 往年 | 大疆雷達算法校招筆試題目解析
往年 | 大疆雷達算法校招筆試題目解析
本文首發于公眾號【調皮連續波】,其他平臺為自動同步,內容若不全或亂碼,請前往公眾號閱讀。保持關注調皮哥,和1.5W雷達er一起學習雷達技術!
| 序號 | 類別 | 內容 | 文件路徑 |
|---|---|---|---|
| 1 | 無 | 無 | 無 |
【正文】
編輯|小助理 審核|調皮哥
本文圖片中的答案僅僅是為了說明題目,并不是正確答案,額外注意!文中的解析僅作為學習參考。
1、FFT主要利用旋轉因子的什么性質,減少運算量?
答:對稱性和周期性
2、采樣率fs,采樣M個實數,進行N點(補零為2的整數次冪)FFT變換,其頻率分辨率、最大可觀測頻率是多少?
答:實采樣(雙邊譜)的最大可觀測頻率是采樣率的一半(fs/2),N點FFT的頻率分辨率是fs/N。
3、實際FFT計算時一般要對數據進行加窗,窗函數的作用是?
答:降低頻譜泄露。
點評:上面這三個題目可以說時雷達參數估計的基本題目了,需要注意。
4、當采用圓極化天線接收極化電磁波時,一般會有多少損失?
答:使用圓極化天線接收線極化損耗只有3db。
5、將N次測量回波進行非相干積累,其SNR提高多少倍?
答:N次樣本的相干(相參)積累將SNR提高了N倍,得到了積累增益。積累的好處不言而喻,高的SNR對信號處理中的檢測和參數估計的幫助是十分重要的,但是有得必有失,N個脈沖需要更多的時間,能量和更大的運算代價。
對于非相干積累,由于這種積累只利用到了信號的部分信息,也就是幅度信息,所以效率是比相干積累低的。
雷達專家Marcum和Swerling指出,非相干積累的增益值在和M之間,當M很大時,積累增益接近。本題答案是D。非相干積累的效率要比相干積累低,可以看作是犧牲增益換取的。
6、關于概率數據關聯算法PDA說法錯誤的是?
答:PDA算法是一種用于雜波環境中單目標跟蹤(屬于特殊的多目標跟蹤)的算法,另外還有個算法叫JPDA,適用于真正意義上的多目標。
PDA的思想是認為只要是存在于關聯門內的有效觀測值,就有可能源于目標,只是每個有效觀測值源于目標的概率不同。通過大量的相關計算給出每個有效觀測值的概率加權系數,計算所有有效觀測值的加權和作為真實目標觀測值的估計,從而在卡爾曼濾波中更新目標狀態。概率數據關聯算法是一種次優濾波方法,它只對最新的量測進行分解。
PDA方法計算量小,但是稍微大于卡爾曼是對的。而PDA對所有的目標和量測進行排列組合,從中選出合理的聯合事件來計算聯合概率,是錯的,這JDPA算法的步驟。
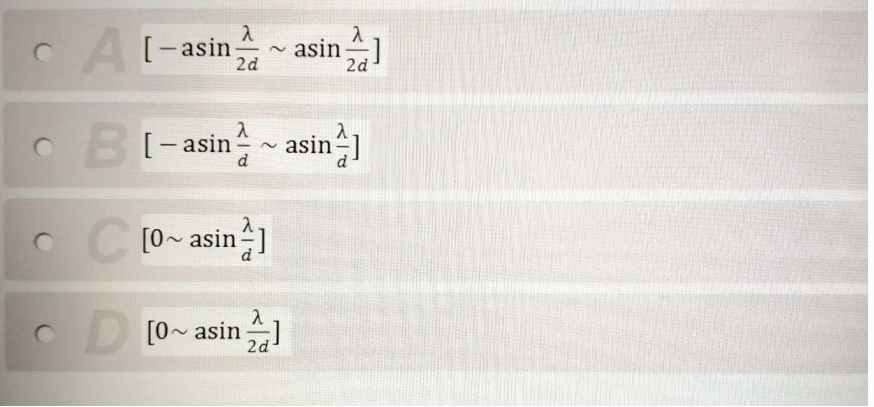
7、雷達采用單脈沖比相法測角,如圖1所示,以下最大測角范圍正確的是?
