 FOC之力矩控制模式
FOC之力矩控制模式
FOC又稱矢量控制,是通過控制變頻器輸出電壓的幅值和頻率控制三相直流無刷電機的一種變頻驅動控制方法。FOC的實質是運用坐標變換將三相靜止坐標系下的電機相電流轉換到相對于轉子磁極軸線靜止的旋轉坐標系上,通過控制旋轉坐標系下的矢量大小和方向達到控制電機目的。由于定子上的電壓量、電流量、電動勢等都是交流量,并都以同步轉速在空間上不斷旋轉,控制算法難以實現控制。通過坐標變換之后,旋轉同步矢量轉換成靜止矢量,電壓量和電流量均變為直流量。再根據轉矩公式,找出轉矩與旋轉坐標系上的被控制量之間關系,實時計算和控制轉矩所需的直流給定量,從而間接控制電機達到其性能。由于各直流量是虛構的,在物理上并沒有實際意義,因而還需通過逆變換變為實際的交流給定值。

1、測量電機運行時三相定子電流,可得到Ia、Ib、Ic。將三相電流通過 Clark 變換至兩相電流Iα和Iβ,其是相互正交的時變電流信號。
2、Iα和Iβ通過Park變換得到旋轉坐標系下的電流Id和Iq 。在電機達到穩定狀態時,Id和Iq 是常量。此時所使用的轉子位置為上一次迭代計算出來的角度值。
3、Id的參考值決定了電機轉子磁通量,Iq 的參考值決定了電機的轉矩輸出大小,二者各自的實際值與參考值進行比較得到的誤差,作為電流環 PI 控制器的輸入。通過PI控制計算輸出得到Vd和Vq, 即要施加到電機繞組上的電壓矢量。
4、有傳感器FOC根據Hall信號或者通過無感估算計算出轉子位置和電機轉速。新的轉子角度可告知 FOC算法下一個電壓矢量在何處。計算出的電機轉速將用于電機狀態的切換,環路切換,堵轉保護等子功能模塊的數據支持。
