 雷達校招 | 往年雷達算法校招筆試題分析
雷達校招 | 往年雷達算法校招筆試題分析
本文首發于公眾號【調皮連續波】,其他平臺為自動同步,內容若不全或亂碼,請前往公眾號閱讀。保持關注調皮哥,和1.4W雷達er一起學習雷達技術!
2023年度會員內容更新公告(04.10)
| 序號 | 類別 | 內容 | 文件路徑 |
|---|---|---|---|
| 1 | 雷達工具 |
雷達工具箱 MATLAB源碼 |
根目錄雷達工具箱 |
【正文】
編輯|小助理 審核|調皮哥
1、2016年5月美國佛羅里達州發生的特斯拉自動駕駛第一起命案,當時Models行駛在一條雙向、有中央隔離帶的公路上,自動駕駛處于開啟模式,此時一輛拖掛車以與Models垂直的方向穿越公路
由于拖掛車正在橫穿公路,且車身較高,這一特殊情況導致Models從掛車底部通過時,其前擋風玻璃與掛車底部發生撞擊從而發生事故,據悉特斯拉的自動駕駛系統安裝有77GHZ毫米波雷達系統,關于毫米波雷達在此次自動駕駛事故中失效的原因解釋你認為正確的是
A. 橫向拖掛車的雷達特征與路牌類似,雷達誤以為是路牌
B. 白色拖掛車缺乏紋理特征雷達沒法檢測
C. 雷達安裝位置過低雷達波束從下側穿過卡車,導致漏檢
D. 橫向穿越的拖掛車其徑向速度為零,雷達無法檢測靜止的目標
解析:目前這款雷達是傳統的毫米波雷達,特點是只有距離、速度和水平角度信息,沒有高度信息。
A、B答案不符合雷達檢測道路障礙物的邏輯,顏色對雷達檢測不敏感。即使沒有高度信息,只要在雷達前方有目標就屬于障礙物,此時的雷達還不具備目標識別功能。
C答案不完全對,雷達波束確實會穿過卡車底部,但俯仰維度還是存在一定的波束寬度,況且汽車是金屬,不可能完全沒有電磁波反射。
D答案在目前看來也是不完全對的,但是放在2016年的77G雷達可以認為是對的。因為卡車是垂直Model Y方向行駛,如果同時行駛速度又很慢的話,因為缺乏徑向多普勒分量,雷達的識別算法很容易將其當成靜態目標過濾掉。
當前的4D成像雷達,不僅存在高度信息,而且采用點云成像思路,即使橫向目標運動緩慢,也會在距離維度(橫向運動的汽車其本身的徑向距離也是變化的)、微多普勒維度上體現。
2、關于信號處理中窗函數的影響,以下說法錯誤的是
A. 會使得旁瓣變低
B. 會提升多目標的分辨力
C. 會使得主瓣展寬
D. 切比雪夫(chebwin)加窗會使得旁瓣相等
解析:加窗會使得旁瓣降低,這是毋庸置疑的。能量守恒定律,旁瓣降低主瓣頻譜就會展寬,展寬頻譜也就意味著頻譜分辨率下降,因此對于多目標的分辨力下降。在給定旁瓣高度下,Chebyshev窗的主瓣寬度最小,具有等波動性,也就是說,其所有的旁瓣都具有相等的高度。
3、在雜波背景中進行目標檢測時,為了提高目標檢測性能,可以
A. 提高信號采樣率
B. 提高發射功率
C. 提高信號帶寬
D. 提高角度分辨率
E. 提高脈沖重復頻率
F. 增加積累時間
G. 提高信號時寬
解析:雷達的基本理論,這里顯然是只考慮雜波或者雜波占主要成分的場景。雜波是不需要的目標(海雜波、地雜波、雨雪冰包雜波等),噪聲是不需要的信號成分,干擾是受到了其他電磁信號的干擾。
如果雜波返回功率大于系統噪聲功率,則雷達受雜波限制,信雜比必須等于或大于最小信噪比才能檢測到目標,信雜比定義公式:
其中,是脈沖持續時間,是光速,是目標距離,是水平角波束寬度,是俯仰角波束寬度,是雷達橫截面積,是反向散射系數。信雜比提高需要窄脈沖和窄波束寬度,窄脈沖可以等效為高帶寬,窄波束寬度可以等效為高角度分辨率。
A提高信號采樣率是不行的,因為采樣率過高反而會混入高頻噪聲,尤其是高頻非平穩噪聲,反而會影響目標檢測。一般滿足工程上一般采樣率滿足2~5倍信號的最高頻率即可,不需要太高。
雜波的功率有可能比目標還高,甚至淹沒弱小目標。B單純提高發射功率,雜波的功率也會提高,水漲船高。
C提高信號帶寬可以提高距離分辨率,距離分辨率越高,目標之間的差異越容易被發現,檢測概率更高,同時否定了G。
