 詳解智能汽車車身感知系統
詳解智能汽車車身感知系統
本文主要針對車身感知定位系統進行介紹,車身感知主要是感知車輛位置、行駛速度、姿態方位等信息,下文分別介紹了慣性導航、衛星導航系統和高精度地圖三種主要的定位技術的發展情況,最后對多融合的車身感知定位系統及發展趨勢進行介紹。
車身感知定位系統主要由慣性導航、衛星導航系統和高精度地圖組成。主要是以高精地圖為依托,通過慣性導航系統和全球定位系統(Global Navigation Satellite System,GNSS)。GNSS 通過導航衛星可以提供全局的定位信息,慣導系統可以提供不依賴于環境的定位信息,高精地圖為車輛環境感知提供輔助,提供超視距路況信息。三者取長補短、互相配合,共同構成自動駕駛定位導航系統。根據技術原理,自動駕駛的定位技術主要可以分為基于信號定位、航位推算和地圖匹配三大類:
(1) 基于信號的定位:采用飛行時間測距法(Time of Flight,ToF)獲得汽車與衛星的距離,然后使用三球定位原理得到汽車的絕對位置,主要就是通過全球衛星GNSS 的衛星信號進行定位,還包括使用WiFi、UWB、FM 微波等其他信號獲取信息等技術;
(2) 航跡遞推(Dead Reckoning):依靠慣性傳感器獲得加速度和角速度信息,根據上一時刻其策劃的位置和航向遞推出當前的位置和航向;
(3) 地圖匹配(Map Matching,MM):基于視覺攝像頭(Camera)或激光雷達(LiDAR)采集到的數據特征與高精度地圖數據中的特征進行匹配,得到車輛的位置和姿態。
 信號定位、航跡遞推與地圖匹配技術組成了車身感知定位技術
信號定位、航跡遞推與地圖匹配技術組成了車身感知定位技術
慣性導航:車身感知定位系統的信息融合中心
慣性導航系統(Inertial Navigation System, INS)是一種不依賴外部信息、也不向外部輻射能量的自助式導航系統。 慣性導航系統(INS)是利用慣性傳感器(IMU)測量載體的比力及角速度信息,結合給定的初始條件,與GNSS等系統的信息融合,從而進行實時推算速度、位置、姿態等參數的自主式導航系統。慣性導航系統屬于一種推算導航方式,即從一已知點的位置根據連續測得的運載體航向角和速度推算出其下一點的位置,因而可連續測出運動體的當前位置。
一個慣性測量單元包括3 個相互正交的單軸加速度計(Accelerometer)測量轉動運動和3 個互相正交的單軸陀螺儀(Gyroscopes)測量平移運動的加速度。自動駕駛所需要的慣性傳感器(IMU)主要是加速度計和陀螺儀。(1)加速度計:基于牛頓第二定律,采用電容式、壓阻式或熱對流原理,通過在加速過程中對質量塊對應慣性力的測量來獲得加速度值。用來測量運動體坐標系上各軸的加速度;(2)陀螺儀:用于測量載體繞自身三個坐標軸的轉動角速度,同時也敏感地球自轉的角速度。
按照力學編排實現形式可分為:捷聯式慣性導航系統(Strap-down Inertial Navigation, SINS)和平臺式慣性導航系統(Gimbaled Inertial System, GINS)。平臺式慣導的傳感器安裝在多軸伺服平臺上作為反饋元件,控制伺服平臺的姿態達到設定,多用于沿地球表面作等速運動的飛行器(如飛機、巡航導彈等),捷聯式慣導的傳感器和載體一同運動,省去了平臺,結構簡單、體積小、維護方便,自動駕駛領域主要采用捷聯式慣性導航系統。
航跡遞推(Dead Reckoning,DR)算法是慣性導航系統的主要實現手段。DR算法是指已知上一時刻導航狀態(狀態、速度和位置),根據傳感器觀測值推算到下一時刻的導航狀態。DR 算法包括姿態編排和位置編排兩個部分。姿態編排使用的是AHRS(Attitude and heading reference system)融合算法,處理后輸出車機姿態信息。DR 算法可以在無衛星導航信號或弱衛星導航信號的場景,僅靠DR 算法也能得到較為可靠的導航信息。
