") 一文詳解HUD基礎(chǔ)知識
一文詳解HUD基礎(chǔ)知識
01
HUD技術(shù)起源
抬頭顯示系統(tǒng)HUD(Head-up display)是一項(xiàng)從反射器瞄準(zhǔn)器中演變而來的技術(shù),二戰(zhàn)前用在槍械瞄具和戰(zhàn)斗機(jī)瞄具上。二戰(zhàn)之后,HUD技術(shù)開始逐步應(yīng)用到戰(zhàn)斗機(jī)上,可將速度、高度、雷達(dá)信息、瞄準(zhǔn)器等顯示在戰(zhàn)斗機(jī)的座艙罩或透明板上,飛行員不必低頭,即可看到所需要的重要信息。
到了現(xiàn)代,戰(zhàn)斗機(jī)上的HUD逐漸被頭盔式顯示器(HMDS)取代。
到了上世紀(jì)八十年代,通用汽車收購了航天和國防制造公司Hughes Aircraft,之后HUD技術(shù)開始在汽車上出現(xiàn)。1988年,通用汽車在Oldsmobile Cutlass Supreme Indy 500 Pace Car上應(yīng)用了HUD,是世界上首款采用HUD技術(shù)的汽車。最初的汽車HUD系統(tǒng)顯示的信息有限并且顏色單一。
自此之后,HUD系統(tǒng)開始逐漸裝備在跑車和高檔轎車中,且其技術(shù)開始朝著信息化、數(shù)字化的方向發(fā)展
02
HUD技術(shù)的意義
1. 提升駕駛安全性
正常駕駛時(shí),人眼需要在道路和儀表之間來回切換,容易導(dǎo)致視覺疲勞和注意力分散。一項(xiàng)美國的研究表明,假設(shè)車輛行駛速度是120km/h,如果駕駛者的視線偏離路面2秒以上,車輛會行駛超過65m的距離。
HUD技術(shù)的最大意義就是可以讓駕駛者不用將視線從路面上挪開就能獲取大量的信息:駕駛員查看HUD上的信息,需要低頭5°~10°,而查看組合儀表需要低頭20°~25°。
2.提升人機(jī)交互體驗(yàn)
除了提升駕駛安全性外,HUD技術(shù)還可進(jìn)一步提升人機(jī)交互體驗(yàn)。一方面,HUD可讓車況、智能駕駛等信息的顯示更為高效;另一方面,HUD還可大幅增強(qiáng)導(dǎo)航的顯示效果,使二維導(dǎo)航邁向?qū)嵕皩?dǎo)航。
隨著人們對駕駛安全意識的不斷增強(qiáng),科學(xué)技術(shù)的不斷發(fā)展,HUD系統(tǒng)會不斷普及到中低檔汽車中,讓普通人也能享受到科技帶來的安全享受。
03
HUD的分類
汽車HUD主要有三種類型:組合型抬頭顯示系統(tǒng)C-HUD(Combiner-HUD)、風(fēng)擋型抬頭顯示W(wǎng)-HUD(Windshield-HUD)和增強(qiáng)現(xiàn)實(shí)型抬頭顯示系統(tǒng)AR-HUD(Augmented Reality HUD)。
1.C-HUD
