 KUKA機器人-基礎坐標系$BASE V4.18版
KUKA機器人-基礎坐標系$BASE V4.18版
基礎坐標
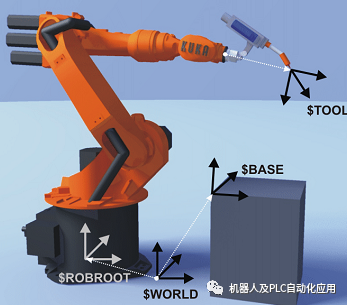
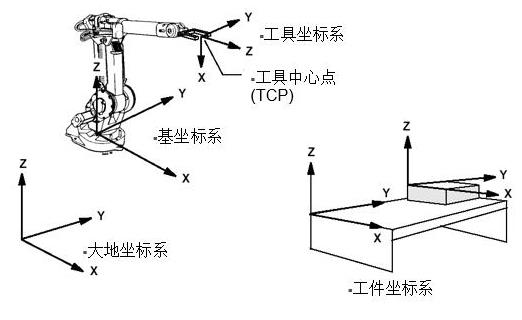
基礎坐標系是一個笛卡爾坐標系,用來說明工件的位置。它以世界坐標系為參照基準。
在默認配置中,基礎坐標系與世界坐標系是一致的。由用戶將其移入工件。
$BASE
預運行中的 BASE 坐標系
結構類型 FRAME 的變量定義了工件相對于 WORLD 坐標系的設定點位置。
X , Y , Z : 沿軸的原點偏移 [mm]
A , B , C : 軸角度的旋轉偏移 [°]
測量基準
在基準測量時,用戶分配給工作面或工件一個笛卡爾坐標系 (BASE 坐標系)。BASE 坐標系的原點為用戶指定的一個點。
基準測量的優點:
TCP 可以沿著工作面或工件的邊緣手動運行。
可以參照基坐標對這些點示教。如果必須移動基坐標,例如由于工作面被移動,這些點也隨之移動,但不必重新進行示教。
可以保存多少 BASE 坐標系取決于 WorkVisual 中的配置。默認:32 個 BASE坐標系。變量:BASE_DATA[1 … 32]。
有 2 種測量基坐標的方法:
3 點法
間接法
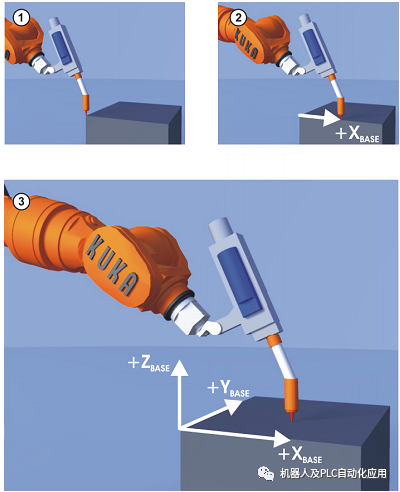
測定基坐標系。3 點法
移至新基礎坐標系的原點和其它 2 個點。這 3 個點定義了新的基礎系。
1. 選擇已經測量過的工具編號。用按鍵 繼續確認。
2. 用 TCP 駛至新基座的原點。點擊測量。點擊是確認安全詢問。
3. 將 TCP 移至新基座正向 X 軸上的一個點。點擊 測量。點擊是確認安全詢問。
4. 用 TCP 在 XY 平面上接近帶正 Y 值的一點。點擊 測量。點擊是確認安全詢問。
5. 在需要時,可以讓測量點的坐標和姿態以增量和角度顯示 (以法蘭坐標系為基準)。為此按下測量點。然后通過返回返回到上一個視圖。
6. 點擊 保存。
測定基坐標系。間接法
當無法移入基準原點時,例如,由于該點位于工件內部,或位于機器人作業空間之外時,須采用間接的方法。
此時須移至基準的 4 個點,其坐標值必須已知。機器人控制系統將以這些點為基礎對基準進行計算。
1. 選擇已經測量過的工具編號。用按鍵 繼續確認。
2. 輸入新基坐標系的一個已知點的坐標,并用 TCP 移至該點。點擊測量。點擊是確認安全詢問。
3. 把第4步重復三次。
4. 在需要時,可以讓測量點的坐標和姿態以增量和角度顯示 (以法蘭坐標系為基準)。為此按下測量點。然后通過返回返回到上一個視圖。
5. 點擊 保存。
輸入基準數值:已知下列數值,例如從 CAD 中獲得:基座的原點與世界坐標系原點的距離基座坐標軸相對于世界坐標系的旋轉運行方式 T1.
1. 在主菜單中選擇 投入運行 > 測量 > 基坐標 > 數字輸入。
2. 為待測定的基坐標系選擇一個號碼并給定一個名稱。用按鍵 繼續確認。
3. 輸入數據。用按鍵 繼續確認。
4. 點擊 保存。
應用:
$BASE=$pos_act 將當前坐標值作為BASE 坐標系.
$BASE=BASE_DATA[1] 將BASE_DATE[1]的坐標值作為當前BASE坐標值.
實際操作獲得BASE坐標:
工作臺基坐標系的測量步驟
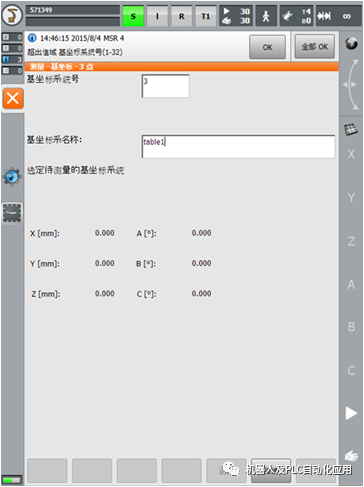
1)進入主菜單界面,依次選擇“投入運行”、“測量”、“基坐標”,選擇“3點法”。


