(guò)程值共用圖形左側(cè)的縱軸,輸出使用圖形右側(cè)的縱軸
2、采樣時(shí)間是PID控制回路對(duì)反饋采樣和重新計(jì)算輸出值的時(shí)間間隔(在PID向?qū)渲弥懈模?/p>
3、速率:設(shè)置圖形顯示區(qū)所有顯示值的采樣更新速率時(shí)間
4、調(diào)節(jié)參數(shù):增益、積分和微分的當(dāng)前值
5、如果選擇啟用手動(dòng)調(diào)節(jié),可在計(jì)算值中修改PID參數(shù)
6、在自動(dòng)模式下,單擊“啟動(dòng)”按鈕,啟動(dòng)自整定,自整定完成后,單擊“更新”按鈕,可把參數(shù)寫進(jìn)CPU中
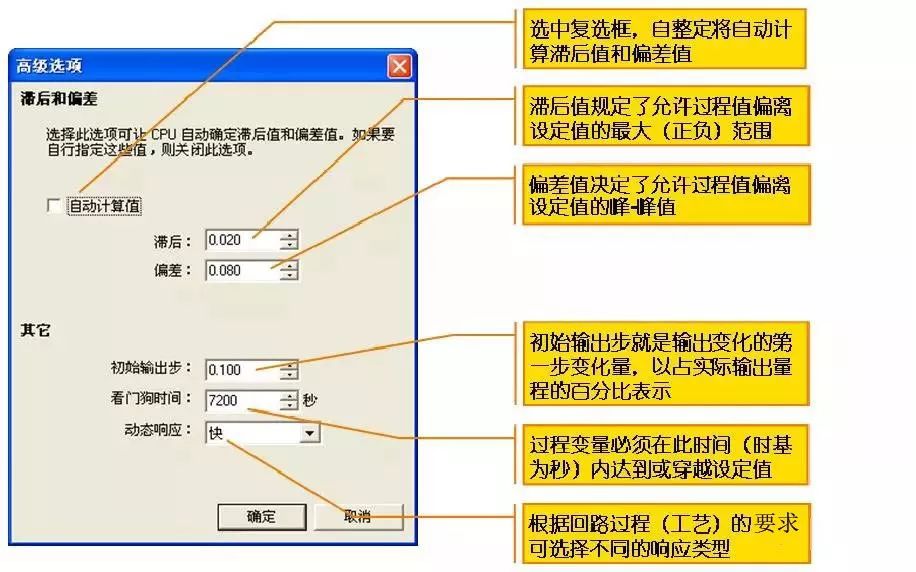
7、單擊“選項(xiàng)”可進(jìn)入自整定參數(shù)設(shè)置(如下圖)
七、PID常見(jiàn)問(wèn)題
1、 PID向?qū)傻某绦驗(yàn)楹尾粓?zhí)行?
確保用SM0.0無(wú)條件調(diào)用PID0_CTRL庫(kù)
在程序的其它部分不要再使用SMB34定時(shí)中斷,也不要對(duì)SMB34賦值
確認(rèn)當(dāng)前工作狀態(tài):手動(dòng)還是自動(dòng)
2、如何實(shí)現(xiàn)PID反作用調(diào)節(jié)?
在有些控制中需要PID反作用調(diào)節(jié)。 例如:在夏天控制空調(diào)制冷時(shí),若反饋溫度(過(guò)程值)低于設(shè)定溫度,需要關(guān)閥,減小輸出控制(減少冷水流量等)這就是PID反作用調(diào)節(jié)(在PID正作用中若過(guò)程值小于設(shè)定值,則需要增大輸出控制)
若想實(shí)現(xiàn)PID反作用調(diào)節(jié),需要把PID回路的增益設(shè)為負(fù)數(shù)。 對(duì)于增益為0的積分或微分控制來(lái)說(shuō),如果指定積分時(shí)間、微分時(shí)間為負(fù)值,則是反作用回路。
3、 如何根據(jù)工藝要求有選擇地投入PID功能?
可使用"手動(dòng)/自動(dòng)"切換的功能。 PID向?qū)傻腜ID功能塊需要保證每個(gè)掃描周期都調(diào)用,所以在主程序內(nèi)使用SM0.0調(diào)用。
4、 PID控制不穩(wěn)定怎么辦? 如何調(diào)試PID?