C-HUD更多應(yīng)用在后裝市場,其會在汽車儀表上方、儀表板頂部加裝一個(gè)半透明樹脂板,再將該樹脂板作為投影介質(zhì)反射出虛像。該樹脂板通常會根據(jù)成像條件進(jìn)行特殊處理,例如做成楔形來避免反射重影,提升顯示效果。
相較W-HUD和AR-HUD,C-HUD成本較低,但具有以下三方面劣勢:
成像區(qū)域小,顯示內(nèi)容有限;
成像距離近,成像高度較低;
布置位置處于駕駛員前方的儀表板上,在車輛碰撞時(shí)可能會對駕駛員產(chǎn)生二次傷害。
2.W-HUD
W-HUD用于前裝,目前有多條技術(shù)路線:基于曲面反射鏡放大成像、基于全息光學(xué)元件(HOE)放大成像和基于全息光波導(dǎo)(Waveguide)放大成像。目前HOE和Waveguide技術(shù)尚未成熟,主要應(yīng)用的為基于曲面反射鏡放大成像技術(shù)。
W-HUD使用前擋風(fēng)玻璃作為成像介質(zhì)來反射成像,可以支持更大的成像區(qū)域和更遠(yuǎn)的投影距離。W-HUD的劣勢在于,擋風(fēng)玻璃通常為曲面反射鏡,W-HUD必須根據(jù)擋風(fēng)玻璃的尺寸和曲率去適配高精度曲面反射鏡,導(dǎo)致成本相對較高。
3.AR-HUD
AR-HUD和W-HUD一樣使用前擋風(fēng)玻璃作為成像介質(zhì)來反射成像,但AR-HUD成像區(qū)域更大、投射距離更遠(yuǎn)、成像也更為生動。
AR-HUD需要通過智能駕駛的傳感器(攝像頭、雷達(dá)等)對前方的路況進(jìn)行解析建模,以得到對象的位置、距離、大小等要素,再把HUD顯示的信息精準(zhǔn)地投影到對應(yīng)的位置。AR-HUD可將投射信息與交通環(huán)境進(jìn)行高度融合,例如行駛過程中的車道線貼合、前方障礙物/危險(xiǎn)物貼合、車道偏離預(yù)警與車道線貼合等。
因此現(xiàn)在的AR-HUD顯示方式大多分為上下兩層,下層是傳統(tǒng)數(shù)據(jù),上層是新增的輔助駕駛相關(guān)數(shù)據(jù)和指示畫面。這也變成了區(qū)分傳統(tǒng)W-HUD和AR-HUD的直接方式。
AR-HUD整體顯示效果出眾,是智能駕駛和智能座艙解決方案的重要組成部分。
雖然AR-HUD各方面性能都是最佳,但是體積最大,由于AR-HUD的光路需求比較大,體積就會增大,所以搭載該功能的車型都會在擋風(fēng)玻璃后方挖一個(gè)大洞,這樣看上去就沒有那么美觀了。同時(shí)目前AR-HUD技術(shù)還不夠成熟,顯示效果仍需提升。

04
HUD技術(shù)原理
一、基本原理
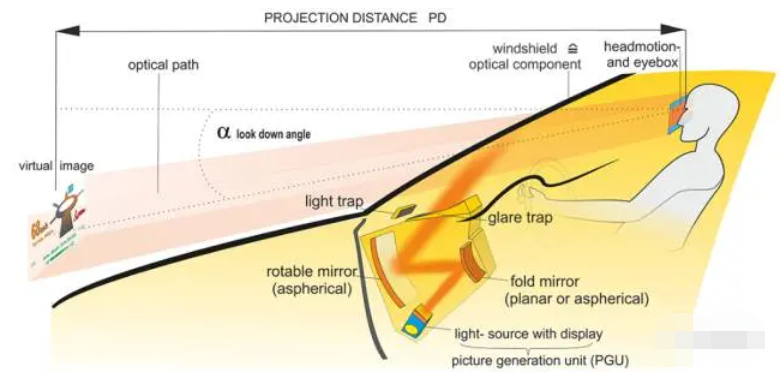
HUD本質(zhì)上是一個(gè)光學(xué)器件,其工作原理與投影儀基本相同,就是將需要顯示的信息投影到駕駛員前方的透明介質(zhì)上。
 ? ? ? ? ?
? ? ? ? ?