5、利用新的電機角度,Vd和Vq 經過 Park 逆變換到兩相靜止坐標系上。該計算將產生下一個正交電壓值 Vα、 Vβ。再采用 SVPWM 算法判定其合成的電壓矢量位于哪個扇區,計算出三相各橋臂開關管的導通時間。最后經過三相逆變器驅動模塊輸出電機所需的三相電壓。
電壓模式 - voltage
基于電壓的力矩控制是最基本的力矩控制模式,它為你提供了一個抽象的無刷直流電機,以便你可以控制它作為直流電機。
它基于簡單的歐姆定律(忽略了電流動態特性),因此不需要任何電流檢測相關的硬件。這種力矩控制方法無論其是否具有電流感應,都能夠在任何無刷直流電機驅動板上工作。
這種模式也就是我們知道的電機這種的模型
直流電流模式 - dc_current
基于直流電流的力矩控制能夠像控制直流電機那樣控制無刷電機。電流檢測用于獲取通過電機的電流大小及方向,我們假設力矩和總電流是成正比的。這種模式好處在于可以非常精確地控制無刷電機的實際電流,一些性能較低的處理器(如ATMega328系列)也能有較快較穩定的效果。
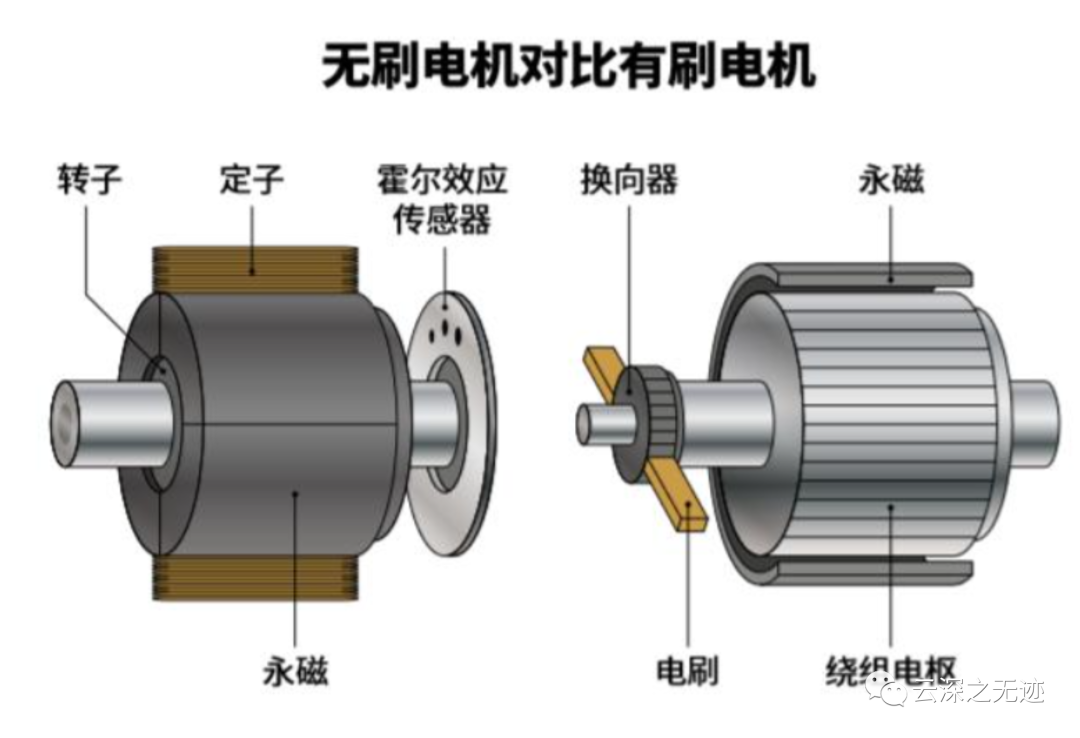
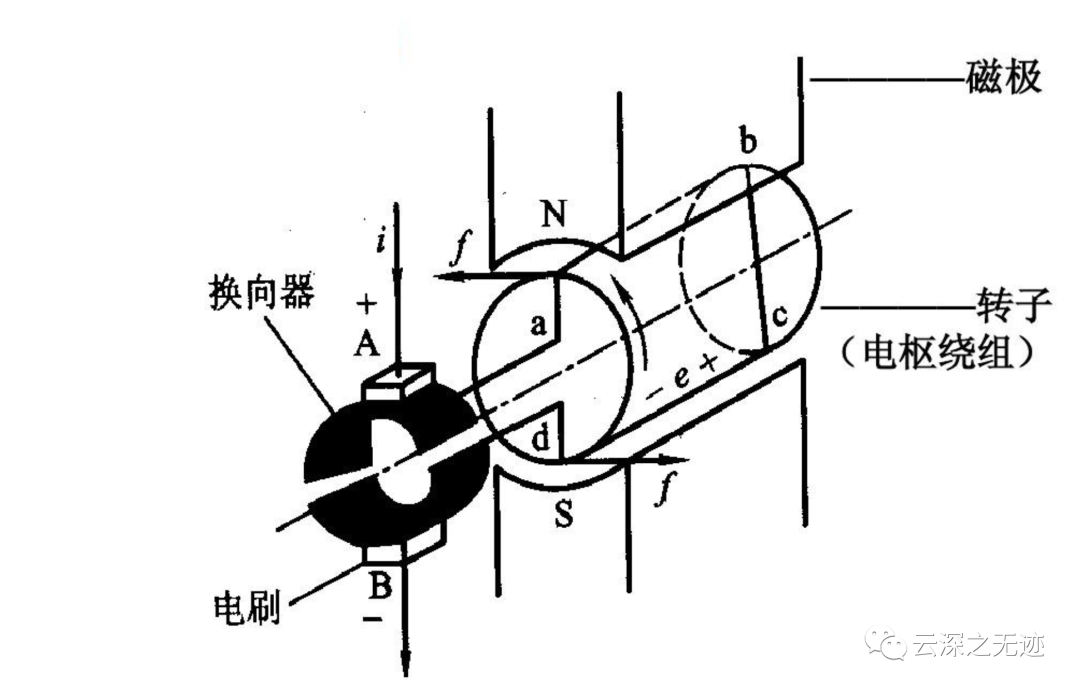
看左邊的無刷電機,就是沒有換向器這種東西
FOC電流模式- foc_current
基于直流電流的力矩控制是唯一真正的力矩控制方法。它控制電流 q 和 d的兩個分量。我們假設力矩與 q 電流分量成比例,并控制電流的 d 分量保持等于0。