閉環(huán)系統(tǒng)的調(diào)試,首先應(yīng)當(dāng)做開(kāi)環(huán)測(cè)試。 所謂開(kāi)環(huán),就是在PID調(diào)節(jié)器不投入工作的時(shí)候,觀察:(1)反饋通道的信號(hào)是否穩(wěn)定(2)輸出通道是否動(dòng)作正常
可以試著給出一些比較保守的PID參數(shù),比如放大倍數(shù)(增益)不要太大,可以小于1,積分時(shí)間不要太短,以免引起振蕩。 在這個(gè)基礎(chǔ)上,可以直接投入運(yùn)行觀察反饋的波形變化。 給出一個(gè)階躍給定,觀察系統(tǒng)的響應(yīng)是最好的方法。
如果反饋達(dá)到給定值之后,歷經(jīng)多次振蕩才能穩(wěn)定或者根本不穩(wěn)定,應(yīng)該考慮是否增益過(guò)大、積分時(shí)間過(guò)短; 如果反饋遲遲不能跟隨給定,上升速度很慢,應(yīng)該考慮是否增益過(guò)小、積分時(shí)間過(guò)長(zhǎng)…… PID參數(shù)的調(diào)試是一個(gè)綜合的、互相影響的過(guò)程,實(shí)際調(diào)試過(guò)程中的多次嘗試是非常重要的步驟。
5、沒(méi)有采用積分控制時(shí),為何反饋達(dá)不到給定?
因?yàn)榉e分控制的作用在于消除純比例調(diào)節(jié)系統(tǒng)固有的“靜差”。 沒(méi)有積分控制的比例控制系統(tǒng)中,沒(méi)有偏差就沒(méi)有輸出量,沒(méi)有輸出就不能維持反饋值與給定值相等。 所以永遠(yuǎn)不能做到?jīng)]有偏差。
6、S7-200 SMART控制變頻器,在變頻器也有PID控制功能時(shí),應(yīng)當(dāng)使用誰(shuí)的PID功能?
可以根據(jù)具體情況使用。 一般來(lái)說(shuō),如果需要控制的變量直接與變頻器直接有關(guān),比如變頻水泵控制水壓等,可以優(yōu)先考慮使用變頻器的PID功能。
7、指令塊與向?qū)褂玫腜ID回路號(hào)是否可以重復(fù)?
不可以重復(fù),使用PID向?qū)r(shí),對(duì)應(yīng)回路的指令塊也會(huì)調(diào)用,所以指令塊與向?qū)褂玫腜ID回路號(hào)不能重復(fù),否則會(huì)產(chǎn)生預(yù)想不到的結(jié)果。
8、同一個(gè)程序里既使用PID指令塊又使用向?qū)В琍ID數(shù)目怎樣計(jì)算?
使用PID向?qū)r(shí),對(duì)應(yīng)回路的指令塊也會(huì)調(diào)用,所以PID指令塊與向?qū)б还仓С?個(gè)。
9、PID指令塊可以在主程序/子程序里調(diào)用嗎?
可以,但是不推薦,主程序/子程序的循環(huán)時(shí)間每個(gè)周期都可能不同,不能保證精確的采樣,建議用定時(shí)中斷,例如SMB34/SMB35。
10、SMB34定時(shí)最大255ms,如果采樣時(shí)間是1S怎樣實(shí)現(xiàn)?
采樣時(shí)間是1S,要求PID指令塊每隔1S調(diào)用一次。 可以先做一個(gè)250ms的定時(shí)中斷,然后編程累加判斷每4次中斷執(zhí)行一次PID指令即可。
11、 PID指令塊怎樣實(shí)現(xiàn)手動(dòng)調(diào)節(jié)?
可以簡(jiǎn)單地使用"調(diào)用/不調(diào)用"指令的方式控制自動(dòng)/手動(dòng)模式。 不調(diào)用PID指令時(shí),可以手動(dòng)給輸出地址0.0-1.0之間的實(shí)數(shù)。
-
控制器
+關(guān)注
關(guān)注
112文章
16416瀏覽量
178751 -
cpu
+關(guān)注
關(guān)注
68文章
10889瀏覽量
212377 -
SMART
+關(guān)注
關(guān)注
3文章
226瀏覽量
44722 -
PID
+關(guān)注
關(guān)注
35文章
1473瀏覽量
85648 -
S7-200
+關(guān)注
關(guān)注
13文章
408瀏覽量
50497
原文標(biāo)題:大神分享:PID項(xiàng)目實(shí)例詳解
文章出處:【微信號(hào):中泰PLC自動(dòng)化教學(xué),微信公眾號(hào):中泰PLC自動(dòng)化教學(xué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論