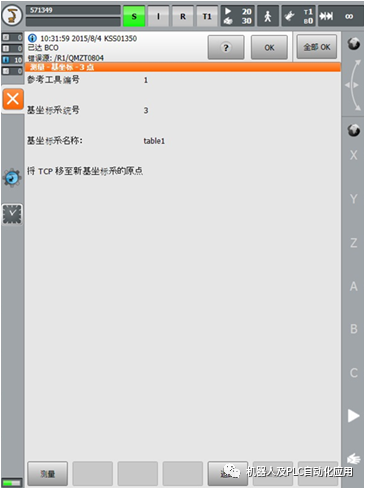
2)系統彈出基坐標編輯頁面,給基坐標編號為“3”,命名為“table1”,然后單擊“繼續按鈕”,進行下一步操作。
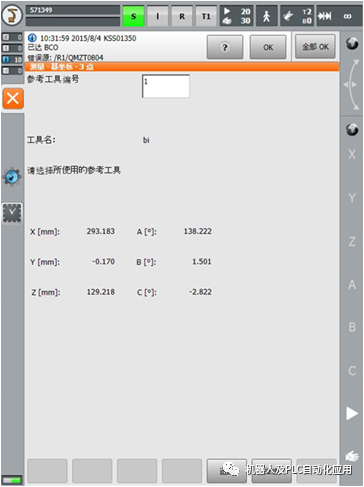
3)在彈出的參考工具頁面上選擇編號為“1”,名稱為“bi”的工具,然后“繼續”下一步。
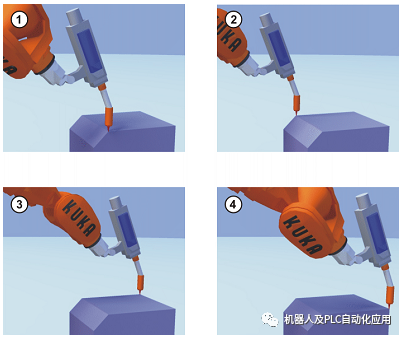
4)系統彈出提示:將TCP移至新基坐標系的原點。
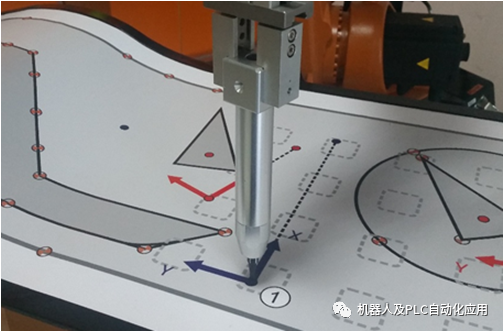
5)按照提示,將工具TCP移至工作臺原點,原點位置如右圖所示。
6)單擊“測量”按鈕,彈出選擇對話框,選擇“是”,確認采用當前位置。

7)系統出現提示:將TCP移至新基坐標系的X軸正方向上的一點。

8)按照系統提示,將工具TCP移至X軸正方向上一點,如左邊圖所示。
9)單擊“測量”按鈕,在彈出的對話框里選擇“是”,確認采用當前位置。

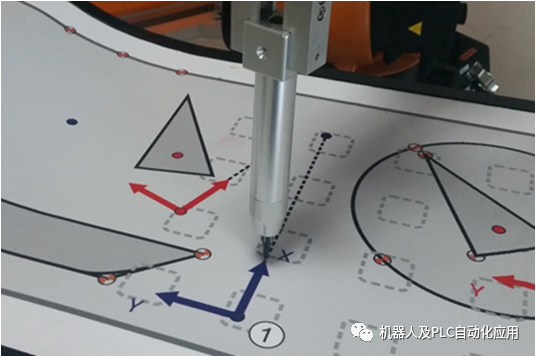
10)系統再次提示:將TCP移至新基坐標系XY平面上一個帶有正Y值的點。

11)按系統提示,將工具TCP移至工作臺+Y方向上一點,位置如左圖所示。
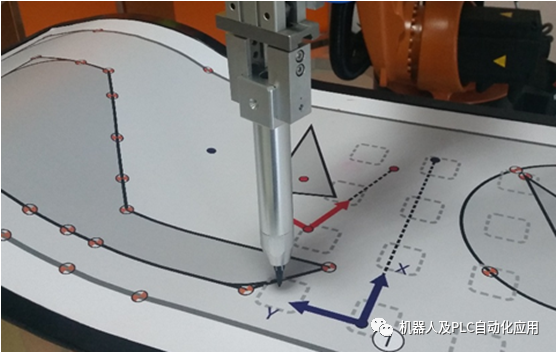
12)第三點確定之后,單擊“測量”按鈕,并選擇“是”以確認當前位置。

13)基坐標測量完成后,單擊“保存”按鈕,則數據被保存并采用。

-----------------END-------------------
審核編輯 :李倩
-
機器人
+關注
關注
211文章
28522瀏覽量
207531 -
測量
+關注
關注
10文章
4898瀏覽量
111494
原文標題:KUKA 機器人-基礎坐標系$BASE V4.18版
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
abb機器人工具坐標系問題
KUKA機器人問題解答
介紹坐標系和機器人之間的紐帶即連桿坐標系
機器人基坐標系標定方法研究
機器人4大坐標系講解
KUKA C4機器人的軌跡BASE與TOOL坐標
機器人坐標系用法和算法原理

機器人坐標系選擇指令和操作步驟

焊接機器人坐標系有哪幾種








 工商網監
工商網監
評論