D提高角度分辨率,同C,也是為了提高目標與雜波之間的差異,同時符合信雜比公式。
E提高脈沖重復頻率,也就是降低脈沖重復周期,也就是提高最大不模糊速度,目標速度越大,越容易與雜波區分,當速度小于速度分辨率,則一定不能被檢測出來。所以,為了盡可能地提高檢測概率,必須同時在雜波抑制和2D-FFT中對距離維和速度維進行高分辨率處理。
F增加積累時間,比如多個脈沖對消可以抑制雜波(如MTI),同時也能改善速度分辨率,彌補E選項的不足。
參考論文:一種基于FMCW雷達的慢速目標檢測自適應濾波器 (rhhz.net)
從FMCW毫米波雷達系統的性能參數理解4D成像毫米波雷達的設計思路
本問題讀者如果存在疑問,歡迎提出,答案僅作參考。
4、關于提升雷達作用距離以下說法正確的是
A. 增大天線增益
B. 提升雷達的發射功率
C. 增大雷達帶寬
D. 增加雷達脈沖數目
解析:根據雷達方程,A可以,B也可以,C單純增加帶寬對提升雷達作用距離沒有用。D增加雷達脈沖數目可以增加脈沖積累的時間Tmeas=NTc,換句話說就是脈沖積累。
5、MUSIC算法稱為多信號分類算法(Multiple Signal classification)。MUSIC算法的基本思想是將輸出數據的協方差矩陣進行特征分解,從而得到與信號分量相對應的信號子空間和信號分量相正交的噪聲子空間,然后利用這兩個子空間的正交性來估計信號的入射方向,以下對于MUSIC算法的描述錯誤的是:
A. 該算法可以突破瑞麗限的要求實現高分辨率,高精度
B. 該算法對于天線陣列形狀有要求,必須是等間距陣列
C. 該算法要求入射信號是不相干的
D. 信號子空間對應于較小的特征值,噪聲空間對于較大的特征值
解析:MUSIC算法基本原理。MUSIC算法經常用在稀布陣上,不一定等間距MUSIC算法推導過程中就是假設信源相互獨立,噪聲服從高斯分布,且與信源信號相互獨立噪聲子空間對應較小的特征值,信號子空間對應較大的特征值。
6、關于DBF的角度分辨率以下說法正確的是
A. 與波長有關,波長越短角度分辨率越高
B. 陣列長度有關,陣列長度越長角度分辨率越高
C. 與陣元個數有關,陣元個數越多角度分辨率越高
D. 各方向能達到的角度分辨率是相同的
E. 與陣元間距有關,陣元間距越大角度分辨率越高
解析:DBF和FFT測角效果一致,如文章雷達算法 | 車載毫米波雷達DOA估計綜述(附MATLAB算法仿真)
故ABCE的說法是對的,如下公式:
雷達的角分辨率與雷達的波長成反比,與天線的直徑或者叫孔徑成正比,就是說波長越長,分辨率越低,孔徑越大,分辨率越高。
理論上,角分辨力由陣列主波束3dB寬帶決定。
7、在噪聲背景中進行目標檢測時,為了提高目標檢測性能,可以
A. 提高信號采樣率
B. 提高發射功率
C. 提高信號帶寬
D. 提高角度分辨率
E. 提高脈沖重復頻率
F. 增加積累時間
G. 提高信號時寬
解析:煙霧彈題,和前面那個雜波背景下容易搞懵,這個時候不要慌,要去分析雜波和噪聲的定義、特征、區別,以及從理論出發驗證,都是紙腦虎。
兩個思路:提高信噪比和加強目標信號。
A不行,上面分析過了。B可以,因為提高發射功率從雷達方程角度講,可以提高信噪比,如下所示:
C可以提高距離分辨,D提高角度分辨,都是有利于目標檢測的。E可以提高最大不模糊速度,同時也會提高雷達的平均功率,在相同時間內照射目標的脈沖數更多,可以通過積累改善信噪比。
F可以通過脈沖積累提高信噪比。G增加信號時間寬度,反而會在接收機中增加噪聲能量。
8、關于卡爾曼濾波器,以下說法正確的是
A. 卡爾曼濾波器給出了協方差矩陣的準確測量,能夠更好的實現波門的關聯處理
B. 卡爾曼濾波器增益的動態計算意味著該濾波器可以用于多種機動目標環境
C. 卡爾曼濾波器的增益不會根據檢測歷史而自適應的改變
D. 卡爾曼濾波器使得部分補償誤相關和誤關聯的影響成為了可能
解析:卡爾曼濾波分為三個步驟,即預測、實測和修正。答案為:ABD。
9、請給出如下所述信號的信號表達式或近似表達式
1)雷達發射線性調頻信號,該信號帶寬為B,脈沖寬度為t,載頻為fc;
