 汽車ECU的內部構成與功能模塊
汽車ECU的內部構成與功能模塊
1. 常規功能模塊
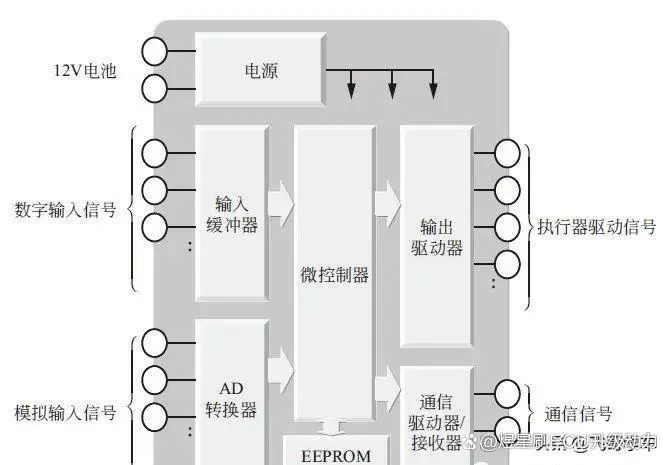
① 電源:向ECU內的各模塊提供穩定的電壓(5V、3V等),且與發動機艙的12V電池連接;也可用于AD轉換器的標準電壓,可實現較高精度。
② 輸入緩沖器:將數字輸入信號轉換為可輸入至微控制器的信號級(信號電平)。
③ AD轉換器:將模擬輸入信號轉換為可輸入至微控制器的數字值。
④ 微控制器:通過各種輸入信號算出控制量并輸出。
⑤ EEPROM:即帶電可擦可編程只讀存儲器(Electronically Erasableand Programmable Read Only Memory),即使發動機停止后電源不再供電,也能存儲應記憶數據的存儲器。
⑥ 輸出驅動器:依據微控制器的輸出信號,轉換為執行器可驅動的信號形態,或者增幅電壓。
⑦ 通信驅動器/接收器:通信驅動器是將微控制器的輸出數據轉換為滿足通信協議的通信信號;通信接收器是將其他ECU發送的信號轉換為可輸入至微控制器的信號級。
2. 輸入/輸出
ECU作為與外部通信的接口,為了通過微控制器運算實現符合實際狀態的最佳控制,需要檢測外部狀態的輸入手段及實際控制驅動的輸出手段。近年來為了滿足多種ECU之間密切協同控制,在ECU中還設置了通信手段。

