

對(duì)于許多嵌入式項(xiàng)目來說,在采用非實(shí)時(shí)操作系統(tǒng)(non-RTOS)的任何場(chǎng)合,也都可采用RTOS。但是,要找到一款具有完全相同應(yīng)用編程接口(API)的匹配RTOS就相當(dāng)困難了。因此,許多傳統(tǒng)的操作系統(tǒng)(OS)在其內(nèi)嵌入了一個(gè)RTOS。例如,Lynux-Works LynxOS和Bluecat Linux共享一個(gè)Linux API。LynxOS是一款硬RTOS,而Bluecat是Linux的一個(gè)衍生產(chǎn)品。
Linux繼續(xù)在努力改善其實(shí)時(shí)性能,但其最長(zhǎng)中斷時(shí)延仍無法滿足對(duì)RTOS來說至關(guān)重要的硬(hard)實(shí)時(shí)要求。這些問題最后都會(huì)歸結(jié)為服務(wù)質(zhì)量(QoS)。像RTLinux Free這樣的平臺(tái)補(bǔ)充了Linux,因?yàn)樗鼈兛商峁┯矊?shí)時(shí)級(jí)別的QoS。
要指出的很重要一點(diǎn)是:這類補(bǔ)充常常是在原始OS上集成一個(gè)RTOS編程環(huán)境。與傳統(tǒng)臺(tái)式或服務(wù)器OS相比,RTOS通常要小很多。RTOS常常針對(duì)更小和資源有限的MCU。例如,CMX的CMX-RTX和CMX-Tiny+可運(yùn)行在8位MCU到64位處理器上。
RTOS核心:調(diào)度和分割
大多數(shù)程序員不熟悉RTOS的限制和要求。大多數(shù)人通常因其性能選擇RTOS。大多數(shù)RTOS產(chǎn)品代碼少和速度快,現(xiàn)在RTOS還提升了一致性。RTOS除能很快完成任務(wù)外,還能保證很好地完成任務(wù)。
在許多應(yīng)用中,一個(gè)遲到的結(jié)果可以是災(zāi)難性的。因此,人們寧愿在一個(gè)要求的時(shí)限內(nèi)獲得較差的結(jié)果。這些應(yīng)用通常被稱為硬實(shí)時(shí)系統(tǒng)。硬實(shí)時(shí)不是指系統(tǒng)響應(yīng)有多快或多快一個(gè)系統(tǒng)能響應(yīng),而是指系統(tǒng)能多可靠地滿足特定的要求。
一個(gè)硬實(shí)時(shí)系統(tǒng)可能有一個(gè)一分鐘的固定周期時(shí)間,它要求的響應(yīng)時(shí)間為一秒。理論上,這樣的要求幾乎所有的操作系統(tǒng)都能實(shí)現(xiàn)。但事實(shí)并非總是如此,正如任何一個(gè)人都能證明等待臺(tái)式計(jì)算機(jī)應(yīng)用在一分鐘之內(nèi)做出響應(yīng)需要等多久。
硬實(shí)時(shí)系統(tǒng)通常具有更短的周期時(shí)間和更嚴(yán)苛的響應(yīng)要求。更快的處理器速度總是有幫助的,多內(nèi)核平臺(tái)也能改善響應(yīng)速度。對(duì)開發(fā)人員來說,竅門在于把系統(tǒng)需求與硬件和軟件匹配起來,然后才是RTOS在嵌入式應(yīng)用中的重要性。
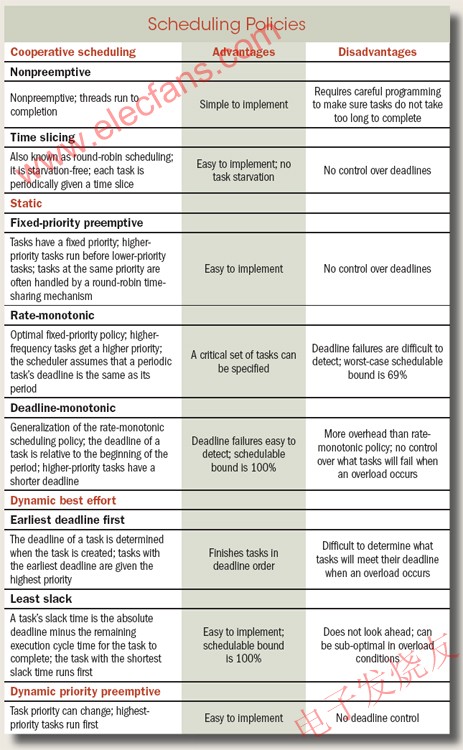
一個(gè)RTOS可以實(shí)現(xiàn)一系列調(diào)度策略,但應(yīng)用經(jīng)常會(huì)制約一個(gè)程序員的選擇(見表)。非優(yōu)先式調(diào)度(non-preemptive scheduling)的實(shí)現(xiàn)雖不重要,但在一些應(yīng)用中很有用。另一方面,任務(wù)內(nèi)的非優(yōu)先式調(diào)度可在優(yōu)先式系統(tǒng)的頂部實(shí)現(xiàn)。
