 車載傳感器 — 一文詳解激光雷達
車載傳感器 — 一文詳解激光雷達
引言:激光雷達在自動駕駛應用中主要用來探測道路上的障礙物信息,把數據和信號傳遞給自動駕駛的大腦,再做出相應的駕駛動作,但室外常見的干擾因素如雨、霧、雪、粉塵、高低溫等對激光雷達的識別造成了極大的影響。因此,激光雷達投入實際應用前需要在雨、霧、光、塵等特殊環境中進行大量的測試。在自然環境條件下,所需要的測試場景可遇不可求且無法復現,無法滿足激光雷達大量真實環境測試的需求。在此基礎上,國家智能網聯汽車(長沙)測試區即將打造完成雨、霧、光、塵等典型測試場景,也是目前國內唯一同時具備雨、霧、光、塵等場景的測試區,可滿足激光雷達等傳感器大批量可復現的真實環境測試需求。(以下內容轉載自今日廣電,侵刪)

圖1激光雷達受環境的影響
激光雷達(LiDAR)是當前正在改變世界的傳感器,它廣泛應用于自動駕駛汽車、無人機、自主機器人、衛星、火箭等。激光通過測定傳感器發射器與目標物體之間的傳播距離(Time of Flight,TOF)(如圖2所示),分析目標物體表面的反射能量大小、反射波譜的幅度、頻率和相位等信息,輸出點云,從而呈現出目標物精確的三維結構信息。
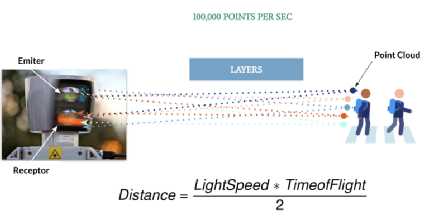
圖2激光雷達測距及點云
激光雷達是由激光發射單元和激光接收單元組成,發射單元的工作方式是向外發射激光束層,層數越多,精度也越高(如圖3所示),不過這也意味著傳感器尺寸越大。發射單元將激光發射出去后,當激光遇到障礙物會反射,從而被接收器接收,接收器根據每束激光發射和返回的時間,創建一組點云,高質量的激光雷達,每秒最多可以發出200多束激光。
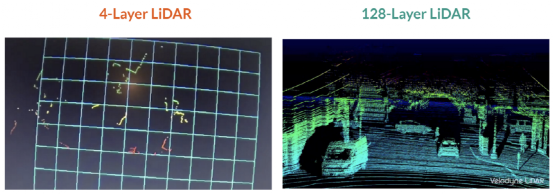
圖3 不同激光束形成的激光點云
對于激光的波長,目前主要使用使用波長為905nm和1550nm的激光發射器,波長為1550nm的光線不容易在人眼液體中傳輸。故1550nm可在保證安全的前提下大大提高發射功率。大功率能得到更遠的探測距離,長波長也能提高抗干擾能力。但是1550nm激光需使用InGaAs,目前量產困難。故當前更多使用Si材質量產905nm的LiDAR。通過限制功率和脈沖時間來保證安全性。
一、激光雷達的結構
激光雷達的關鍵部件按照信號處理的信號鏈包括控制硬件DSP(數字信號處理器)、激光驅動、激光發射發光二極管、發射光學鏡頭、接收光學鏡頭、APD(雪崩光學二極管)、TIA(可變跨導放大器)和探測器,如圖4所示。其中除了發射和接收光學鏡頭外,都是電子部件。隨著半導體技術的快速演進,性能逐步提升的同時成本迅速降低。但是光學組件和旋轉機械則占具了激光雷達的大部分成本。
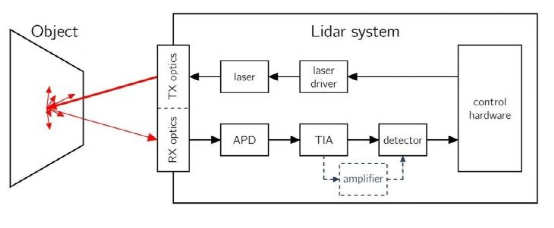
圖4 激光雷達的關鍵部件
二、激光雷達的種類
目前市面上有不同種類的激光雷達,按驅動方式可分為機械式、MEMS、相控陣、泛光面陣式(FLASH)。
機械式
以Velodyne 2007年推出的64線雷達為例。它把64個激光器垂直堆疊在一起,以20rpm速度旋轉。簡單理解就是通過旋轉將激光點變成線,通過64線堆疊將線轉化為面,得到點云數據獲取3D環境信息。