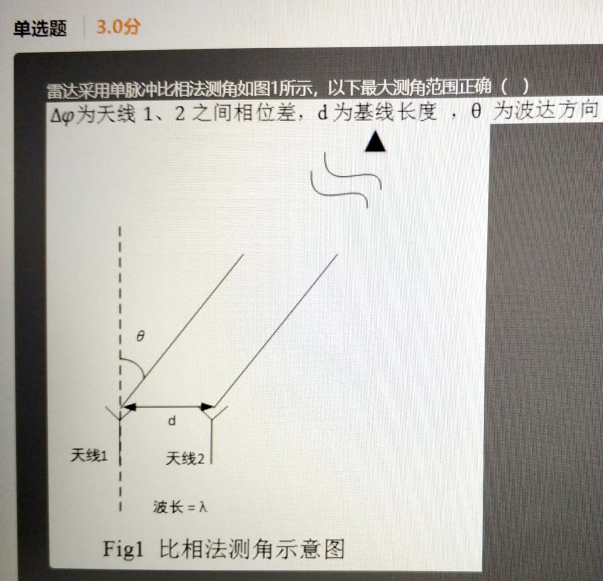
答:模型圖如下,假設兩天線之間的距離d,遠遠小于目標到振源的距離,則可以認為到達接收點的目標所反射的電磁波近似為平面波。目標到 A、B兩點的距離相等,回波到 A,B 兩點的相位也相等。
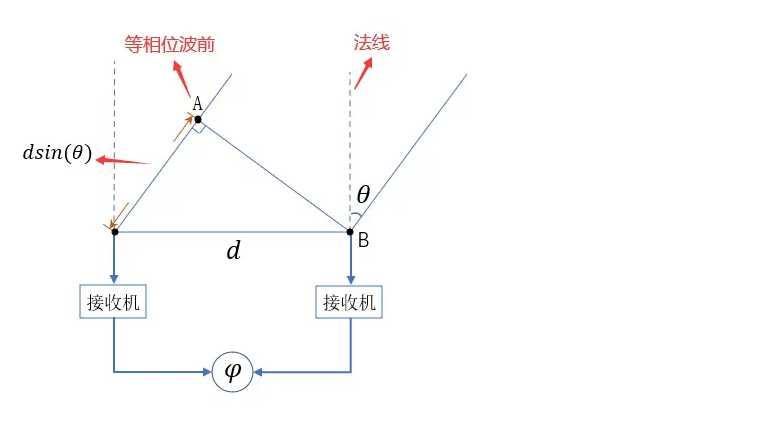
回波到接收點的波程差,對應相位差假設為,一個波長對應相位差為,則波程差對應的相位差為:
所以,如果用相位計進行比相,測出其相位差,就可以計算目標角度。
該值為相對于法線的夾角,需要根據的符號確定到底在雷達法線的左側還是右側,因此當時,不存在角度模糊,對應的角度取值范圍就是,帶入得到:
因此角度范圍在之間。
8、如題7圖所示,關于比相測角最大測角范圍說法正確的是?
答:根據公式即可得到答案,雷達最大測角范圍與基線長度d相關。
9、不考慮別的因素,波長越短會使雷達作用距離如何,角度分辨率如何?
答:根據雷達方程來看,如下所示,波長越短,其實作用距離會越短,這就是為什么毫米波雷達不適合遠距離通信和探測的根本原因,更深層次的原因的因為電磁波的大氣衰減。
根據雷達的角度分辨率的計算公式,如下所示:
可知,波長越短,角度分辨率越高,這就是為什么要從24G跨越到77G的根本原因之一。
10、關于卡爾曼濾波下列說法錯誤的是?
