") 單脈沖雷達(dá)是指什么?
單脈沖雷達(dá)是指什么?
單脈沖雷達(dá)(monopulse radar)是一種精密跟蹤雷達(dá),其設(shè)計(jì)的初衷是為了克服圓錐掃描和順序波束轉(zhuǎn)換跟蹤技術(shù)對(duì)回波幅度起伏和幅度干擾敏感,從而造成錯(cuò)誤的目標(biāo)角度跟蹤誤差的問題。這種技術(shù)最初叫同時(shí)多波束技術(shù),它能同時(shí)提供對(duì)角誤差敏感所需要的所有波束,在單個(gè)脈沖上同時(shí)比較各個(gè)波束的輸出,從而可以回波幅度隨時(shí)間變化的影響。后來采用單脈沖這個(gè)術(shù)語(yǔ),指能夠在單個(gè)脈沖上獲得角誤差信息的能力。
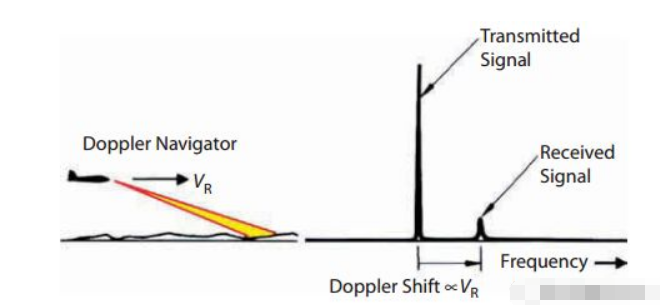
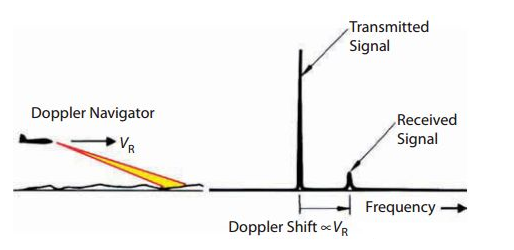
單脈沖雷達(dá)通常有比幅單脈沖雷達(dá)和比相單脈沖雷達(dá)兩大類。它有較高的測(cè)角精度、分辨率和數(shù)據(jù)率,但設(shè)備比較復(fù)雜。單脈沖雷達(dá)主要用于目標(biāo)識(shí)別、靶場(chǎng)精密跟蹤測(cè)量、彈道導(dǎo)彈預(yù)警和跟蹤、導(dǎo)彈再入彈道測(cè)量、火箭和衛(wèi)星跟蹤、武器火力控制、炮位偵察、地形跟隨、導(dǎo)航、地圖測(cè)繪等。
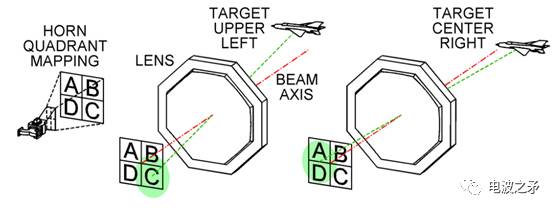
一個(gè)比幅單脈沖饋源設(shè)計(jì)成能檢測(cè)“斑點(diǎn)”離開聚焦平面中心的任何橫向位移。例如,一個(gè)采用四喇叭方形的單脈沖饋源,其中心放在焦點(diǎn)上。它是對(duì)稱的,當(dāng)“斑點(diǎn)”落在中心時(shí)四喇叭中的每一個(gè)喇叭收到的能量均相等。如果目標(biāo)離開軸線,就會(huì)使“斑點(diǎn)”移動(dòng),于是在各喇叭中的能量就會(huì)不平衡。
雷達(dá)通過比較在各個(gè)喇叭中激起的回波信號(hào)幅度來檢測(cè)目標(biāo)的位移。這是靠采用微波混合電路使兩對(duì)喇叭的輸出相減來完成的。只要目標(biāo)離開軸線,即引起了不平衡,就會(huì)有敏感器件給出信號(hào)輸出。
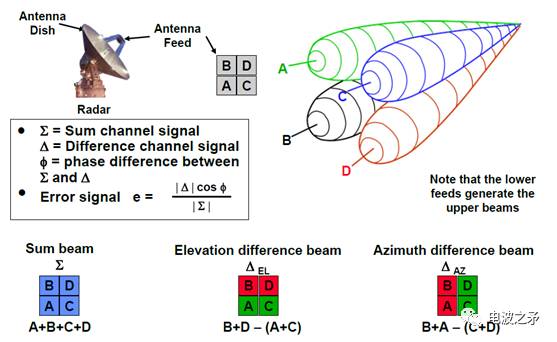
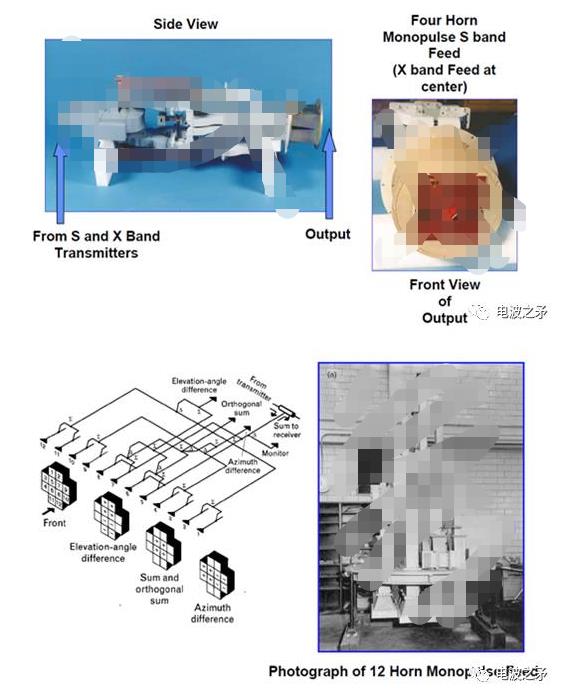
