 M8029應用注意事項
M8029應用注意事項
一
動作描述
1、分別介紹各個定位指令的使用規則;
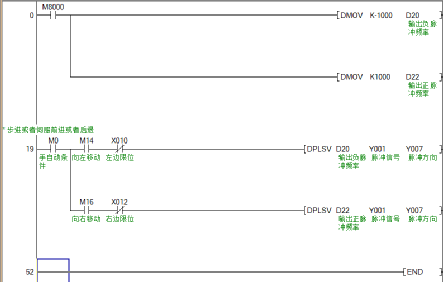
2、使用定位指令控制伺服步進,(以脈沖加方向的方式);
3、M8029應用注意事項。
二
硬件設備
1、三菱PLC :FX3U-32MT;
三
軟件

四
指令的介紹
首先使用輸出高速脈沖位置控制時,控制需要理解三個概念:
1、位置移動速度(脈沖頻率,每秒發送多少個脈沖)
2、位置移動距離(脈沖數量,脈沖數量對應滑臺的距離)
3、位置移動方向(方向輸出或雙向脈沖,控制電機前進或者后退)
1 PLSY
16位運算指令PLSY,從輸出Y(D)·中輸出(S1)·個數頻率為(S2)·的脈沖串。

S1中指定頻率。允許設定范圍:1~32767(Hz)
S2中指定發出的脈沖量,允許設定范圍:1~32767(PLS)
32位運算指令DPLSY
輸出D中輸出[S1·+1、S1]個數頻率為[S2+1、S2]的脈沖串。

在[S1+1、S1]中指定頻率,使用高速輸出特殊適配器時,允許設定范圍:1~200,000(Hz)
在使用FX3G·FX3U·FX3UC本體PLC時,允許設定范圍: 1~100,000(Hz)
在[S2+1、S2]中指定發出的脈沖量,允許設定范圍:1~2,147,483,647(PLS)
在指令中指定有脈沖輸出的Y編號,允許設定范圍:Y000、Y001 、Y002、Y003
絕對位置當前值數據寄存器
1、當前值是以原點為參考點的絕對地址值。工件移動時其數值隨工件移動而變化。其數值表示工件當前位置。
2、當PLC斷電時,當前值寄存器的當前值就會被清除而變0。
3、對不同系列的PLC,對應不同的脈沖輸出口,當前值寄存器的編號是不同的。
4、當驅動條件成立時,執行PLSY指令,從輸出口(Y0Y1Y2)輸出一個頻率為S1,脈沖個數為S2,占空比為50%的脈沖串,作定位控制命令用時,需要指定方向輸出口Y,PLSY沒有加減速時間設置,定位容易丟失脈沖或者過沖。
5、PLSY指令驅動后,采用中斷方式輸出脈沖串,因此不受掃描周期影響。如果在執行過程中指令驅動條件斷并,輸出馬上停止,再次驅動后,又會從最初開始輸出。該指令一般用來控制伺服或者步進電機的手動運行。
6、把指令中脈沖個數設置為K0,則指令的功能變為輸出無數個脈沖串,如下圖1,圖2為對應的特殊軟原件。
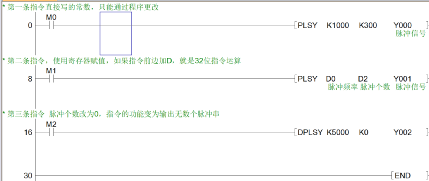
圖1

圖2
2 PLSV

S 輸出脈沖頻率或其存儲地址
D1 指定脈沖串輸出口,Y0或Y1指定旋轉方向的輸出端口,
D2 指定旋轉方向的輸出端口,ON:正轉,OFF:反轉。
指令前面加D,就是32位指令。
當驅動條件成立時,從輸出口D1輸出頻率為S的脈沖串。電機轉向信號由D2口輸出,如S為正值,則D2輸出為ON,電機正轉。如S為負值,則D2輸出為OFF,電機反轉。
1、在脈沖輸出過程中,如果將S變為K0,則脈沖輸出會馬上停止。同樣,如果驅動條件在脈沖輸出過程中斷開,則輸出馬上停止。
2、PLSV指令為可隨時改變脈沖的頻率,但在脈沖輸出過程中,最好不要改變輸出脈沖的方向(即由正頻率變為負頻率或相反)。如果要變更方向,可先將輸出頻率設為K0,并設定電機充分停止時間,再輸出不同方向的頻率值。
3、PLSV指令的缺點是在開始,頻率變化和停止時均沒有加減速動作。這就影響了指令的使用,因此,常常把PLSV指令和斜坡指令RAMP配合使用,利用斜坡指令RAMP的遞增,遞減速功能來實現PLSV指令的加,減速。
4、PLSV指令的缺點是在開始,頻率變化和停止時均沒有加減速動作。這就影響了指令的使用,因此,常常把'PLSV指令和斜坡指令RAMP配合使用,利用斜坡指令RAMP的遞增,遞減速功能來實現PLSV指令的加,減速。正常不做定位指令使用。
3PLSR
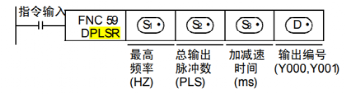