答:原始卡爾曼濾波算法(KF)、擴展卡爾曼濾波算法(EKF)以及無跡卡爾曼濾波算法(UKF)三者的關系如下:
聯系:三者都是貝葉斯濾波的高斯濾波,即采用高斯分布逼近了貝葉斯濾波中預測步和更新步中所用到的某些概率分布,從而達到可以進行近似計算的目的,KF是EKF和UKF思想的基礎,EKF和UKF是KF在非線性情形下的近似實現方式。
區別:KF針對于線性高斯的情況,EKF針對于非線性高斯,其是將非線性部分進行一階泰勒展開,因此忽略了高階項,誤差較大。UKF是將UT變換與KF結合的產物,它的基礎理念是接近一個非線性函數的概率分布非接近其本身更簡單。后兩種卡爾曼是針對同一問題的不同思路的解決方案,其實UKF的能力已經跳出了非線性高斯的范圍,其也可以解決非高斯問題,只不過在這方面PF能做的更好,運算量也更大。
所以答案是C。
11、關于FFT補零,說法正確的是?
答:影響DFT(FFT)分辨率最本質的物理機制在于DFT的積累時間,分辨率為積累時間Ts的倒數,這點從下面的數學公式上可以很容易得到:
所以在滿足奈奎斯特定理前提下,補零并不會提高頻率分辨率,這從信息論的角度來講,補零并沒有增加任何有用信息,而增加積累時間可以增加有用的信息。其實換做雷達信號處理中的距離估計,FFT補零并不會提高距離分辨率,理論距離分辨率僅和發射信號有效帶寬有關。
用MATLAB做FFT并不要求數據點個數必須為以2為基數的整數次方。之所以很多資料上說控制數據點數為以2為基數的整數次方,是因為這樣就能采用以2為基的FFT算法,提升運算性能。
補零對原數據起到了做插值的作用,克服“欄柵”效應,使譜的外觀平滑。另外,由于對數據截短時引起的頻譜泄漏,有可能在頻譜中出現一些難以確認的譜峰,補零后有可能消除這種現象。
最后,補零確實可以提高頻率的估計精度,具體可以參考這個鏈接:https://ww2.mathworks.cn/help/signal/ug/amplitude-estimation-and-zero-padding.html