HUD主要由圖像生成單元(PGU)和光學(xué)顯示系統(tǒng)兩大部分構(gòu)成,圖像生成單元用以生成HUD輸出圖像,光學(xué)顯示系統(tǒng)用于顯示圖像。
二、圖像生成單元
圖像生成單元PGU(Picture Generation Unit)是HUD最核心的部件,占HUD總成本的50%左右。圖像生成單元的作用是生成HUD輸出圖像,由光源、光學(xué)膜片和其它光學(xué)組件構(gòu)成。
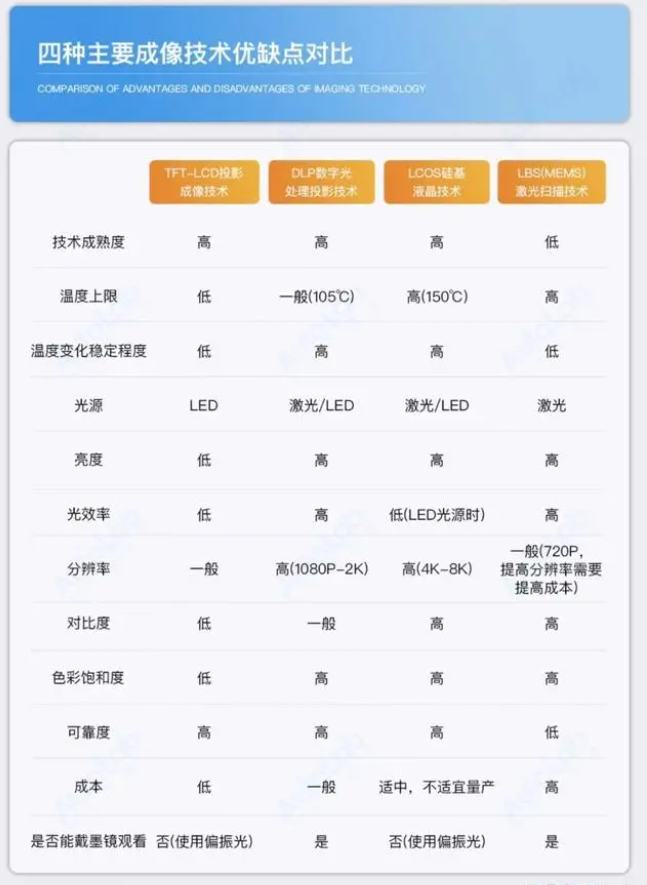
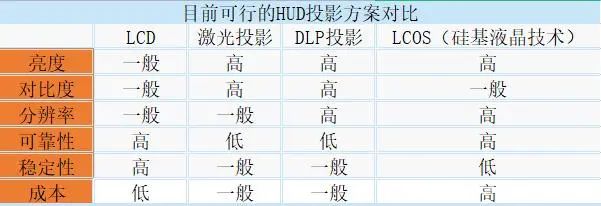
PGU是HUD的核心技術(shù)壁壘,其技術(shù)路線的選擇直接決定未來的產(chǎn)業(yè)發(fā)展路線,影像源部分的成像技術(shù)主要分為TFT,DLP,LCOS和LBS這四種形式。不同的技術(shù)路線,其光源和光學(xué)組件都完全不同。
1. 薄膜晶體管液晶顯示屏技術(shù)TFT-LCD
TFT是LCD液晶顯示技術(shù)的一種,TFT-LCD的工作原理是LCD被背光光源照亮后,通過集成在LCD面板每個(gè)像素點(diǎn)背后的薄膜晶體管驅(qū)動液晶分子旋轉(zhuǎn)改變光源偏振狀態(tài),從而呈現(xiàn)不同的明暗灰度,再通過RGB濾色片呈現(xiàn)彩色圖像。
TFT-LCD可以做到高響應(yīng)速度、高亮度、高對比度地顯示圖像信息,且技術(shù)成熟、成本低,是目前HUD的主流技術(shù)路線。
TFT-LCD技術(shù)的劣勢主要在于熱管理難度大,需要有更多熱管理方面的光學(xué)設(shè)計(jì)。
2.激光投影
采用激光作為光源,因激光具有良好的單色性、方向性(聚焦效果好),所以它無需匹配LCD HUD方案中復(fù)雜的光學(xué)系統(tǒng);
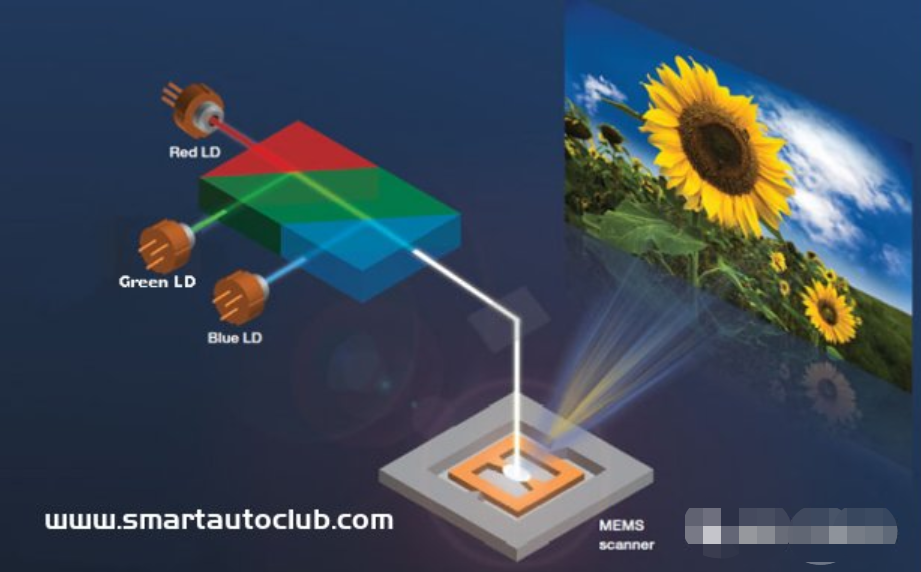
激光投影具有亮度高、飽和度高、衰減少、對比度好等特點(diǎn),非常適合投影信息簡單、亮度要求高的場景,目前主要應(yīng)用于室外大型投影和演出上;
目前再制約激光投影在車載HUD上應(yīng)用的一大障礙就是激光二極管對溫度較為敏感,不能達(dá)到車規(guī)級要求的85°環(huán)境溫度要求,也導(dǎo)致產(chǎn)品的穩(wěn)定性不佳;
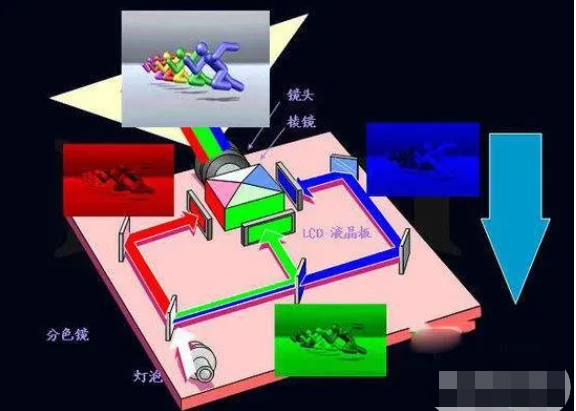