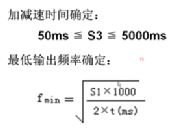
1、當驅動條件成立時,從輸出口D輸出最高頻率為S1,脈沖個數為S2,加減速時間為S3,占空比為50%的脈沖串。加減速時間不能分開控制,PLSR脈沖指令以一定的頻率發出目標值個脈沖,在指令中可以設置脈沖頻率、脈沖總數、和發出脈沖的輸出點;但只能控制脈沖,如果是脈沖加方向的脈沖模式,那方向點要另選一個普通開關點另外控制。方向信號先于脈沖指令給定,頻率和脈沖數設定。
2、輸出頻率S1的設定范圍是[(FX2N)10~20000HZ] [(FX1S)10~100000HZ],頻率設定必須是10的整數倍。2、輸出脈沖數的設定范圍是:16位運算為110~32767,32位運算為110~2147486947。當設定值不滿110時,脈沖不能正常輸出。
3、M8029:脈沖發完后,M8029閉合。當M0斷開后,M8029自動斷開。
4、M8147:Y0輸出脈沖時閉合,發完后脈沖自動斷開,用下降沿觸發轉下一步;
5、M8148:Y1輸出脈沖時閉合,發完后脈沖自動斷開,用下降沿觸發轉下一步;
6、M8149:Y2輸出脈沖時閉合,發完后脈沖自動斷開,用下降沿觸發轉下一步;
7、D8140:記錄Y0輸出的脈沖總數,32位寄存器;
8、D8142:記錄Y1輸出的脈沖總數,32位寄存器;
9、D8136:記錄Y0和Y1輸出的脈沖總數,32位寄存器 (針對FX1S)
4DRVA

S1 目標的絕對位置脈沖量
S2 輸出脈沖頻率
D1 輸出脈沖端口,僅能Y0或Y1
D2. 指定旋轉方向的輸出端口,ON:正轉,OFF:反轉
當驅動條件成立時,輸出口D1發出定位脈沖,電機以轉速S2轉動到位置為絕對位置值S1處。轉向由S1與當前位置值比較確定,S1大于當前值時,D2為ON,電機正轉;當S1小于當前值時,D2為OFF,電機反轉。
與DRVI指令相同
1、指令格式相同
2、特殊軟元件相同
3、速度與位置參數相同
4、運行時序相同
5、電機的轉向信號都是指令自動完成
與DRVI指令不同
目標位置表示不同
DRVI是用于相對于當前位置的移動量來表示目標位置,而DRVA是用相對于原點的絕對位置值來表示目標位置。
指令中所指定的脈沖數量不同
DRVI指令中所指定的脈沖數量就是PLC輸出的數量。而DRVA指令中所指定的數量不是PLC實際發出脈沖的數量。其實際輸出脈沖數是與指令驅動前當前值相運算的結果。
暫停再驅動效果不同
DRVI指令暫停后再驅動不能繼續原來的運行,而DRVA指令暫停后再驅動可以繼續原來的運行。
5DRVI