不應(yīng)該輕忽非優(yōu)先式調(diào)度,特別在新型多內(nèi)核處理器出現(xiàn)以后。這里,硬件可被調(diào)整到處理一個(gè)基于事件的操作,其中線程將等待外部事件的發(fā)生。對(duì)處理多線程的單核處理器來說,該方法一般不適用。但對(duì)有許多內(nèi)核的多核系統(tǒng)說,典型情況是為一個(gè)外設(shè)指定一個(gè)核。所以,在等待事件發(fā)生期間,使該核空閑起來是有意義的。
其結(jié)果是,優(yōu)先式、中斷驅(qū)動(dòng)的RTOS架構(gòu)占據(jù)了業(yè)已部署的大部分平臺(tái)。雖然借助硬件手段(多個(gè)寄存器組合、硬件調(diào)度、任務(wù)切換、以及分層中斷優(yōu)先級(jí)系統(tǒng)等)可顯著縮短中斷時(shí)延,但該時(shí)延永遠(yuǎn)是一個(gè)問題。相關(guān)推薦:一種STM32框架,實(shí)現(xiàn)RTOS的部分功能。
優(yōu)先式處理會(huì)帶來若干問題。它們大多是與時(shí)序關(guān)聯(lián)的,如競(jìng)爭(zhēng)條件、死循環(huán)、空耗等待和優(yōu)先級(jí)轉(zhuǎn)換,它們發(fā)生在低優(yōu)先級(jí)任務(wù)A擁有更高優(yōu)先級(jí)任務(wù)B的同步資源,而優(yōu)先級(jí)比A高的任務(wù)C正在運(yùn)行。
如果沒有像優(yōu)先級(jí)置頂(priority ceilings)這樣的特性,任務(wù)C就可以阻止任務(wù)A和任務(wù)C運(yùn)行。優(yōu)先級(jí)置頂特性可以把任務(wù)A的優(yōu)先級(jí)改變成與任務(wù)C的優(yōu)先級(jí)一樣,從而允許任務(wù)A運(yùn)行并最終釋放任務(wù)C所需的資源。至此,任務(wù)A的優(yōu)先級(jí)復(fù)原,任務(wù)C就可以繼續(xù)運(yùn)行。
程序員必須解決的其它與時(shí)序相關(guān)的問題通常是難以定位和糾正的缺陷源。在定位這些缺陷時(shí)跟蹤工具就變成了很有價(jià)值的手段,因?yàn)橹T如受阻的任務(wù)等癥候是這些問題的唯一表現(xiàn)形式。
就操作系統(tǒng)所需的特性來看,重入庫(reentrant library)特性在RTOS環(huán)境下是可有可無的。但在一個(gè)典型的操作系統(tǒng)中,由于任務(wù)和程序常常是隨機(jī)的和變化的,而且常公用庫,因此重入庫是一個(gè)必須的特性。
在嵌入式環(huán)境中,對(duì)在系統(tǒng)中運(yùn)行的程序和任務(wù)一般會(huì)有更多的控制要求。通常,除操作系統(tǒng)接口(可以是重入也可能是非重入的)外,各任務(wù)從不共享任何代碼。程序員(特別是那些負(fù)責(zé)設(shè)備驅(qū)動(dòng)程序的)需要注意這一重入性問題。
現(xiàn)在業(yè)內(nèi)已有很多的任務(wù)同步機(jī)制,從互斥(mutex)到消息系統(tǒng)。從RTOS的角度,這些機(jī)制在諸如競(jìng)爭(zhēng)條件此類的同步問題上,沒有什么差異。
在MCU和操作系統(tǒng)中,定時(shí)器很常見。至少,一個(gè)定時(shí)器可被用作時(shí)鐘。但由于定時(shí)器是如此的有用,以至于它常以一種特殊方式實(shí)現(xiàn)出來。POSIX規(guī)范甚至把定時(shí)器定義為組件。定時(shí)器還可當(dāng)作看門狗來用。
在許多MCU中,一個(gè)定時(shí)器可以設(shè)置用來喚醒處在休眠模式的系統(tǒng)。一些實(shí)現(xiàn)允許操作系統(tǒng)把其用作一個(gè)通用定時(shí)器,盡管這一喚醒特性獨(dú)立于操作系統(tǒng)。