3.DLP投影
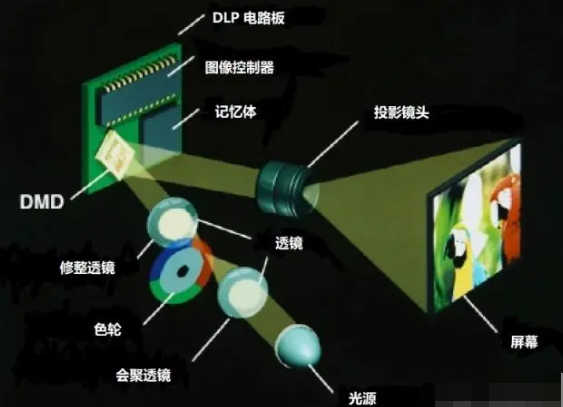
DLP全稱是Digital Light Processing 數(shù)字光處理技術(shù),它是集成上百萬個(gè)超微型晶片(DMD),這些晶片首先對影像信號經(jīng)過數(shù)字處理,然后再轉(zhuǎn)為光投影出來;
DLP投影技術(shù)具有分辨率高、亮度高、成像效果好等特點(diǎn),目前主要是被豪華品牌車型的前裝HUD所采用
由于DLP是全平面投影,為了提升顯示效果,就需要針對車型匹配高精度的反射非球面玻璃,無形中增加了很高的成本,而且后期的維修成本也不低,所以選裝了原廠HUD的務(wù)必要買玻璃險(xiǎn);
國內(nèi)的很多豪車基本選用這種方案,特別是寶馬的HUD在市場的反饋還是非常好的,唯一的缺點(diǎn)就是選裝成本有點(diǎn)高,后期的維修成本也不低;
4.LCOS投影
LCOS 全稱 Liquid crystal on silicom 硅基液晶投影技術(shù),看名字可能有點(diǎn)迷糊,
我們可以把它理解為一種LCD的升級,它采用涂有液晶硅的CMOS集成電路芯片作為反射式LCD的基片,
簡單理解就是LCD以玻璃為基板,LCOS則以硅晶圓為基板;
LCOS在光效率上非常高,傳統(tǒng)的LCD可能就3%左右,但LCOS則可高達(dá)40%;
三、光學(xué)顯示系統(tǒng)
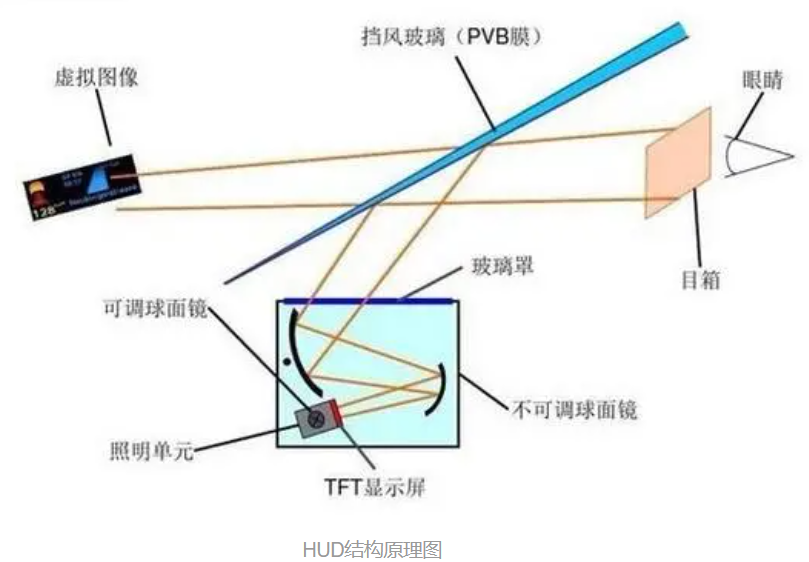
HUD的光學(xué)顯示系統(tǒng)一般包括反射鏡、調(diào)節(jié)電機(jī)及控制單元與前擋風(fēng)玻璃。
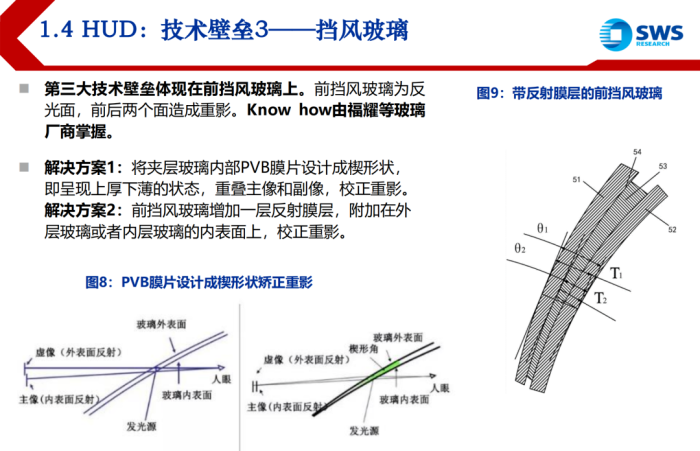
1. 前擋風(fēng)玻璃
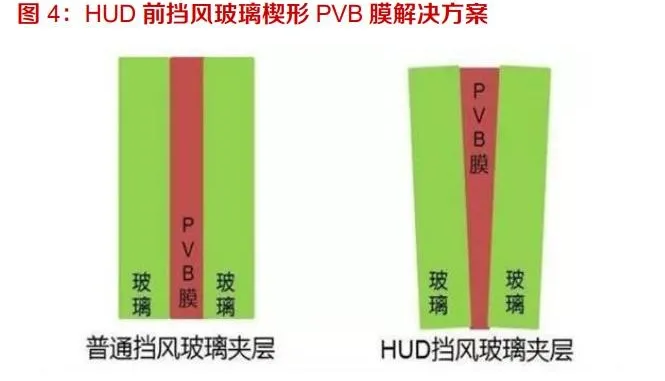
除C-HUD依賴放置于儀表板上方的樹脂曲面鏡成像外,W-HUD和AR-HUD都需要通過擋風(fēng)玻璃成像。前擋風(fēng)玻璃的結(jié)構(gòu)有內(nèi)外兩層玻璃,內(nèi)外兩層玻璃之間存在一層PVB薄膜夾層。若將HUD圖像通過普通擋風(fēng)玻璃投射,在玻璃厚度和傾斜角度作用下,很容易行車虛像重影,投射效果差。
為了消除重影,目前的主流方案是將玻璃夾層內(nèi)PVB夾層制成楔形,使玻璃呈上厚下薄的狀態(tài)。