2)上述發射信號從距離為R處目標反射的回波信號:
3)若有N個接收陣元,各陣元可距為d,一目標位于距離為R,角度為a的位置(與陣列法線夾角),請給出該目標回波經過解調后各陣元基帶回波的信號形式:
4)在2)中的回波信號與發射信號差頻后的信號的近似表達式。
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
10、已知雷達發射信號時寬為T,帶寬為B,信號重復周期為T,采樣率為fs,波長為入,積累周期數為N。
1)若上述雷達為LFMCW雷達體制,給出該雷達的最大不模糊距離、距離分辨率,測速范圍以及速度分辨率;
2)若該雷達為脈沖多普勒體制,給出該雷達的最大不模糊距離、距離分辨率、測速范圍以及速度分辨率;
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
11、已知雷達發射信號頻譜為X(f),時寬為T,帶寬為B,采樣率為fs,載頻為fc,請給出距離為R的目標回波信號頻譜以及該回波信號經過匹配濾波后的頻譜。
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
12、已知場景中無相對運動物體,雷達一個周期的回波為X(t),頻譜為X(f),信號周期為T,波長為入,一共接收N個周期的回波信號。
1)對N個接收的回波信號進行慢時間的N點FFT,請給出零多普勒通道信號的時域表達式及其頻譜
2)若對N個接收的回波信號進行慢時間2N點的FFT,請給出零多普勒通道信號的時域表達式及其頻譜
3)若信號周期調整為2T,接收N個回波信號并進行慢時間的N點FFT,請給出零多普勒通道信號的時域表達式及其頻譜
解析:見鏈接https://zhuanlan.zhihu.com/p/510398532
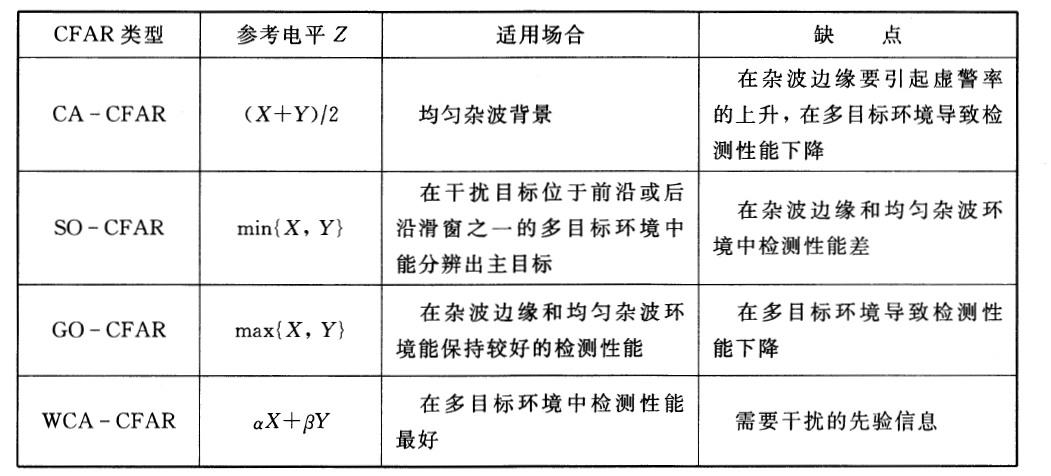
13、 目前雷達目標檢測中常用的檢測算法有單元平均恒虛警(CA-CFAR),有序統計量恒虛警(OS-CFAR)以及最大最小恒虛警(SO/GO-CFAR),試說明以上幾種算法的優劣。
CA-CFAR 計算邏輯簡單,算法復雜度低,在工程中被廣泛應用。但是 CA-CFAR 只在均勻環境中性能表現優秀,在多目標及雜波邊緣環境中無法消除臨近目標與空域雜波能量突變對算法檢測性能的影響, 因而檢測概率損失嚴重、虛警概率偏離預設值。
GO-CFAR可以有效應對雜波邊緣環境中能量突變的影響,但是在多目標環境的應用中檢測概率損失嚴重,性能惡化。
SO-CFAR可以有效地解決多目標環境中臨近目標對于算法性能的影響, 在多目標環境的應用中性能表現優異,但是在應對雜波邊緣環 境時, 該算法的虛警概率惡化嚴重。
OS-CFAR在多目標與雜波邊緣環境中檢測性能較好,但是在均勻環境中檢測性能有一定損失。
這里推薦看《現代雷達系統分析與設計》一書:
【本期結束】
本文不涉及任何利益,都是空閑時候的個人心得和體會,僅供參考。目前我的工作經驗尚淺,還有很多內容需要學習,如果還有沒有說到或者不全面的地方,還請指正,感謝大家。
審核編輯黃宇
-
雷達
+關注
關注
50文章
2949瀏覽量
117674
發布評論請先 登錄
相關推薦
請問DAC8760校零怎么給輸出加負值?
定華雷達儀表學堂:雷達液位計的導波管的使用注意事項
相控陣雷達電源芯片詳解
汽車雷達回波發生器的技術原理和應用場景
激光雷達在SLAM算法中的應用綜述

分析DCDC4644電源芯片在F-35戰機相控陣雷達的應用
光學雷達和激光雷達的區別是什么
從校招新星到前端技術專家的成長之路
開放原子校源行Meetup | 湖南兩校共啟OpenHarmony技術實習實訓!

定華雷達知識講堂:雷達液位計有哪些使用技巧
基于毫米波雷達的手勢識別算法
軟件算法賦能4D雷達性能提升

雷達檢測概率曲線的影響因素
生命體征監測雷達模組
中央域控雷達:4D雷達新時代






 工商網監
工商網監
評論