11、關于卡爾曼濾波器發散原因描述正確的是?
答:造成卡爾曼濾波發散的原因無外乎以下兩點:
(1)狀態方程描述的動力學模型不準確,或者噪聲的統計模型不準確,這樣會使模型和量測值不匹配,導致發散。
(2)遞推過程計算機攝入誤差累積,使得方差陣失去正定性或者失去對稱性,導致增益計算失去加權效果,從而導致濾波器發散。
所以選擇D。
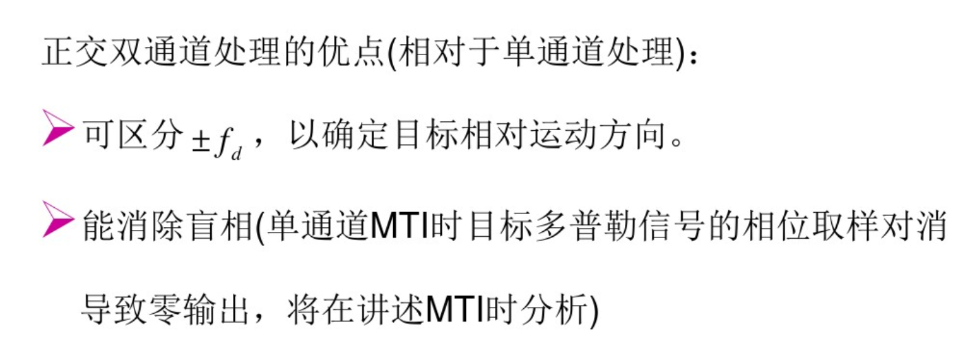
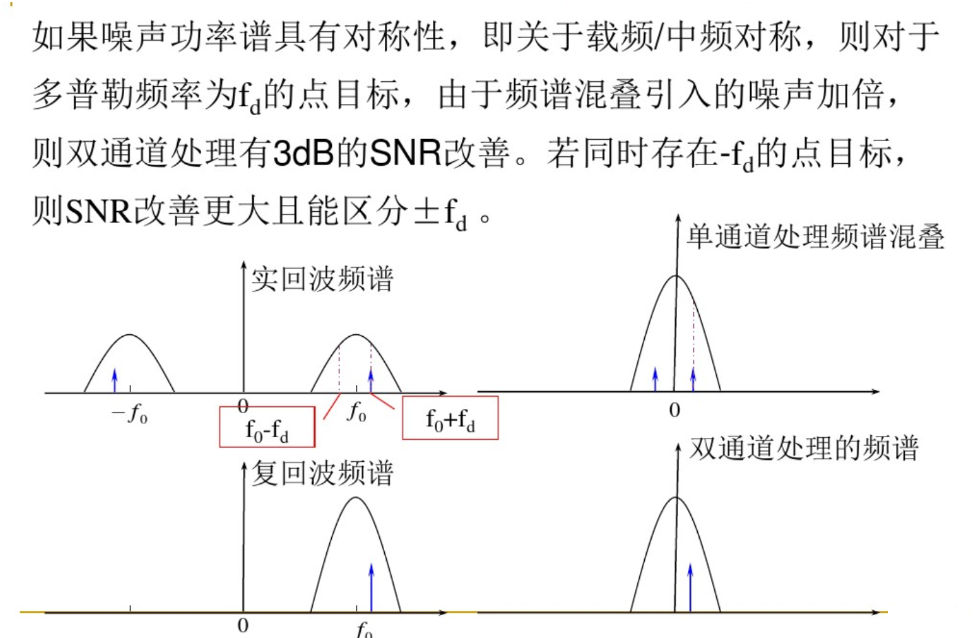
12、IQ正交雙通道處理(相對于單通道)增益?
答:
13、雷達測角原理主要利用以下的什么特性?
答:AB。
14、常見的電磁波極化方式有?
答:極化,就是指波振動的平面,電磁波的傳播是由相互垂直的電場和磁場產生的。因此存在電場和磁場兩個相互垂直的振蕩平面,所以定義電場的振蕩平面為電磁波的極化:即空間固定點,電場E隨時間變化的方式。按照電場E的變化方式,可以將平面電磁波的極化分為三種:線極化,圓極化和橢圓極化。
15、MUSIC算法估計角度,不需要知道信源數先驗信息?
答:MUSIC算法需要精確已知信號個數,這樣它才能劃分信號和噪聲子空間。
16、在采樣長度一致的情況下,提高采樣率并不能提高頻率分辨率?
答:根據采樣定理,采樣數據長度若不變,采樣點數N增加倍數與采樣頻率fs增加倍數是相同的,故不能增加計算上和物理上的頻率分辨力。
17、卡爾曼濾波可以處理多維非平穩隨機的隨機過程?
答:卡爾曼提出的遞推最優估計理論,采用狀態空間描述法,在算法采用遞推形式,卡爾曼濾波能處理多維和非平穩的隨機過程。
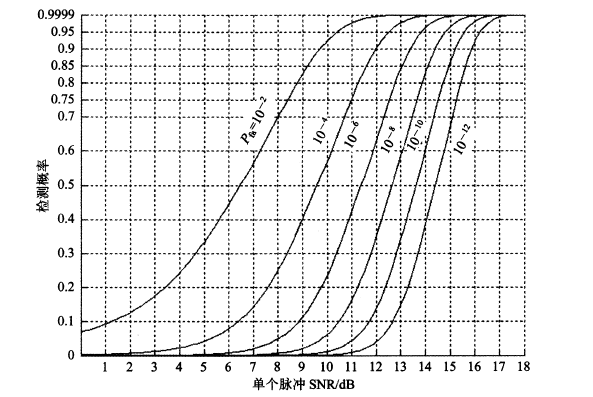
18、當虛警率一定時,要提高發現概率,只能提高SNR?
答:看圖,當虛警率一定時,要提高發現概率,只能提高SNR。
19、FMCW體制雷達中,要提高距離分辨率,通過提高頻率分辨率即可?