關于三種的比較方式在這里

代碼在這里被設置

幾種配置的結構
基于電壓的控制
獲得轉的角度和現在給的電壓,算法給出三項電壓,FOC算法確保這些電壓產生的磁力恰好與電機轉子的永磁場偏移 90度 ,從而保證了最大力矩,這稱為換向。
假設電機產生的力矩與設定電壓 Uq 成正比,也就是說最大力矩與Uq 有關,而這個Uq 則受到供電電壓的限制。最小力矩當然即Uq = 0。
如果給出電機的相電阻的話,那直接給電流也是可以的:
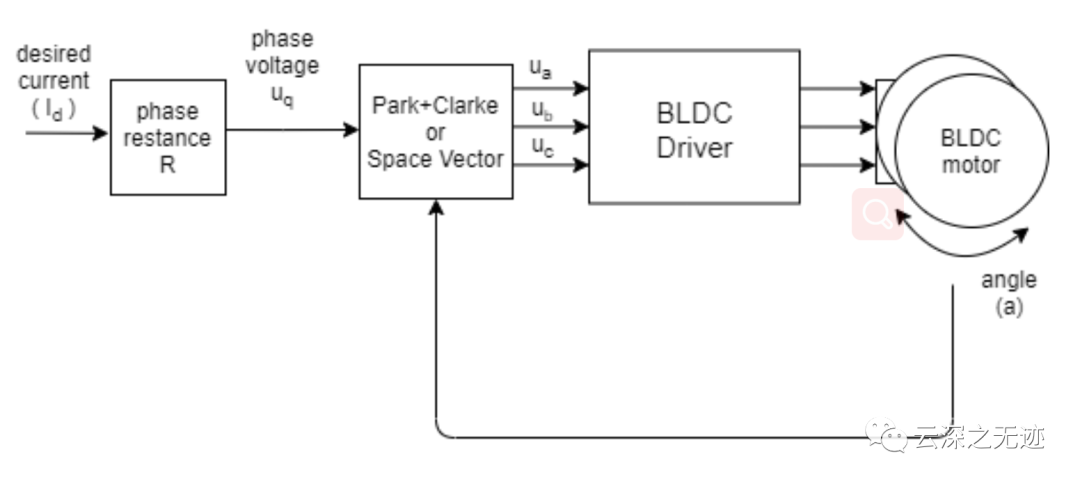
閉環的模型變成了這樣的
我們來看第二個,基于電流的控制
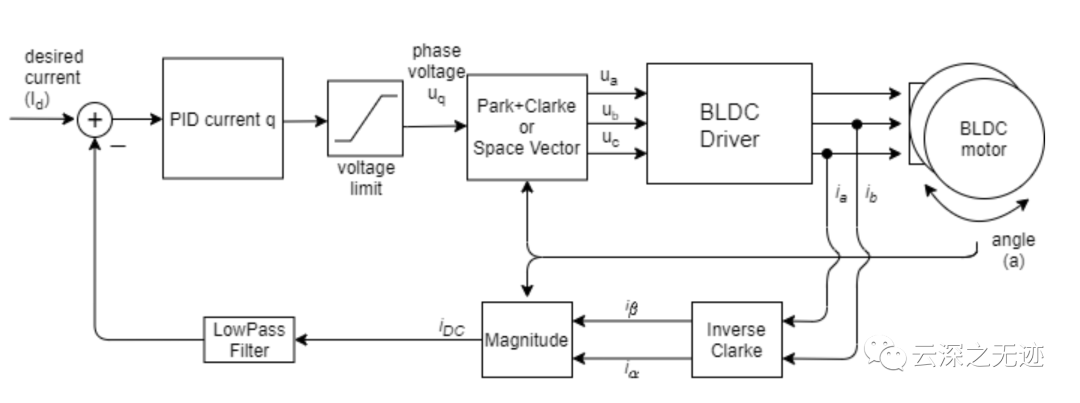
直流電流力矩控制算法讀取無刷直流電機的相電流(通常是ia 和 ib)。
該算法從位置傳感器讀取角度 a。相電流通過逆Clarke和簡化的Park變換轉換為直流電流iDC。
而后,PID控制器利用目標電流Id和測量電流iDC計算出相應的設置到電機的電壓值Uq,而Ud始終保持為0。
最后,FOC對電機設置相應的ua, ub 和 uc 。FOC會確保這些電壓產生的磁力恰好與電機轉子的永磁場保持90度偏移,從而保證了最大力矩,這稱為換向。
這種力矩控制模式是假設在電機的力矩是和電機的直流電流iDC成比例的(iDC=iq),因此可以通過控制電流來實現力矩的控制。但是這種假設僅限于低速的情況,在高速情況下,id分量會變得很高,致使iDC=iq就不成立了。
我們來看看FOC
FOC電流力矩控制算法讀取無刷直流電機(通常為ia 和 ib)的相電流。此外,該算法從位置傳感器讀取角度 a 。
相電流通過逆Clarke和Park變換轉換為 d 分量電流 id 和 q分量電流 iq 。而后,每個相PID控制器利用目標電流Id和測量電流值 iq 和 id計算出相應的設置到電機的電壓值Uq和Ud,以保持iq=Id,id=0。
