 使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 創建逼真的機器人模擬
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 創建逼真的機器人模擬
MoveIt 是一個機器人控制平臺,包括了運動規劃、操縱、3D 感知、運動學、控制和導航方面的最新技術。PickNik Robotics 是進行 MoveIt 開發的公司,該公司正在探索在內部研發項目中使用 NVIDIA Isaac Sim。項目的目標是提高對操縱的感知,并通過 PickNik 的商業機器人開發平臺 MoveIt Studio 讓機器人具有更自主的行為。
本文展示了將 MoveIt 2 與 NVIDIA Isaac Sim 中模擬的機器人進行集成的過程。本教程需要一臺安裝了 Isaac Sim 2022.2.0 的電腦,以及如下所列的系統配置。請參閱 NVIDIA Isaac Sim documentation (https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/overview.html)了解具體的安裝細節和要求。
1、NVIDIA Isaac Sim 2022.2.0 安裝于 Ubuntu 20.04 主機上。默認位置為$HOME/.local/share/ov/pkg/isaac_sim-2022.2.0目錄。
2、安裝 Docker。
3、克隆 MoveIt2 教程,以構建一個基于 Ubuntu 22.04 Humble 的 Docker 鏡像,該鏡像可以與 Isaac Sim 通信并運行本教程。
ros2 _ control 介紹
要執行 MoveIt 計算的軌跡,建議使用 ros2_control 框架進行管理并與您的機器人通信(無論真實的還是模擬的)。這種方法為開發人員提供了一個通用的 API,使軟件能夠通過簡單地更改一些啟動參數,在許多不同的機器人類型和內置傳感器之間切換。
例如,Panda 機器人ros2_control.xacro使用標志use_fake_hardware在被模擬或連接到物理機器人之間切換,如下所示:
if value="${use_fake_hardware}">
mock_components/GenericSystem
if>
"${use_fake_hardware}">
franka_hardware/FrankaHardwareInterface
"robot_ip">${robot_ip}
硬件元件可以是不同類型的。插件mock_components/GenericSystem是一個簡單的系統,用于轉發輸入的 command_interface 要跟蹤的節點值 state_interface。該系統模擬了對節點的完美控制。
為了將機器人的配置擴展到 Isaac Sim ,首先需要引入 topic_based_ros2_control。此硬件接口是一個訂閱和發布已配置主題的系統。對于本教程,topic /isaac_joint_states 將包含機器人的當前狀態,并且 將使用 /isaac_joint_commands 進行驅動 。
本教程中使用的 moveit_resources_panda_moveit_config 不支持連接到硬件。因此當標志 ros2_control_hardware_type 設置為 isaac 時,表示ros2_control.xacro已更新并裝載 TopicBasedSystem 插件。
if value="${ros2_control_hardware_type == 'mock_components'}">
mock_components/GenericSystem
if>
if value="${ros2_control_hardware_type == 'isaac'}">
topic_based_ros2_control/TopicBasedSystem
"joint_commands_topic">/isaac_joint_commands
"joint_states_topic">/isaac_joint_states
if>
包含的 Python 腳本加載 Panda 機器人,同時構建 OmniGraph 發布和訂閱用于控制機器人的 ROS topic。要了解有關配置 Isaac Sim 機器人與 ROS 2 通信的信息,請參閱ROS 2 Joint Control: Extension Python Scripting
(https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/tutorial_ros2_manipulation.html)。
計算機設置
按照以下步驟設置計算機。
1、使用 Workstation Installation documentation 安裝 Isaac Sim.
2、使用以下腳本執行 MoveIt2 教程存儲庫的淺克隆:
git clone https://github.com/ros-planning/moveit2_tutorials.git -b humble --depth 1
3、打開克隆教程的文件夾,然后切換到以下目錄:
cd moveit2_tutorials/doc/how_to_guides/isaac_panda
4、構建 Docker 鏡像:
docker compose build
使用模擬組件運行
MoveIt Interactive Marker Demo
運行以下腳本以測試 mock_components/GenericSystem 硬件接口:
docker compose up demo_mock_components
RViz 將運行 Panda 機器人,并使用 mock_components 以模擬機器人并執行軌跡。如果這是您第一次同時使用 MoveIt 與 RViz ,請參閱Quickstart in RViz 教程(https://moveit.picknik.ai/humble/doc/tutorials/quickstart_in_rviz/quickstart_in_rviz_tutorial.html)。
完成測試后,在終端中選擇 Ctrl+C 停止容器。
使用 Isaac Sim 運行
MoveIt Interactive Marker Demo
1、在主機上,導航到教程啟動目錄:
cd moveit2_tutorials/doc/how_to_guides/isaac_panda/launch
2、加載預配置的 Panda 機器人以使用本教程。請注意,此步驟假定 Isaac Sim 安裝在 $HOME/.local/share/ov/pkg/isaac_sim-2022.2.0" 目錄。
此步驟需要幾分鐘的時間來下載資源并設置 Isaac Sim。耐心等待,不要點擊 Force Quit 模擬器啟動時彈出的對話框。要加載 Panda 機器人,請運行以下命令:
./python.sh isaac_moveit.py
3、從moveit2_tutorials/doc/how_to_guides/isaac_panda 目錄,啟動一個連接到 Isaac Sim 的容器,使用 topic_based_ros2_control/TopicBasedSystem 硬件接口:
docker compose up demo_isaac
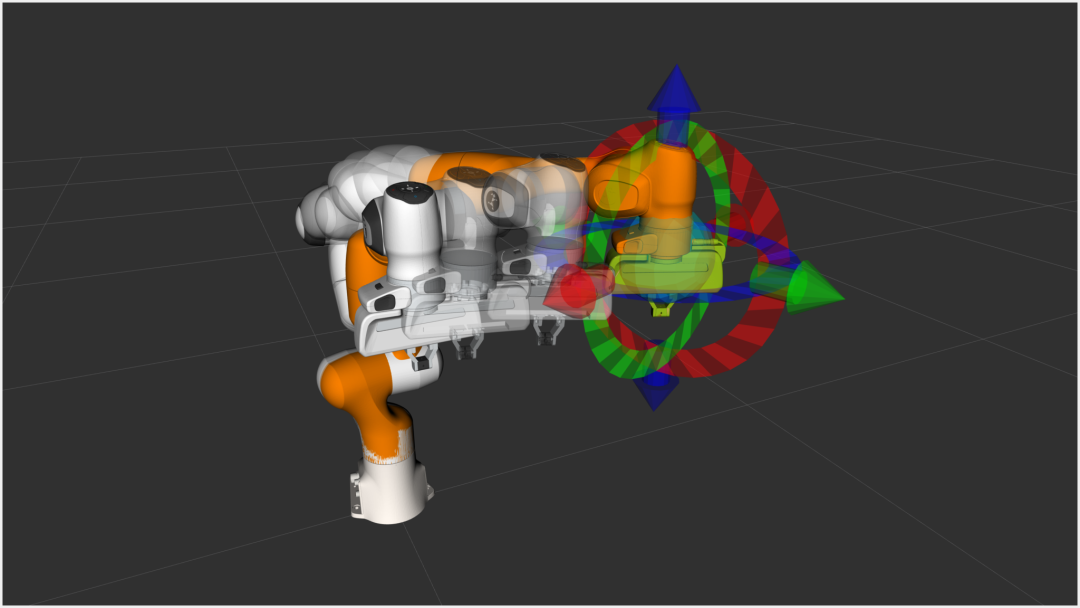
RViz 將運行 Panda 機器人,然后使用 TopicBasedSystem 用于與模擬機器人通信并執行軌跡的接口。
視頻 1:了解如何集成 MoveIt 和 NVIDIA Isaac Sim
結論
將 MoveIt 與 NVIDIA Isaac Sim 集成,開發人員能夠創建反映真實世界的復雜逼真的機器人系統模擬。通過將這兩個框架與 ros2 _ control 配對,您可以在不同的模擬器和真實硬件之間快速切換,以快速迭代新算法和機器人行為。
即刻點擊“閱讀原文”,在 NVIDIA On-Demand 上觀看 GTC 精選回放,包括主題演講相關精選、中國本地精選內容、生成式 AI 專題以及全球各行業及領域最新成果!
原文標題:使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 創建逼真的機器人模擬
文章出處:【微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉載請注明出處。
-
英偉達
+關注
關注
22文章
3815瀏覽量
91489
發布評論請先 登錄
相關推薦
NVIDIA發布Isaac GR00T Blueprint,加速人形機器人開發
NVIDIA發布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?

物理仿真人形機器人的統一全身控制策略

堅米智能借助NVIDIA Isaac Lab加速四足機器人開發
NVIDIA通過加速AWS上的機器人仿真推進物理AI的發展
NVIDIA助力Figure發布新一代對話式人形機器人
NVIDIA與學術研究人員聯合開發手術機器人
NVIDIA 加速人形機器人發展

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
逐際動力攜手英偉達Isaac平臺, 助力通用機器人研發
NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進的仿真技術,加速 AI 機器人技術的發展

全球機器人開發領域采用NVIDIA 機器人開發和生產
使用NVIDIA Isaac Manipulator生成抓取姿勢和機器人運動

NVIDIA Isaac機器人平臺升級,加速AI機器人技術革新
NVIDIA入局人形機器人!Isaac平臺迎來重要更新






 工商網監
工商網監
評論