答:雷達的理論距離分辨率只和發射信號有效帶寬有關,提高頻率分辨率是通過增加采樣時間,但增加采樣時間并不一定就是增加了發射信號有效帶寬。
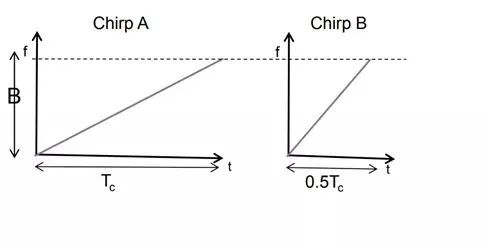
所以只要雷達的帶寬一樣,無論信號持續的時間、信號的調頻斜率如何都不會影響到雷達的距離分辨率。下圖所示的兩種調頻斜率,其距離分辨率是一致的。
20、在雷達接收機中,接收機前端對噪聲系數的影響最大?
答:對。
雷達接收機的射頻前端主要進行的是濾波、放大、頻率轉換等信號處理,而固有噪聲存在于整個接收機前端系統,從而對接收的雷達信號產生影響,降低了輸入射頻信號的信噪比。而噪聲系數(NF)就是對這種影響的度量。所有接收機的靈敏度都受到熱噪聲的限制,而在雷達中,主要是來自接收機的熱噪聲(而不是外部噪聲源)
21、IQ正交雙通道比單通道平均有3dB SNR改善?
答:對,這也就是為什么采用復基帶架構的根本原因。
(推薦必讀)為什么FMCW毫米波雷達系統中要使用復基帶架構?
22、FFT估計頻率,要提高頻率分辨率,提高采樣率即可?
答:錯。提高時域分辨率得提高采樣頻率,提高頻域分辨率得增長采樣時間,二者都想提高的話,就得提高采樣頻率的同時,增長采樣時間,FFT的點數就相應增加了,運算復雜度也會增加。
23、ADC采樣率提高一倍,采樣率平均有3dB SNR改善?
答:這個問題是過采樣提高量化信噪比的問題,增加采樣率確實可以使得信號的量化信噪比提升,公式為:
不過這個噪聲是ADC量化噪聲,并不是雷達系統本身信噪比,請注意區分。
24、ADC轉換位數增加1位,平均有3dB的改善?
答:每增加一倍的采樣頻率,就會提高信噪比3dB,相當于提高了ADC 個bit,當然這也是ADC量化噪聲,而不是雷達系統本身的噪聲。
由于篇幅關系,這個題目還有兩道解答大題留在下一篇文章分析,敬請關注。
【本期結束】
本文不涉及任何利益,都是空閑時候的個人心得和體會,僅供參考。目前我的工作經驗尚淺,還有很多內容需要學習,如果還有沒有說到或者不全面的地方,還請指正,感謝大家。
喜歡本文,可以轉發朋友圈。歡迎關注【調皮連續波】和備用號【跳頻連續波】
。
審核編輯黃宇
-
算法
+關注
關注
23文章
4626瀏覽量
93153 -
雷達
+關注
關注
50文章
2960瀏覽量
117804
發布評論請先 登錄
相關推薦
C語言筆試題
【面試題】人工智能工程師高頻面試題匯總:機器學習深化篇(題目+答案)

人工智能工程師高頻面試題匯總——機器學習篇
激光雷達在SLAM算法中的應用綜述

AIGC算法解析及其發展趨勢
大疆給無人機裝上了激光雷達

康謀技術 | 毫米波雷達技術解析

從校招新星到前端技術專家的成長之路
開放原子校源行Meetup | 湖南兩校共啟OpenHarmony技術實習實訓!

基于毫米波雷達的手勢識別算法
一汽與大疆簽署戰略協議,推進智能駕駛深度合作
軟件算法賦能4D雷達性能提升

激光雷達成“考古神器”!大疆禪思L2發現南陽古城遺址

曝:比亞迪投資華為車BU遭拒?傳轉投大疆,拋棄激光雷達轉國內第一套純視覺智駕?






 工商網監
工商網監
評論