

零漂移放大器:將好的(精度)與壞的(時域性能)結合起來 零漂移放大器,即實現連續自校正架構的放大器,由于其能夠實現高水平的直流精度而受到廣泛歡迎。雖然這種關注是當之無愧的,但這種卓越的精度有一個缺點,即放大器的時域性能。
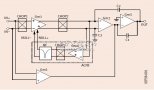
零漂移放大器的基本架構在深入研究這些零漂移放大器的時域方面之前,回顧一下其中許多器件中使用的基本架構是有益的。圖1提供了斬波穩定架構的高級視圖,例如Microchip的許多MCP6Vxx零漂移放大器上使用的架構。
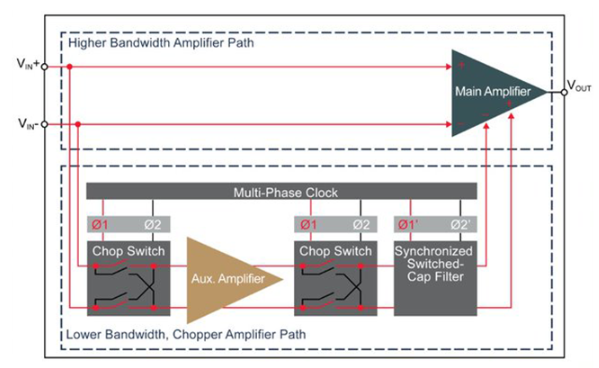
圖1.斬波器穩定架構。
斬波穩定放大器有兩個信號路徑,一個始終連接到主放大器的高帶寬路徑和一個較低帶寬的輔助路徑。主放大器專為高帶寬而設計,并決定整個放大器的指定增益帶寬乘積和壓擺率。輸入信號也通過輔助路徑路由,輔助路徑在輸入和輸出端都有斬波開關,然后是濾波器級,然后再添加回主放大器路徑。該次級路徑中的輔助放大器具有極高的增益,使其能夠校正從毫伏到微伏的失調。
架構如何影響時域性能 現在我們已經對這種架構有了基本的了解,讓我們探討一下它如何影響放大器的時域性能。我們首先考慮放大器輸入端的大規模階躍響應,如圖2所示。
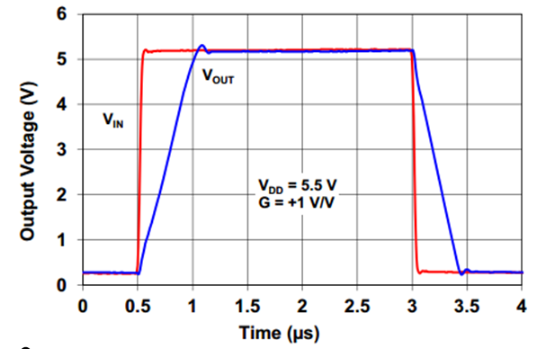
圖2.大規模階躍響應。
在本例中,輸入電壓(以紅色顯示)幾乎立即從大約200 mV步進至5.2V。單位增益放大器的輸出電壓(以藍色顯示)試圖匹配此階躍響應,但壓擺受限,輸出需要額外的時間才能穩定到其最終值。對于自我糾正架構來說,這是一個特別困難的情況。如前所述,零漂移放大器內的高帶寬信號路徑負責整體速度(增益帶寬和壓擺率)。但是,一旦達到階躍響應的新值,輸出必須穩定在零漂移放大器的失調下限值(通常小于50 μV)內。這涉及帶寬受限的輔助路徑,因此很大程度上是斬波頻率的函數。使用更高的時鐘頻率可以實現相對較快的建立時間,但對于零漂移放大器,這些時間通常在幾十微秒或更高。然而,較高的斬波頻率會導致最終校正失調電壓的增加,這通常是精密設計的首選。
零漂移放大器的另一個時域方面是啟動行為。當放大器第一次上電時,有一小段時間,放大器的輸出ifier將反映主放大器的未校正失調誤差(如上圖所示)。一旦電源電壓達到跳變點(由放大器上電復位電路定義),輔助校正路徑需要幾個時鐘周期,然后主放大器的輸出才能回到指定的失調電平內。通常,此啟動時間完全在放大器工作的整個系統的啟動時間內,因此不是問題。但是,如果放大器配置為高閉環增益,則放大器輸出端的瞬時未校正失調(可能高達±5 mV)可能導致放大器供電軌。在這種情況下,啟動時間還需要包括放大器返回其線性工作區域所需的時間。對于Microchip零漂移放大器,數據手冊中提供了該過驅恢復時間的典型值。
了解放大器架構如何影響時域性能有助于避免設計陷阱
現代零漂移設計一直在努力使這些時域權衡盡可能小,但系統設計人員仍然值得意識到這些潛在問題。延長的啟動時間和過驅恢復會影響系統內其他與時序相關的功能,例如模數轉換器對信號進行采樣的適當時間。通過了解這些潛在問題以及它們與這種獨特架構的關系,設計人員可以在初始設計中彌補這些問題,而不是在設計完成后跟蹤與時序相關的問題。
審核編輯:郭婷
-
放大器
+關注
關注
145文章
13971瀏覽量
215444 -
濾波器
+關注
關注
161文章
7963瀏覽量
180193 -
microchip
+關注
關注
52文章
1534瀏覽量
118498 -
零漂移放大器
+關注
關注
0文章
24瀏覽量
13812
發布評論請先 登錄
相關推薦
零漂移放大器特性概述
零漂移放大器的特性和優勢

零漂移放大器——非接觸式溫度測量的應用






 工商網監
工商網監

評論