機械式結構需要復雜的機械結構,同時點云的測量又需要對安裝進行精確定位。考慮環境和老化的影響,平均的失效時間僅1000-3000小時,難以達到車廠最低13000小時的要求。且由于LiDAR安裝在車頂,民用領域需考慮外界養護的問題,如洗車的影響。因此機械式結構極大的限制了成本和應用推廣。
MEMS
MEMS激光雷達利用微電子機械系統的技術驅動旋鏡,反射激光束指向不同方向。
固態激光雷達的優點包括了:數據采集速度快,分辨率高,對于溫度和振動的適應性強;通過波束控制,探測點(點云)可以任意分布,例如在高速公路主要掃描前方遠處,對于側面稀疏掃描但并不完全忽略,在十字路口加強側面掃描。而只能勻速旋轉的機械式激光雷達是無法執行這種精細操作的。
典型應用有法雷奧SCALA激光雷達。目前應用在奧迪A8(第一款L3級的自動駕駛車輛)。安裝在前保險杠位置,使用MEMS技術得到145°的掃描角度,80m的探測距離。
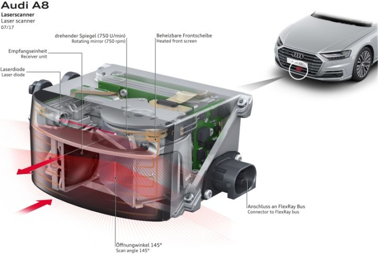
圖5 奧迪A8的激光雷達
相控陣(OPA)
光相控陣雷達原理:主要利用光的干涉原理。可以通過改變不同縫中入射光線的相位差即可改變光柵衍射后中央明紋(主瓣)的位置,如下圖所示。
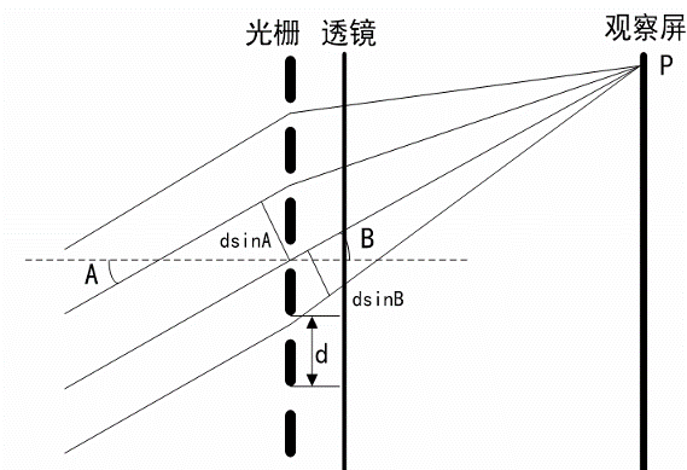
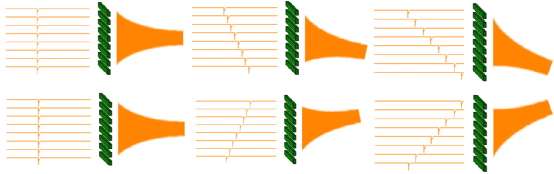
圖6 相控陣雷達的原理
相控陣(OPA)的優缺點
優點:
①結構簡單、尺寸小:由于不需要旋轉部件,可以大大壓縮雷達的結構和尺寸,提高使用壽命,并降低成本。
②標定簡單:機械式激光雷達由于光學結構固定,適配不同車輛往往需要精密調節其位置和角度,固態激光雷達可以通過軟件進行調節,大大降低了標定的難度。
③掃描速度快:不用受制于機械旋轉的速度和精度,光學相控陣的掃描速度取決于所用材料的電子學特性,一般都可以達到MHz量級。
④掃描精度高:光學相控陣的掃描精度取決于控制電信號的精度,可以達到千分之一度量級以上。
⑤可控性好:光學相控陣的光束指向完全由電信號控制,在允許的角度范圍內可以做到任意指向,可以在重點區域進行高密度的掃描。
⑥多目標監控:一個相控陣面可以分割為多個小模塊,每個模塊分開控制即可同時鎖定監控多個目標。
缺點:
①掃描角度有限:調節相位最多只能讓中央明紋改變約±60°,實際做到360°采集的話一般需要6個。
②旁瓣問題:光柵衍射除了中央明紋外還會形成其他明紋,這一問題會讓激光在最大功率方向以外形成旁瓣,分散激光的能量。
③加工難度高:光學相控陣要求陣列單元尺寸必須不大于半個波長,一般目前激光雷達的工作波長均在1微米左右,故陣列單元的尺寸必須不大于500nm。而且陣列密度越高,能量也越集中,這都提高了對加工精度的要求,需要一定的技術突破。
④接收面大、信噪比差:傳統機械雷達只需要很小的接收窗口,但固態激光雷達卻需要一整個接收面,因此會引入較多的環境光噪聲,增加了掃描解析的難度。
泛光面陣式(FLASH)