常規(guī)的四喇叭方形饋源所用的微波電路如下圖所示,從右邊一對(duì)輸出中減去左邊一對(duì)輸出以檢測(cè)方位角方向上的任何不平衡,同時(shí)從下面一對(duì)輸出中減去上面一對(duì)輸出以檢測(cè)仰角方向上的任何不平衡。
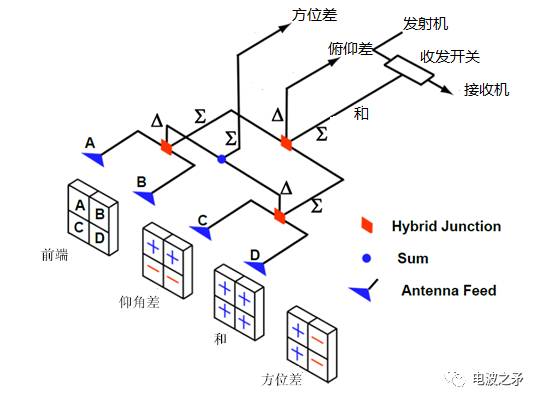
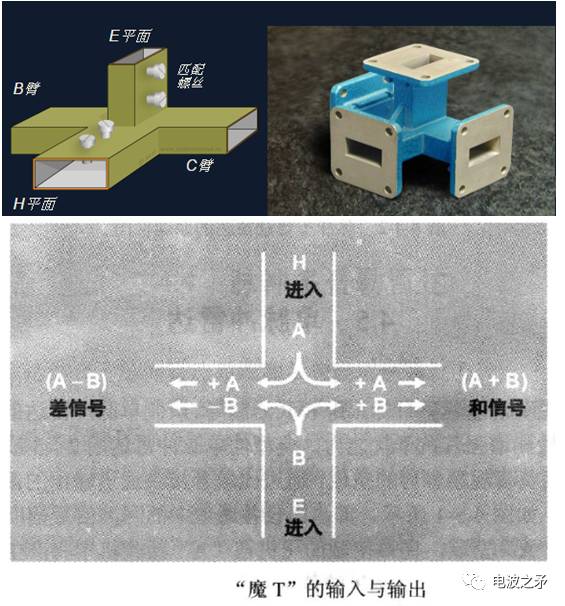
圖中的比較器實(shí)現(xiàn)了饋源輸出的加減,從而得到了單脈沖的和、差信號(hào)。這可以用混合T型或魔T波導(dǎo)器件實(shí)現(xiàn)。它們是四口器件,其基本形式的輸入口和輸出口在位置上是相互垂直的。現(xiàn)已開發(fā)出方便的“折疊”結(jié)構(gòu)的魔T波導(dǎo)接頭是非常緊湊的比較器組件。
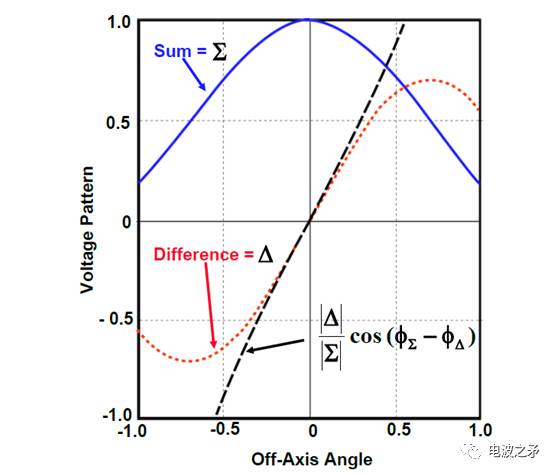
相減器的輸出稱為差信號(hào)。當(dāng)目標(biāo)在軸線上時(shí),差信號(hào)為零。當(dāng)目標(biāo)偏離軸線的位移增加時(shí),差信號(hào)的幅度就會(huì)增加。當(dāng)目標(biāo)從中心的一邊變到另一邊時(shí),差信號(hào)的相位改變180°。4個(gè)喇叭輸出的總和提供一個(gè)參考信號(hào),以便即使目標(biāo)回波信號(hào)在大動(dòng)態(tài)范圍內(nèi)變化時(shí)仍能得到穩(wěn)定的角跟蹤靈敏度(每度誤差的電壓伏數(shù))。為了保持角跟蹤環(huán)路增益的恒定以達(dá)到穩(wěn)定的自動(dòng)角跟蹤,AGC是必要的。
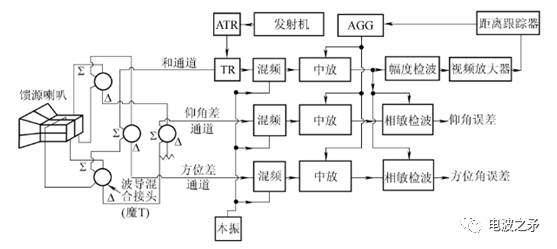
典型的單脈沖雷達(dá)的框圖如下。和信號(hào)、仰角差信號(hào)、方位差信號(hào)采用同一個(gè)本振各自變換成中頻(IF),以便在中頻上仍維持相對(duì)的相位關(guān)系。將中頻和信號(hào)檢波后輸出,變成視頻輸出給測(cè)距機(jī)。測(cè)距機(jī)確定所需目標(biāo)回波的到達(dá)時(shí)刻,并提供波門脈沖以使部分接收機(jī)只在所需期待目標(biāo)的短暫時(shí)間內(nèi)接通。
將經(jīng)過波門選通的視頻用來產(chǎn)生正比于?或|?|的AGC直流電壓來控制三路中放通道增益。即使目標(biāo)回波信號(hào)在很大的動(dòng)態(tài)范圍內(nèi)變化,AGC通過控制增益或除以|?|也能使角跟蹤靈敏度(每度誤差的電壓伏數(shù))不變。為了穩(wěn)定自動(dòng)角跟蹤,必須用AGC保持角跟蹤環(huán)路的增益不變。
典型應(yīng)用