此外,還可以通過在外層玻璃或內(nèi)層玻璃的內(nèi)表面上附加一層反射膜層,用于校正重影。
2.反射鏡
反射鏡和擋風(fēng)玻璃需要進(jìn)行擬合以盡可能消除畫面畸變。自由曲面反射鏡磨具需要用精密儀器制造,做成納米級,非球面鏡需要一次成型。

3.控制單元
HUD的控制單元接入車輛數(shù)據(jù)總線,獲取車速、導(dǎo)航、智能駕駛等信息,并在圖像生成單元輸出圖像。
05
HUD顯示內(nèi)容
HUD的初衷是幫助駕駛員減輕認(rèn)知負(fù)荷,提升對當(dāng)前情勢的感知能力。通常可在HUD上顯示的信息包括:車輛信息和外界信息。
1.車輛信息
車輛信息指能夠反映當(dāng)前車輛狀態(tài)的信息,HUD一般通過車載總線獲取,具體包括以下四類:
1)核心信息指在傳統(tǒng)儀表上顯示的部分重要信息,如車速、轉(zhuǎn)速、里程、油量等。
2)提示信息指在車輛行駛過程中需要顯示部分提示信息,如擋位、轉(zhuǎn)向燈、遠(yuǎn)光燈、霧燈、車內(nèi)溫度、瞬時(shí)油耗等。
3)報(bào)警信息包括請求駕駛員接管、安全帶提醒、燃油/電量不足、發(fā)動機(jī)狀態(tài)、車門狀態(tài)、駐車狀態(tài)、機(jī)油剩余量、胎壓、安全氣囊狀態(tài)、玻璃清洗液存量等。
4)附加信息指部分車型上的特色功能信息,如四驅(qū)模式、轉(zhuǎn)向模式、駕駛模式、天窗及天窗開啟狀態(tài)、座椅狀態(tài)、底盤狀態(tài)等。
2.外界信息
HUD除了可獲取車輛自身的狀態(tài)信息外,還可通過與外界的交互獲取更多外界信息,具體包括:
1)出行包含有定位、地圖、導(dǎo)航、行人/障礙物檢測、車道保持輔助等信息。
2)安全主要顯示來自智能駕駛系統(tǒng)感知到的實(shí)時(shí)交通情況,以輔助駕駛員安全駕駛,包括:超速預(yù)警、前車碰撞預(yù)警、車距信息提示、交通信號燈提示、道路安全預(yù)警、遠(yuǎn)程故障診斷信息等。
3)生活主要指通過車聯(lián)網(wǎng)獲得的交通違章信息、保養(yǎng)信息、停車場車位信息、代駕預(yù)定等。
4)智能辦公如微信、郵件、電話、語音/視頻會議、文檔處理等。
5)娛樂如音樂和電臺的播放控制、音量控制、影音媒體播放及控制等。
二、HUD顯示設(shè)計(jì)
1.布局原則
根據(jù)交互設(shè)計(jì)中的希克定律:一個(gè)人所面臨的選擇越多,做出選擇所花的時(shí)間就越多,當(dāng)面臨選擇的數(shù)量增加,做出決定的時(shí)間也會跟著增加。