最后,FOC利用Park和Clark(或空間矢量SpaceVector)變換設置合適的 ua, ub 和 uc 。
通過測量相電流,力矩控制算法能夠確保這些電壓生成在電機轉子中產生合適的電流和磁力,并恰好與電機轉子的永磁場保持90度偏移,從而保證最大轉矩,這稱為換向。電機產生的力矩與q分量的電流 iq成比例,這原理使這種力矩控制模式成為無刷直流電動真正的力矩控制。
簡單來說,voltage control mode是最簡單的接近電機力矩控制的方法。它基本在任何電機+驅動器+mcu的組合中運行。
DC current mode 是voltage control mode的更進一步,它比voltage control mode更精確,但需要電流傳感和更強大的mcu。
FOC current mode 是真正的電機力矩控制方法,不同于前兩者的“近似”,因此也需要電流傳感器,也比DC current mode對MCU的處理能力有更高的要求。
電壓模式直接給目標電壓,電流模式就是給的電流,其實和上面的模式比較就是一個相電阻的變化。
-
變頻器
+關注
關注
251文章
6574瀏覽量
145372 -
矢量控制
+關注
關注
2文章
285瀏覽量
32251 -
FOC
+關注
關注
20文章
324瀏覽量
42894
發布評論請先 登錄
相關推薦

基于FOC控制的雙電機力矩反饋控制系統
FOC的最簡理解
【求教】電機在高速的情況下如何從空轉IDLE切進FOC控制
【下載】基于STM32的永磁同步電機FOC控制理論基礎
深入淺出講解FOC算法與SVPWM技術
簡化BLDC馬達設計的FOC控制技術

力矩電機怎么控制轉速和力矩_力矩電機和伺服電機區別
BLDC電機控制算法——FOC介紹






 工商網監
工商網監
評論