泛光面陣式的原理類似TOF相機,也就是快閃,它不像MEMS或OPA的方案會去進行掃描,而是短時間直接發射出一大片覆蓋探測區域的激光,再以高度靈敏的接收器,來完成對環境周圍圖像的繪制。它運行起來更像攝像頭。激光束會直接向各個方向漫射,因此只要一次快閃就能照亮整個場景。隨后,系統會利用微型傳感器陣列采集不同方向反射回來的激光束。
圖7 泛光式激光雷達
Flash LiDAR 的一大優勢是它能快速記錄整個場景,避免了掃描過程中目標或激光雷達移動帶來的各種麻煩。當前的發展方向有2個,一種是蓋格模式APD的單光子計數型直接對光子計數生成數字圖像;一種是傳統的CMOS光強模擬采集得到強度圖,將強度圖轉化為距離信息。
三、激光雷達的數據傳輸
LiDAR由于數據量較大,當前的控制架構中,基本采用將每個光點的原始數據發回到中央控制器處理,所以通常會采用FlexRay或以太網此類高帶寬的網絡進行通訊。如法雷奧的SCALA在1代采用Flexray,2代則開始使用以太網。
LiDAR 通常從硬件層面支持授時,通常會提供支持三種時間同步接口。
1) IEEE 15882008同步,遵循精確時間協議,通過以太網對測量以及系統控制實現精確的時鐘同步。
2) 脈沖同步(PPS),脈沖同步通過同步信號線實現數據同步。
3) GPS同步(PPS+UTC),通過同步信號線和UTC時間(GPS時間)實現數據同步。
以目前最普遍的旋轉式激光雷達的數據為例,其數據為10hz,即LiDAR在0.1s時間內轉一圈,并將硬件得到的數據按照不同角度切成不同的packet,而每一個packet包含了當前扇區所有點的數據,包含每個點的時間戳,每個點的xyz數據,每個點的發射強度,每個點來自的激光發射機的id等信息。而如最新的Livox Horizon激光雷達,也包含了多回波信息及噪點信息。
審核編輯 :李倩
-
數據傳輸
+關注
關注
9文章
1976瀏覽量
65037 -
激光雷達
+關注
關注
970文章
4068瀏覽量
190959 -
TOF
+關注
關注
9文章
487瀏覽量
36694 -
相控陣
+關注
關注
3文章
91瀏覽量
14259 -
車載傳感器
+關注
關注
0文章
47瀏覽量
4421
原文標題:汽車前沿技術 | 車載傳感器 — 一文詳解激光雷達
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
比起全面的車載激光雷達,工業激光雷達更加專一

常見激光雷達種類
激光雷達面臨的機遇與挑戰
消費級激光雷達的起航
固態設計激光雷達
一文詳解激光雷達核心指標,實用性和可靠性第一
最佳防護——激光雷達與安防監控解決方案
【北醒TFmini-S 測距/避障激光雷達傳感器免費試用連載】基于北醒TFmini-S 測距/避障激光雷達傳感器關鍵地區人員靠近防撞提醒裝置
【北醒TFmini-S 測距/避障激光雷達傳感器試用連載】——上位機測試
如何設計一款適合于果園應用的激光雷達
無人機激光雷達傳感器技術
激光雷達傳感器Alpha Prime有什么創新
一文詳解激光雷達







 工商網監
工商網監
評論