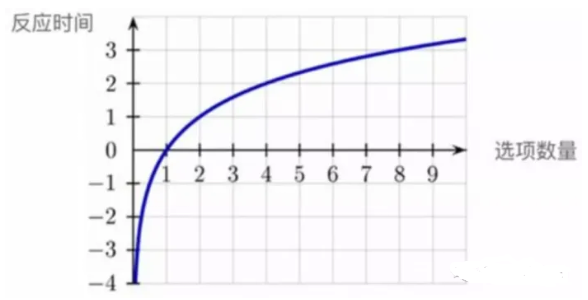
因此,HUD界面上實(shí)時(shí)呈現(xiàn)的主要設(shè)計(jì)元素?cái)?shù)量最好保持在1-3個(gè)以內(nèi),呈現(xiàn)最關(guān)鍵信息的設(shè)計(jì)元素(或視覺元素組)數(shù)量最好只有一個(gè)。最快的獲取關(guān)鍵駕駛車輛信息是HUD界面布局的出發(fā)點(diǎn),使用過程中不需要駕駛員思考就能獲取信息是最佳的設(shè)計(jì)。
2.顯示區(qū)域分類
根據(jù)所顯示信息的重要程度,可將HUD的顯示區(qū)域劃分為三個(gè)部分:
核心顯示區(qū)域:用于持續(xù)顯示,或隨行車情況的變化自動同步激活顯示;
輔助顯示區(qū)域:層級交替共享顯示;
隨機(jī)顯示區(qū)域:基于車聯(lián)網(wǎng)和大數(shù)據(jù)的實(shí)時(shí)信息,根據(jù)實(shí)時(shí)道路與車輛狀態(tài)信息進(jìn)行顯示。
HUD界面上顯示的內(nèi)容與方式通常允許用戶自定義,但為防止過多信息的顯示給駕駛員帶來視覺負(fù)擔(dān),要對顯示的信息總量進(jìn)行控制。
此外,大部分生活、辦公、娛樂功能的信息不屬于輔助駕駛界面的顯示內(nèi)容,可以將其設(shè)置為低車速或駐車狀態(tài)下才在HUD虛像界面上顯示,而此時(shí)它們可以占據(jù)核心功能顯示的區(qū)域。這類界面可采用移動互聯(lián)終端信息扁平化的模式來構(gòu)建,以確保其操作的便捷。
06
如何鑒別HUD的好用程度
了解四種具體成像原理的優(yōu)劣對比,我們可以從整體上看看如何鑒別HUD的好用程度,推薦大家看幾個(gè)參數(shù),成像距離和視場角。
HUD的成像距離越遠(yuǎn),眼睛就不需要來回切換對焦,越不易產(chǎn)生疲勞,所以這個(gè)參數(shù)是越遠(yuǎn)越好。
視場角是水平和垂直兩個(gè)角度,他們代表了投影的范圍,結(jié)合成像距離,共同組成了大家經(jīng)常在宣傳中看到的“等效XX寸”的巨幕。
就和看電影一樣,大家買票的時(shí)候一般都會偏向于全景影幕廳,并且選擇中間偏后排的位置進(jìn)行觀看,這樣能獲得比較好的視覺體驗(yàn)。離屏幕的距離就像是“成像距離”,而視場角則決定了屏幕的尺寸,這兩個(gè)參數(shù)決定了HUD的視覺體驗(yàn)。