一些系統(tǒng)具有帶不同特性的多種定時(shí)器來滿足不同的要求。一些定時(shí)器可被同步用以為電機(jī)控制應(yīng)用提供同時(shí)的脈寬調(diào)制(PWM)流。對(duì)RTOS來說,一個(gè)定時(shí)器通常可用以實(shí)現(xiàn)時(shí)鐘和提供時(shí)間切片支持。
定時(shí)器也支持時(shí)間切片。時(shí)間切片常見于時(shí)間共享系統(tǒng),它給每種應(yīng)用一個(gè)合理的時(shí)間片斷來執(zhí)行。可在任一中斷層級(jí)上實(shí)現(xiàn)這種輪詢調(diào)度。
通常,由時(shí)鐘提供的時(shí)間切片是固定時(shí)長(zhǎng)的,每個(gè)任務(wù)在獲得優(yōu)先權(quán)前將被給予同樣長(zhǎng)度的時(shí)間切片來執(zhí)行。當(dāng)然,該策略是隨機(jī)的且可有多種實(shí)現(xiàn)。例如,可變的時(shí)間切片寬度將允許時(shí)間以每個(gè)任務(wù)為單位進(jìn)行分配,其中一些任務(wù)獲得的時(shí)間會(huì)比另一些長(zhǎng);而若采用任務(wù)優(yōu)先級(jí)方法,則有可能使低優(yōu)先級(jí)任務(wù)得不到響應(yīng)。
許多RTOS采用固定調(diào)度器。其它RTOS則允許替換或定制,但RTOS中的另一部分支持各種策略。這一靈活方法使得像Linux這樣的操作系統(tǒng)能夠提供實(shí)時(shí)支持,與此同時(shí),它們還能在時(shí)間切片環(huán)境下運(yùn)行多種應(yīng)用。實(shí)時(shí)任務(wù)具有高優(yōu)先級(jí),且在一般用戶任務(wù)前得到執(zhí)行。
Linux實(shí)際上具有一個(gè)更復(fù)雜的調(diào)度系統(tǒng),它對(duì)任務(wù)是通過輪詢方法把控制權(quán)轉(zhuǎn)交給具有相同優(yōu)先級(jí)的其它任務(wù)還是一直運(yùn)行到結(jié)束做出了具體約定。像Open Kernel Labs的OKL4虛擬化RTOS平臺(tái)解決了該問題。
基本通信
一些文獻(xiàn)把任務(wù)同步和通信分開來說,但總的來說,它們是一回事。實(shí)際上就是講信息是如何交換的。基于消息傳遞的RTOS最清楚地體現(xiàn)出這點(diǎn)。這里,消息系統(tǒng)處理所有通信且不區(qū)分通信和同步。
至少,RTOS必須提供一個(gè)相互排斥的本原,如互斥。其它東西可構(gòu)建在該本原上。在許多場(chǎng)合,如消息傳遞系統(tǒng),對(duì)相互排斥的支持隱藏在操作系統(tǒng)內(nèi)。只有更高級(jí)別的消息功能顯露于外。
消息系統(tǒng)有各種名稱,從管道到隊(duì)列。其實(shí)現(xiàn)可橫跨從單處理器、單存儲(chǔ)器模式到多內(nèi)核群集系統(tǒng)。Enea的OSE RTOS和QNX的Neutrino是基于消息傳遞的兩個(gè)主線RTOS。
不管選擇了什么方法或API,通信系統(tǒng)必須在某一程度上被整合進(jìn)操作系統(tǒng)。因此,若主動(dòng)隊(duì)列中的任務(wù)必須等待一個(gè)事件,則該任務(wù)可被移走。類似,引發(fā)一個(gè)事件從而導(dǎo)致另一個(gè)任務(wù)活動(dòng)的任務(wù)將產(chǎn)生一個(gè)調(diào)度行為。
通信、事件和調(diào)度可與硬件關(guān)聯(lián)起來,這是RTOS必須處理的其它一些事。TI的DSP/BIOS是一款RTOS,它設(shè)計(jì)用于運(yùn)行在像TI的DaVinci雙核系統(tǒng)的DSP上。DSP/BIOS的一個(gè)主要功能是處理 ARM 核和DSP 核間的通信。
向更多大內(nèi)核的發(fā)展將很可能會(huì)保留RTOS或OS。不過,小內(nèi)核阻止或限制了采用RTOS的可能性。Intellasys的SEAforth 40C18芯片帶有40個(gè)運(yùn)行Forth的小型18位內(nèi)核。指令很精簡(jiǎn),每個(gè)字包含四條指令。
