") 機(jī)器視覺邊緣檢測相關(guān)算法的步驟
機(jī)器視覺邊緣檢測相關(guān)算法的步驟
1、濾波:邊緣檢測算法主要是基于圖像強(qiáng)度的一階和二階導(dǎo)數(shù),但導(dǎo)數(shù)的計算對噪聲很敏感,因此必須使用濾波器來改善與噪聲有關(guān)的邊緣檢測器的性能。需要指出,大多數(shù)濾波器在降低噪聲的同時也導(dǎo)致了邊緣強(qiáng)度的損失,因此,增強(qiáng)邊緣和降低噪聲之間需要折中。
2、增強(qiáng):增強(qiáng)邊緣的基礎(chǔ)是確定圖像各點(diǎn)鄰域強(qiáng)度的變化值。增強(qiáng)算法可以將鄰域(或局部)強(qiáng)度值有顯著變化的點(diǎn)突顯出來。邊緣增強(qiáng)一般是通過計算梯度幅值來完成的。
3、檢測:在圖像中有許多點(diǎn)的梯度幅值比較大,而這些點(diǎn)在特定的應(yīng)用領(lǐng)域中并不都是邊緣,所以應(yīng)該用某種方法來確定哪些點(diǎn)是邊緣點(diǎn)。最簡單的邊緣檢測判據(jù)是梯度幅值閾值判據(jù)。
4、定位:如果某一應(yīng)用場合要求確定邊緣位置,則邊緣的位置可在子像素分辨率上來估計,邊緣的方位也可以被估計出來。
邊緣檢測是機(jī)器視覺檢測技術(shù)的一種,在邊緣檢測算法中,前三個步驟用得十分普遍。這是因?yàn)榇蠖鄶?shù)場合下,僅僅需要邊緣檢測器指出邊緣出現(xiàn)在圖像某一像素點(diǎn)的附近,而沒有必要指出邊緣的精確位置或方向。
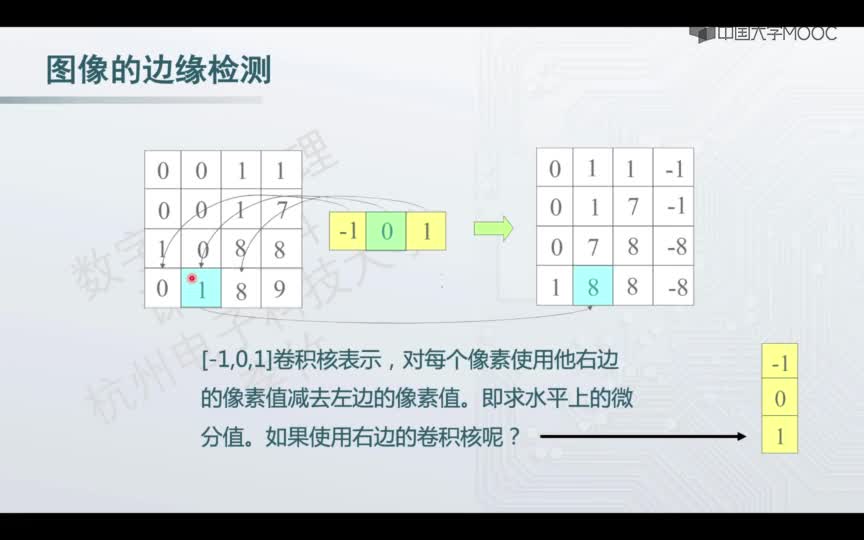
邊緣檢測的實(shí)質(zhì)是采用某種算法來提取出圖像中對象與背景問的交界線。我們將邊緣定義為圖像中灰度發(fā)生急劇變化的區(qū)域邊界。圖像灰度的變化情況可以用圖像灰度分布的梯度來反映,因此我們可以用局部圖像微分技術(shù)來獲得邊緣檢測算子。經(jīng)典的邊緣檢測方法,是通過對原始圖像中像素的某小鄰域構(gòu)造邊緣檢測算子來達(dá)到檢測邊緣這一目的的。
邊緣檢測是主要應(yīng)用有:檢測芯片針腳是否規(guī)則整齊、目標(biāo)定位以及存在/缺陷檢測等。基于邊緣檢測技術(shù)的應(yīng)用,為行業(yè)的高精度檢測及尺寸測量提供了強(qiáng)大的技術(shù)支持。
編輯:黃飛
-
濾波器
+關(guān)注
關(guān)注
161文章
7834瀏覽量
178257 -
算法
+關(guān)注
關(guān)注
23文章
4615瀏覽量
92990 -
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4378瀏覽量
120396 -
邊緣檢測
+關(guān)注
關(guān)注
0文章
92瀏覽量
18216
原文標(biāo)題:機(jī)器視覺邊緣檢測算法詳解
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論