慣性導航系統是車身感知定位系統的信息融合中心,具有不可替代的作用。慣性導航的數據實時存在,永不消失,性能穩定,可以連續100Hz 高頻工作,慣導是三種定位方法中最為可靠的,具有輸出信息不間斷、不受外界干擾等獨特優勢,可保證在任何時刻以高頻次輸出車輛運動參數,同時將視覺傳感器、雷達、激光雷達、車身系統信息進行更深層次的融合,為決策層提供精確可靠的連續的車輛位置,姿態的信息,車身感知定位系統的信息融合中心。
 慣性導航系統作為車身感知定位系統的信息融合中心
慣性導航系統作為車身感知定位系統的信息融合中心
衛星導航:RTK 助力GNSS 實現厘米級的定位
全球導航衛星系統(Global Navigation Satellite System,GNSS)是以人造地球衛星為導航臺,為全球海陸空的各類軍民載體提供位置、速度和時間信息的空基無線電導航定位系統。導航衛星的工作原理主要是通過三球定位原理實現的,由于衛星的位置精確可知,通過衛星到接收機的距離,利用三維坐標中的距離公式,利用3 顆衛星,就可以組成3 個方程式,解出觀測點的位置。考慮到衛星的時鐘與接收機時鐘之間的誤差,實際上有4 個未知數,位置的X、Y、Z 和鐘差,因而需要引入第4 顆衛星,形成4 個方程式進行求解,從而得到觀測點的經緯度和高程。為提高定位精度,普遍采用差分GPS 技術,建立基準站(差分臺)進行觀測,利用已知的基準站精確坐標,與觀測值進行比較,從而得出修正數,并對外發布。接收機收到該修正數后,與自身的觀測值進行比較,消去大部分誤差,得到一個比較準確的位置。
衛星導航系統主要包括全球四大導航衛星系統,以及區域系統和增強系統。全球4 大衛星導航系統供應商,包括美國的全球定位系統GPS、俄羅斯的格洛納斯衛星導航系統(GLONASS)、歐盟的伽利略衛星導航系統(GALILEO)和中國的北斗衛星導航系統(BDS)。除此之外,還有日本、印度等國家的區域衛星導航系統。
 國際四大衛星導航系統簡介
國際四大衛星導航系統簡介
使用RTK 技術可以幫助GNSS 實現厘米級的定位精度。RTK(Real-time kinematic)載波相位差分技術,其原理是衛星軌道誤差、衛星鐘差、電離層延遲、對流層延遲等誤差對相距不遠的GNSS 站影響接近,特定的地理坐標點、衛星接收站等,以該點位為中心的20-40km 半徑范圍內,可以通過站間觀測值差分消除,進而實現相位模糊度的快速固定與瞬時厘米級定位。
 GNSS-RTK 系統的應用
GNSS-RTK 系統的應用
高精度地圖:實現L3 及以上自動駕駛的必備基礎
高精度地圖,即HD Map(High Definition Map)或HAD Map(Highly Automated Driving Map),是指絕對精度和相對精度均在1 米以內的高精度、高新鮮度、高豐富度的電子地圖。其信息包括道路類型、曲率、車道線位置等道路信息,路邊基礎設施、障礙物、交通標志等環境對象信息,以及交通流量、紅綠燈狀態信息等實時動態信息。根據地圖信息的不同,高精度地圖由底層到上層可以分為四個層級:為靜態地圖、準靜態地圖、準動態地圖和動態地圖。
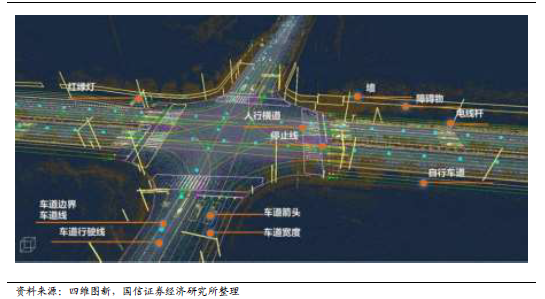 高精度地圖概念示例
高精度地圖概念示例
 高精度地圖的四個基本層級及屬性信息
高精度地圖的四個基本層級及屬性信息
高精度地圖比傳統地圖優勢顯著。與傳統地圖相比,基于自動駕駛系統的需求,高精度地圖在保留地圖檢索、道路規劃、渲染、誘導等功能基礎上,側重地圖信息豐富性、精度高、提升計算機器或汽車智能化三大方向,以及高頻更新、標識橫縱向定位、坡度曲率節能應用與舒適性提升等。