每個(gè)內(nèi)核有64個(gè)字的 ROM和RAM,該芯片只能容納10,000指令。當(dāng)然,這只夠裝下一個(gè)程序,安裝RTOS是不可能的。不過,整個(gè)芯片上有足夠空間安裝一個(gè)操作環(huán)境的特定部分。同樣,適于該平臺(tái)的應(yīng)用常常是特定的。于是,由于硬件可處理內(nèi)核之間通信和任務(wù)調(diào)度,因此RTOS類的支持并不需要。
資源管理
使RTOS脫穎而出的是其管理資源(包括時(shí)間和存儲(chǔ)器)的能力。時(shí)序問題與中斷響應(yīng)時(shí)間有關(guān),但資源管理時(shí)序問題也會(huì)出現(xiàn)。雖然中斷解決了一系列時(shí)序問題,但各應(yīng)用仍必須利用資源。
考慮存儲(chǔ)器分配情況。許多實(shí)時(shí)應(yīng)用不采用動(dòng)態(tài)存儲(chǔ)器分配,以確保存儲(chǔ)器分配和回收時(shí)所產(chǎn)生的不同不會(huì)變成一個(gè)問題。需要?jiǎng)討B(tài)存儲(chǔ)器分配的應(yīng)用常把存儲(chǔ)器劃分為實(shí)時(shí)和非實(shí)時(shí)。后者處理動(dòng)態(tài)存儲(chǔ)器分配。典型情況下,在使用前,實(shí)時(shí)部分必須被分配有足夠的存儲(chǔ)器。
在實(shí)時(shí)嵌入式應(yīng)用中采用C和C++是因?yàn)榇鎯?chǔ)器和其它資源的用法是顯式的。實(shí)時(shí)任務(wù)需要避免采用C和C++。特別是,當(dāng)存儲(chǔ)器分配和回收更容易隱藏時(shí)采用C++是很困難的。
像Java和C#這樣的語言帶來的挑戰(zhàn)更大,它們與生俱來地采用動(dòng)態(tài)存儲(chǔ)器分配。程序員可控制存儲(chǔ)器分配和回收。在某些情況下,編程環(huán)境可以強(qiáng)化存儲(chǔ)器分配和回收。
Java實(shí)時(shí)規(guī)范(RTSJ)定義了創(chuàng)建不需要垃圾回收的Java應(yīng)用的方法。RTSJ是在Java框架內(nèi)這樣做的,從而使程序員在不被存儲(chǔ)器分配限制的條件下享有Java的好處。
Sun和DDC-I都實(shí)現(xiàn)了RTSJ。DDC-I的實(shí)現(xiàn)支持x86和PowerPC平臺(tái)。Aonix有一個(gè)稱為PERC的類似平臺(tái)。這些平臺(tái)以實(shí)時(shí)、同時(shí)的垃圾回收為特征,從而使在不受存儲(chǔ)器分配限制的情況下,在Java內(nèi)編寫實(shí)時(shí)應(yīng)用成為可能。
但因系統(tǒng)必須允許線程為垃圾回收器進(jìn)行轉(zhuǎn)換,所以實(shí)時(shí)要求并非那么緊迫。另一方面,垃圾回收器將耗費(fèi)時(shí)序資源,所以,只有實(shí)時(shí)任務(wù)方可保證滿足一定的期限要求。快是好事,但及時(shí)才是RTOS的天條。
考察實(shí)時(shí)平臺(tái)時(shí),考慮之一是存儲(chǔ)器分配對(duì)系統(tǒng)的整體影響。許多系統(tǒng)可工作在從不改變的靜態(tài)分配環(huán)境,但更多的動(dòng)態(tài)系統(tǒng)可從實(shí)時(shí)垃圾回收中獲益。研究表明,垃圾回收的效益與確定的存儲(chǔ)器分配是可比的。
圍繞諸如Java和C#等虛擬機(jī)類型平臺(tái)的另一個(gè)問題是對(duì)just-in-time(JIT)編譯器的使用限制。基于這些系統(tǒng)的實(shí)時(shí)系統(tǒng)必須采用類似C和C++等所用的提前(ahead-of time,AOT)編譯器。