單脈沖測(cè)角體制是一種典型的同時(shí)多波束測(cè)角方法,這種同時(shí)多波束的測(cè)角方法具有很強(qiáng)的抗干擾能力,如目標(biāo)上的自衛(wèi)式噪聲干擾、轉(zhuǎn)發(fā)式脈沖調(diào)幅干擾、逆增益應(yīng)答式欺騙干擾都對(duì)單脈沖角度跟蹤系統(tǒng)的工作影響很小,甚至沒有影響。同時(shí),受單脈沖測(cè)角體制的影響,這種測(cè)角體制本質(zhì)上是跟蹤目標(biāo)回波信號(hào)的波前(等相位面),因此任何改變相位波前的因素,都會(huì)影響測(cè)角精度,這實(shí)際上為我們提供了針對(duì)單脈沖測(cè)角體制導(dǎo)引頭干擾的可能途徑——角度欺騙干擾,如交叉眼干擾。
審核編輯:劉清
-
微波電路
+關(guān)注
關(guān)注
2文章
59瀏覽量
17415 -
AGC
+關(guān)注
關(guān)注
0文章
161瀏覽量
51665 -
比較器
+關(guān)注
關(guān)注
14文章
1651瀏覽量
107217 -
相減器
+關(guān)注
關(guān)注
0文章
2瀏覽量
5237 -
脈沖雷達(dá)
+關(guān)注
關(guān)注
1文章
29瀏覽量
10237
原文標(biāo)題:?jiǎn)蚊}沖雷達(dá)
文章出處:【微信號(hào):CloudBrain-TT,微信公眾號(hào):云腦智庫(kù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

一種低重頻脈沖雷達(dá)的速度解算方法

三路單脈沖雷達(dá)接收機(jī)DAGC技術(shù)的工程實(shí)現(xiàn)

單脈沖雷達(dá)幅相不一致校正方法研究
脈沖雷達(dá)的優(yōu)勢(shì)_脈沖雷達(dá)的波形參數(shù)
科普-脈沖雷達(dá)的基礎(chǔ)知識(shí)
脈沖雷達(dá)的優(yōu)點(diǎn),脈沖波形參數(shù)
高頻脈沖雷達(dá)物位計(jì)具有哪些應(yīng)用優(yōu)勢(shì)和特點(diǎn)
脈沖雷達(dá)和調(diào)頻連續(xù)波雷達(dá)的區(qū)別
FMCW和線性調(diào)頻脈沖雷達(dá)
揭秘單脈沖雷達(dá)精準(zhǔn)鎖定目標(biāo)技術(shù)

什么是脈沖雷達(dá)
數(shù)字單脈沖多普勒雷達(dá)與DSP教學(xué)

使用TMS320C40 DSP實(shí)現(xiàn)單脈沖雷達(dá)的數(shù)字跟蹤器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論