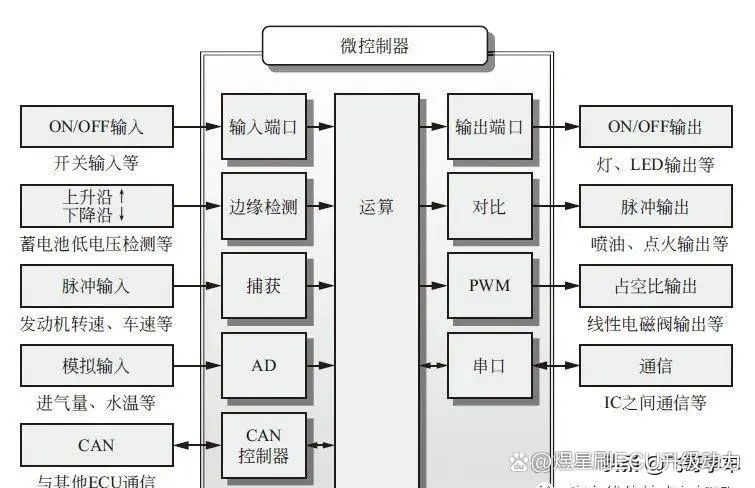
3. 微控制器
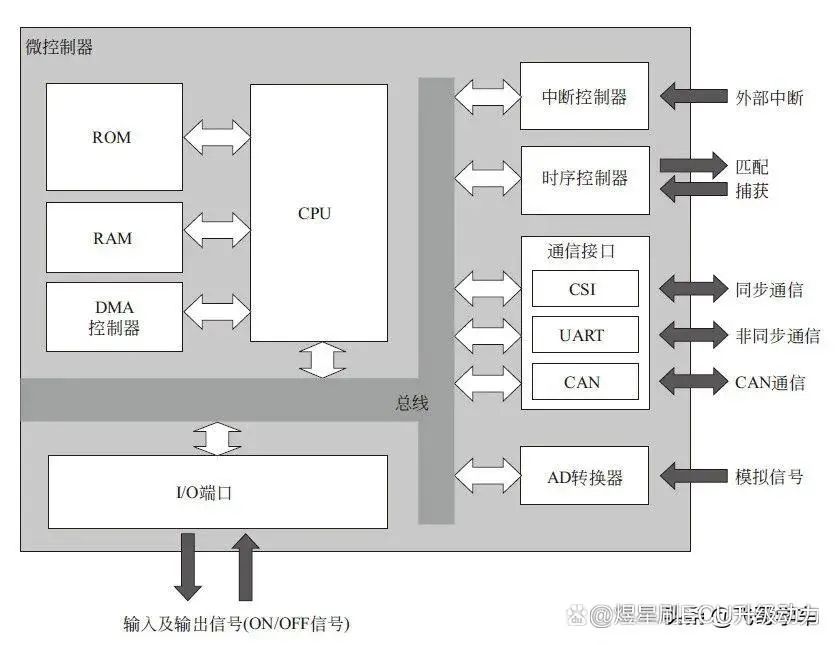
微控制器的基本構成
車載ECU中的微控制器雖然是用于車載,但其基本構成與普通的微控制器相同。
為了應對近年來的法規制度,ROM (ReadOnlyMemory,只讀存儲器)逐漸改變為閃存類型,可更改ROM內以模塊單位記憶的內容。
時序控制器是與時間及時刻相關的控制裝置。設定時刻與內部時序(計時器的數值)一致時,具有使既定輸出改變的匹配功能、記憶外部信號的邊緣輸入時刻的捕獲功能。匹配功能用于確定噴油信號輸出正時等。捕捉功能與中斷控制器配合,用于檢測發動機轉速信號輸出等。
通信接口是與ECU內部的輸入/輸出擴展IC及其他ECU進行通信的裝置。近年,為了應對車內LAN(LocalAreaNetwork,局域網),內置CAN功能的微控制器逐漸增多。
4.ECU及控制器的搭載位置
ECU根據在車輛內搭載的位置不同,其實際采用的形態也各種各樣。ECU的結構設計需要與其搭載環境相對應。
汽車剛開始電子化時,由于電子元件承受熱、濕度、振動等惡劣環境的能力較弱,所以將ECU搭載于環境條件較好的車室內。之后,隨著包括電路板在內的電子元件的可靠性及安裝技術的提升,ECU開始逐步搭載于環境條件較惡劣的發動機艙內,有些甚至直接安裝在發動機上。從設計層面考慮,ECU的硬件必須能夠適于安裝在車輛的任何位置,也就是“自由搭載”的概念。
審核編輯:湯梓紅
-
微控制器
+關注
關注
48文章
7552瀏覽量
151426 -
驅動器
+關注
關注
52文章
8236瀏覽量
146369 -
接收器
+關注
關注
14文章
2472瀏覽量
71913 -
存儲器
+關注
關注
38文章
7492瀏覽量
163842 -
ecu
+關注
關注
14文章
886瀏覽量
54504
原文標題:汽車ECU的內部構成與功能模塊
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文帶你全面了解汽車電腦ECU的內部構成、功能模塊
汽車電子控制單元ECU的設計
汽車電子功能模塊保護中“拋負載”及保護選型有什么技巧
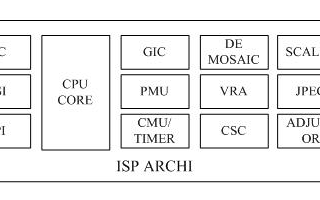
ISP的主要內部構成
SIMULINK功能模塊的處理
SIMULINK線的處理/SIMULINK自定義功能模塊
PDA功能模塊的設計

汽車電子控制單元ECU的IP核如何設計
AMT發動機V2 ECU的功能模塊
isp的主要內部構成包括哪些
汽車ECU的內部構成與功能模塊
汽車ECU的常規功能模塊





 工商網監
工商網監
評論