目前AR-HUD憑借更遠(yuǎn)的成像距離,更大的投影視場角,成為了主流發(fā)展趨勢。

綜合對比下來,奔馳EQS和寶馬740Li AR-HUD的視覺體驗(yàn)應(yīng)該是最好的。
當(dāng)然,這些影響要素還需要結(jié)合HUD本身的成像技術(shù)展現(xiàn)來進(jìn)行綜合評判,環(huán)境光線、使用時(shí)長和安裝品控等等都能直接影響到用戶的體驗(yàn)反饋,這也導(dǎo)致了目前很多用戶對HUD功能褒貶不一的現(xiàn)象。
07
HUD光學(xué)模擬軟件
TT-HUD軟件測試套件,用于亮度、色度、對比度、MTF、鬼影、畸變、eyebox等指標(biāo)光學(xué)性能的評估。
使用電控鏡頭和軟件針對可變距離投影快速對焦,并自動計(jì)算出實(shí)際距離單位的VID值。
08
AR-HUD該具備哪些性能?
1、虛像距離VID>7.5m
2、視場角FOV>10°
3、亮度>12000cd/m2
4、消除重影
5、畸變矯正
6、良好的散熱
7、消除光斑
8、前方道路融合
9、眼盒&駕駛員視線追蹤
所謂“眼盒”,就是眼睛可移動的區(qū)域,如果眼睛位于這塊區(qū)域內(nèi)則能夠看清整個(gè)圖像,反之出了這塊區(qū)域,則無法看全整個(gè)圖像。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2551文章
51099瀏覽量
753573 -
顯示器
+關(guān)注
關(guān)注
21文章
4979瀏覽量
139986 -
顯示系統(tǒng)
+關(guān)注
關(guān)注
1文章
141瀏覽量
24268 -
HUD技術(shù)
+關(guān)注
關(guān)注
4文章
11瀏覽量
7316
原文標(biāo)題:HUD基礎(chǔ)知識
文章出處:【微信號:心植桂冠,微信公眾號:心植桂冠】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦

Verilog HDL的基礎(chǔ)知識
負(fù)載開關(guān)基礎(chǔ)知識

全新的半導(dǎo)體基礎(chǔ)知識
光纖通信技術(shù)基礎(chǔ)知識

什么叫HUD?愛普生推出一種HUD芯片整合方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論