 車載以太網的物理層功能
車載以太網的物理層功能
來源:汽車ECU網絡診斷技術 張大俠
近年來,顧客對汽車的安全性、舒適性、娛樂性要求越來越高,所以汽車上增加的功能也就越來越多,而且大部分新增功能都是通過電子技術來實現的,這就導致車載網絡上交互的信息量也越來越大,所以汽車行業的工程師們就想到了把Ethernet/IP技術移植到汽車上來用,以太網技術不但支持的帶寬比現在的車載總線大得多, 而且在其他領域已經有了足夠豐富的應用,技術和方案成熟,規模大所以成本也可以控制。 這篇文章先介紹一下車載以太網的物理層技術。
目前的車載百兆以太網技術原來的名字叫OABR (Open Alliance BroadR-Reach) ,Open Alliance是包括Broadcom公司在內的一些公司搞的一個聯盟, BroadR-Reach技術是Broadcom公司提出的百兆以太網技術,現在OABR 已經由 IEEE 標準化,并命名為100BASE-T1。 傳統的百兆以太網的名字是100BASE-TX,二者在物理層上差別很大。
二者最顯著的區別就是,100BASE-T1在物理連接上使用了一對雙絞線實現全雙工的信息傳輸,而100BASE-TX則使用了兩對雙絞線實現全雙工,一對用于收,另一對用于發。 100BASE-T1利用所謂的回音消除技術(echo cancellation)實現了在一對雙絞線上的全雙工通信。 回音消除技術的大概過程是這樣的,作為發送方的節點將自己要發送的差分電壓加載到雙絞線上,而作為接收者的節點則將雙絞線上的總電壓減去自己發出去的電壓,做減法得到的結果就是發送節點發送的電壓。
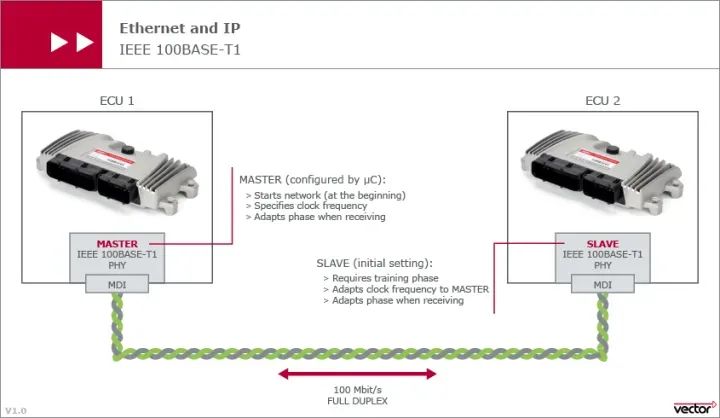
車載百兆以太網100BASE-T1示意圖。 圖片來源:vector
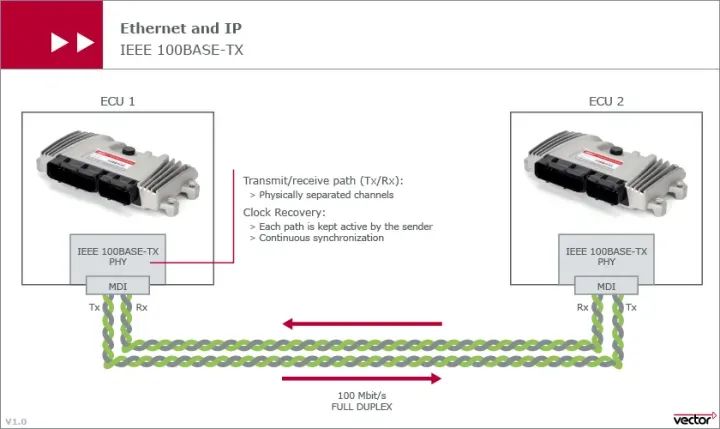
普通百兆以太網100BASE-TX示意圖。 圖片來源:vector
車載以太網的物理層功能全部實現在一個名為PHY的模塊上,它將以太網控制器和物理介質連接到一起。 以太網控制器和PHY之間通過一個標準化的名為MII(與介質無關的接口,見下圖)的接口連接。
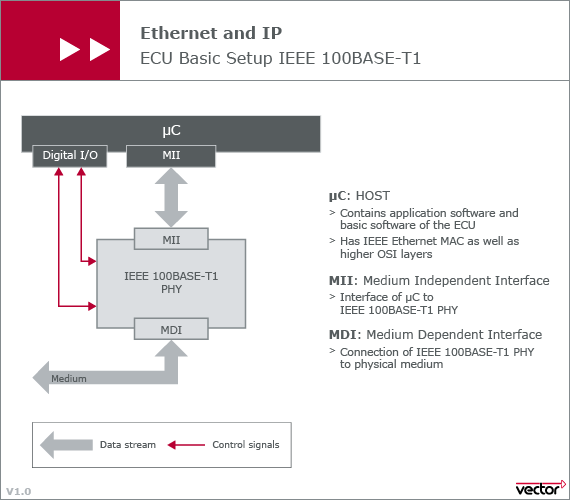
微控制器和PHY之間的連接示意圖。 圖片來源:vector
對于車載百兆以太網100BASE-T1來說,控制器在MII接口的時鐘頻率是25MHz,每個時鐘周期發出4個bit(25MHz * 4bit = 100Mbit/s)。 下面介紹一下PHY接收到MII接口來的數據流之后的編碼過程。 在發送端ECU,PHY接收到來自MII的數據之后,要經過三個步驟進行編碼,才能形成最終發送到雙絞線上的電信號。 過程下如圖:
PHY中實現的編碼過程
物理層
以vector提供的一個例子來講一下。
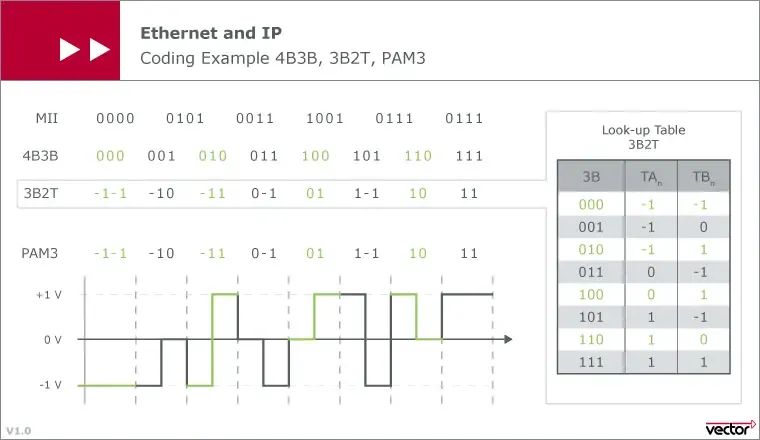
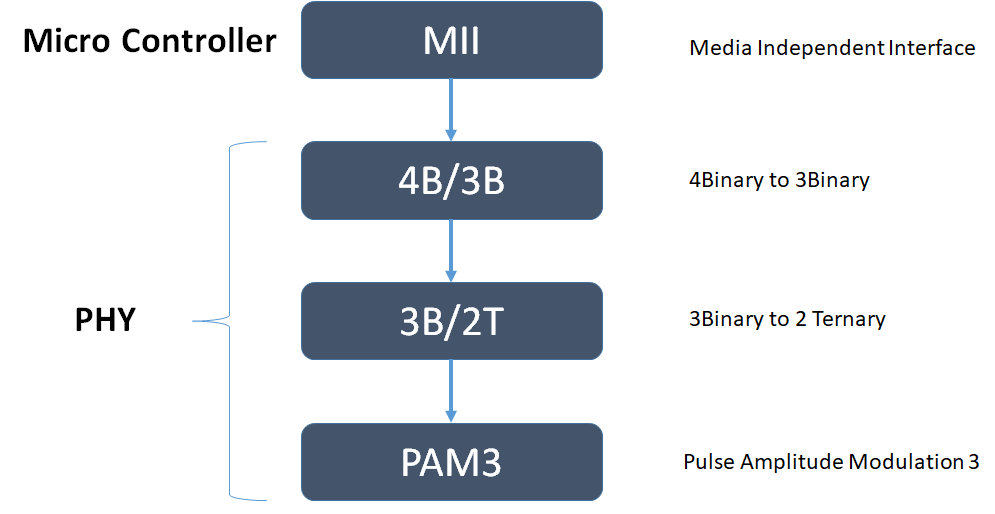
PHY中的編碼過程示例。 圖片來源:vector
在微控制器的每個時鐘周期中,MII接口到來的數據是4個bit,PHY從MII接口收到數據后,會首先進行一個4B3B的轉換,為了匹配25MHz * 4bit = 100Mbit/s的速率,PHY的MII接口時鐘周期應該是33.3333M,每次接收3bit,也實現了33.3333M * 3bit = 100Mbit/s的速率。 之后PHY要再進行3B2T的操作,將每次接收到的3個bit轉化為2個電平值(取值范圍是-1,0,1),具體的對應關系如上圖中的表所示。 3個bit有8種組合(即2的三次方),兩個電平值有9種組成(即3的平方),所以后者可以覆蓋前者。 此時時鐘周期仍然是33.333M,但是每個時鐘周期中的兩個電平就能夠表示3個 bit了,所以此時的數據速率仍然是100Mbit/s,每個電平實際上包含了1.5bit信息。 最后一步是PAM3,將邏輯的-1,0,1轉化為在雙絞線上的電壓,所以,最終在總線上信號的波特率是66.666MHz,但是它實現了100Mbit/s的通信速率。
審核編輯:湯梓紅
-
ecu
+關注
關注
14文章
886瀏覽量
54501 -
物理層
+關注
關注
1文章
150瀏覽量
34370 -
PHY
+關注
關注
2文章
303瀏覽量
51742 -
車載以太網
+關注
關注
18文章
222瀏覽量
23000 -
車載總線
+關注
關注
0文章
4瀏覽量
1219
原文標題:車載以太網物理層
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ADI推出時限通信的可靠以太網物理層解決方案
重磅!裕太微再出力作!車載千兆以太網物理層芯片YT8011系列

如何實現以太網無縫傳輸?以太網物理層設備的考量與Ethernet-APL

工業以太網有何優勢?工業以太網物理層介紹
工業以太網有什么優勢?工業以太網物理層介紹
Ethernet-APL以太網高級物理層的優勢
如何在以太網物理層PHY上解決功耗、延遲以及數據可拓展性問題
ZLG致遠電子新一代車載以太網全雙工物理層轉換器發布

淺談汽車以太網物理層IOP測試






 工商網監
工商網監
評論