S1 輸出脈沖量(位置移動距離)
S2 輸出脈沖頻率(位置移動速度)
D1 輸出脈沖端口,僅能Y0或Y1
D2 指定旋轉方向的輸出端口(位置移動方向), ON:正轉,OFF:反轉.
相對定位,相對位移是指移位后位置坐標與當前位置坐標的位移量。
位置控制三要素
1、位置移動方向(電機轉動方向)
2、位置移動速度(電機轉速)
3、位置移動距離(相對或絕對)
當驅動條件成立時,輸出口D1發出定位脈沖,電機以轉速S2轉動S1個脈沖數。轉向由S1的正、負確定。S1為正,D2為ON,電機正轉;S1為負,D2為OFF,電機反轉。
最高速度
電機運行時出最高速度,電機實際運行速度必須小于該值。
最高速度存于寄存器D8147(高位),D8146(低位)中,其設定范圍為10—100kHZ。出廠值為100kHZ。
運行速度,指令對運行速度有如下限制:最低速度≤運行速度<最高速度。
基底速度,電機運行的起動速度,也即當電機從位置A向位置B移動時,并不是從0開始加速,而是從基底速度開始加速到運行速度。基底速度存于寄存器D8145,出廠值為0,基底速度是針對步進電機運行所設的速度參數,對伺服電機來說,基底速度可設為0。
加減速時間,加速時間指電機從當前位置加速到最高轉速的時間。減速時間指電機從最高轉速下降到當前位置的時間。
當輸出脈沖頻率小于最高速度時,實際加減速時間要小一些。
1、指令驅動后,如果驅動條件OFF,則將減速停止,但完成標志位M8029并不動作。
2、如果在指令執行中改變指令的操作內容,這種改變不能更改當前的運行。只能在下一次執行時才生效。
3、電機的方向信號(D2)都是指令自動完成的,不需要在程序中另行考慮。
4、指令在執行過程中,輸出的脈沖數以增量的方式存入當前值寄存器。正轉時當前值增加,反轉時則減少。所以相對位置控制指令又叫做增量式驅動指令。
6M8029
M8029指令執行結束標志
M8329指令執行異常結束標志
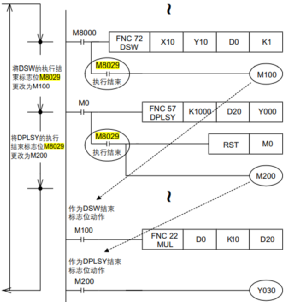
1.多個標志位的程序(指令執行結束標志位M8029的例子)
對使用相同標志位動作的應用指令而言、將指令執行結束標志位M8029集中使用編程時,難于判斷哪個指令的執行內容導致標志位控制執行,此外也可能不能正常讀取各個指令相對應的標志位。
在應用指令的正下方以外的位置中使用時.請參考下一頁的內將。
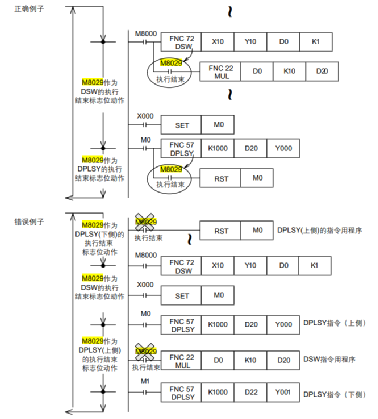
2.在應用指令的正下方以外的位置中任用的方法介紹
對多個應用指令編程后,一般標志位會根據各自的應用指令的ON執行進行變化。
因此,想要在該指令的正下方以外的位置中使用時,先在應用指令的正下方用一般標志位,ON/OFF其他的位軟元件,然后將該觸點作為指令觸點使用。
在三菱FX系列PLC中數據寄存器D8000與輔助繼電器M8000之后屬于特殊的寄存器或是繼電器。這些特殊寄存器和繼電器都有特定的含義,如對于特殊繼電器,常用的有M8000,M8002。
M8029也是一個常用的特殊繼電器,它是指令執行完成標志。既在指令執行完成后,輸出這個M8029信號。
因為M8029是指令執行完成標志,那在編程時就可以用這個標志做以下一些工作。判斷指令是否執行完成,通過判斷M8029是否接通,可以判斷指令是否完成。
可以用這個標志啟動下一個執行指令,在程序中有時會有多個執行指令,一個指令需要在前一個指令執行完成后再去執行,那就可以用上一個指令的完成標志去啟動下一個指令。
(1)M8029雖是指令執行完成標志,但不是所有的指令執行完都會輸出這個標志,是部分指令,如手冊中提到的DSW(數值開關)RAMP(斜坡信號),以及在控制伺服、步進電機時用到的定位指令或是脈沖指令。
(2)M8029要是在指令正常完成后才會輸出,如果是指令在執行過程中,指令前面的條件不成立,造成指令沒有完全執行完就停止執行,則這個標志不會輸出。
(3)M8029指令完成信號,只是一個脈沖信號,它只是在對應的指令完成后的一個掃描周期時成立,在其后的掃描周期會斷開。這樣如果是監控程序時肉眼去觀察這個信號有沒有接通是很難看到的,如果是編程時需要瞬時信號,那就可以直接用M8029信號,如果需要連續的信號,那可以用M8029置位一個信號。比如INCP 自加一指令來驗證是否接通過。
(4)M8029作為指令執行完成標志,而一個正常的工程程序中可能有多個不同指令,即使是一個指令也可能是用到幾次,此時要注意這些指令執行完成的標志都是同一個標志M8029,要避免一個指令的完成標志對另一個指令完成標志的影響,所以要在程序中要注意M8029要在各自的指令后面編寫。
在PLC中定位指令結束后,會輸出完成標志M8029,可以用這個標志判斷定位完成,然后進行下一步動作。
定位指令中還有一個標志M8147(Y0脈沖輸出中監控),對于FX3U/G是M8348。當有脈沖輸出時有信號輸出。
M8029對應結束后的一個周期,而且是正常完成后的標志,所以用M8029作為標志更嚴謹。
如果一步定位完成后,有例如電磁閥控制氣缸等動作,可以用M8029控制Y這樣的信號輸出。
如果一步定位完成后,有其它的定位動作,可以用M8029再次啟動定位指令。
如果一步定位完成后,有數據處理,那可以用M8029標志進行四則運算。
五
程序思路及編寫
手動程序如下:
審核編輯 :李倩
-
plc
+關注
關注
5016文章
13369瀏覽量
464630 -
脈沖
+關注
關注
20文章
897瀏覽量
95704 -
步進電機
+關注
關注
151文章
3117瀏覽量
147701
原文標題:
文章出處:【微信號:跟我學PLC,微信公眾號:跟我學PLC吧】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Cortex-M內核使用FreeRTOS特別注意事項






 工商網監
工商網監
評論