設(shè)計(jì)師會(huì)因其更高的生產(chǎn)力、更低的出錯(cuò)率以及安全性等特點(diǎn)選用Java 或C#。所以,對(duì)制定一個(gè)稱為 JSR-302的用于對(duì)安全有至高要求應(yīng)用的Java規(guī)范就不足為奇了。
保護(hù)RTOS
RTOS受到其運(yùn)行的硬件平臺(tái)的限制。可對(duì)缺少存儲(chǔ)器保護(hù)的硬件加以保護(hù),但安全級(jí)別會(huì)受到限制。但存儲(chǔ)器和虛擬機(jī)可以更高水平的安全性支持引導(dǎo)。諸如SE Linux、Green Hills Integrity和 LynuxWorks LynxSecure Embedded Hypervisor以及 LynxOS-SE RTOS內(nèi)的安全策略可比典型RTOS提供可靠得多的保護(hù)。但成本也高,所以開發(fā)者需對(duì)此進(jìn)行權(quán)衡。
實(shí)時(shí)系統(tǒng)開發(fā)者不得不應(yīng)對(duì)策略實(shí)現(xiàn)和邊界問題。取決于信息的來所去處,安全支持會(huì)花很長(zhǎng)時(shí)間。正是為此引入了分區(qū)系統(tǒng),所以,可在邊界采取安全措施且把應(yīng)用的非實(shí)時(shí)部分放在這部分空間內(nèi)。
可感知OS的調(diào)度器
當(dāng)考慮選用操作系統(tǒng)時(shí),對(duì)調(diào)試器的支持是個(gè)關(guān)鍵。這種支持體現(xiàn)在兩個(gè)方面:內(nèi)核和設(shè)備驅(qū)動(dòng)器調(diào)試以及操作系統(tǒng)感知。
內(nèi)核調(diào)試對(duì)設(shè)備驅(qū)動(dòng)器的創(chuàng)建和支持以及內(nèi)核強(qiáng)化很重要。在許多情況,為處理RTOS的內(nèi)核,需要專用調(diào)試器。它也要求能理解內(nèi)核環(huán)境以及應(yīng)用環(huán)境。
OS感知可更深入地了解操作系統(tǒng)。支持方式可以是從提供有關(guān)OS服務(wù)狀態(tài)的信息到調(diào)整任務(wù)調(diào)度等方方面面。同樣,能感知OS的調(diào)試器可在停止其它應(yīng)用或線程的同時(shí)允許其它應(yīng)用或線程的運(yùn)行。
審核編輯:湯梓紅
-
mcu
+關(guān)注
關(guān)注
146文章
17708瀏覽量
357936 -
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8480瀏覽量
148525 -
嵌入式
+關(guān)注
關(guān)注
5124文章
19434瀏覽量
312927 -
Linux
+關(guān)注
關(guān)注
87文章
11419瀏覽量
212279 -
RTOS
+關(guān)注
關(guān)注
24文章
837瀏覽量
120559
原文標(biāo)題:詳解選擇RTOS的要點(diǎn)
文章出處:【微信號(hào):EE時(shí)間,微信公眾號(hào):EE時(shí)間】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Android系統(tǒng)原理與開發(fā)要點(diǎn)詳解_培訓(xùn)課件
【畫板經(jīng)驗(yàn)】開關(guān)電源PCB排版基本要點(diǎn)詳解 18頁 1.5M
實(shí)時(shí)操作系統(tǒng)RTOS有什么要點(diǎn)?
該如何選擇RTOS?如何去使用RTOS呢?
選擇實(shí)時(shí)操作系統(tǒng)(RTOS)的要點(diǎn)詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論