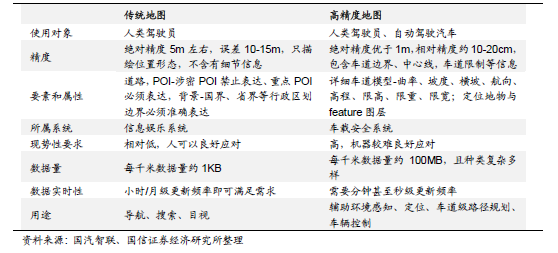 高精度地圖與傳統地圖的比較
高精度地圖與傳統地圖的比較
高精度地圖是是L3 及以上級別的自動駕駛汽車的必備基礎。 高精度地圖可有效彌補傳感器的性能邊界,提供重要的先驗信息,是實現高度自動化駕駛甚至無人駕駛的必要條件,也是未來車路協同的重要載體。高精地圖對自動駕駛汽車的作用具體表現在以下幾個方面:
? 提供先驗信息:與車載傳感器相比,高精度地圖不受天氣環境、障礙物和探測距離等限制,為自動駕駛汽車提供安全冗余。同時,高精地圖可以為車輛縱向加減速、橫向轉向及變道等決策提供先驗信息,提高駕駛舒適性并實現智能節能;
? 節約算力:高精度地圖可預知紅綠燈、車道線、道路標識牌等交通要素的位置,有助于提高傳感器的檢測精度和速度,節約計算資源;
? 輔助規劃決策:路口紅綠燈狀態、道路交通流量、路網變化情況,以及車輛傳感器信息等都可以傳遞至高精度地圖服務平臺,通過服務平臺實現智能路徑規劃;
? 收集駕駛數據:通過眾包采集,實現駕駛場景數據庫的豐富,為無人駕駛系統進行仿真驗證、優化人工智能訓練等提供重要基礎數據。
 高精度地圖是L3 及以上級別的自動駕駛汽車的必備基礎
高精度地圖是L3 及以上級別的自動駕駛汽車的必備基礎
行業擁有較高準入門檻,百度、四維圖新和高德三足鼎立
高精度地圖行業擁有較高的準入門檻,需要有甲級測繪資質。測繪資質方面,我國對企業獲得地圖測繪與制作資質有嚴格的要求,并不對國外廠商開放。2016 年出臺的《關于加強自動駕駛地圖生產測試與應用管理的通知》規定,自動駕駛地圖的繪制需由具有導航電子地圖制作測繪資質的單位承擔,在道路測試過程中要嚴格限制地圖接觸的人員范圍,對于初創公司來說有一定的門檻要求。截至2021 年12 月,僅有28 家公司進入國內高精地圖甲級測繪資質名單。
 國內高精地圖甲級測繪資質名單(截至2021 年12月)
國內高精地圖甲級測繪資質名單(截至2021 年12月)
國內圖商占主要份額,百度、四維圖新和高德呈現“三足鼎立”的局面。 由于高精度地圖涉及國家地理機密,國內高精度地圖主要玩家大多是本土公司,根據IDC 統計,2020 年國內高精度地圖行業市場份額前五名公司為百度、四維圖新、高德、易圖通以及Here,其中CR3 超過65%,呈現“三足鼎立”的局面。
 2020 年國內高精度地圖市場競爭格局
2020 年國內高精度地圖市場競爭格局
集中采集和眾包采集高度整合是未來地圖數據采集的主要趨勢
高精度地圖的制作大致分為數據采集、繪圖、更新和驗證四部分。 其中數據采集提供地理數據的來源,繪圖環節通過數據融合及相關算法完成語義識別,將地理數據轉換為道路模型,更新環節結合傳感器等硬件實現高精度地圖的實時更新,驗證環節則結合人工與AI 算法完成最后的確認。
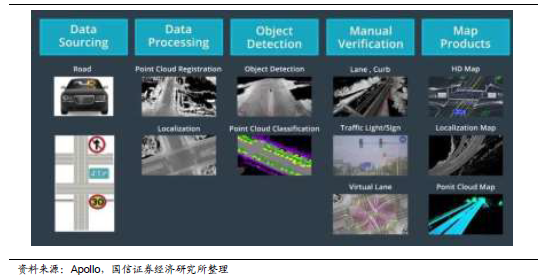 Apollo 平臺高精度地圖的制作過程
Apollo 平臺高精度地圖的制作過程
高精度地圖的數據采集成本較高。 數據采集消耗成本巨大,僅一輛高精地圖采集車需要配置的設備就包括:激光雷達、攝像頭、陀螺儀、GPS 接收機、數據存儲和計算設備等。同時,高精地圖精細程度高,傳統地圖生產方式難以滿足其量產應用的需要。采用傳統測繪車方式,在成本約束下,測繪效率很難大幅度提高。
數據采集方式有集中采集和眾包采集 :(1)集中采集:精度高,但更新頻率低、采集成本高,高德、百度、Tomtom 等公司更多采用專業測繪車集中制圖;(2)眾包采集:數據鮮度高、成本低,但采集精度低、可靠性和一致性較差,豐田、特斯拉、Here 等廠商則選擇采用眾包采集的模式。未來,以集中采集為建圖基礎,在海量眾包數據中快速提煉符合規范的靜態圖層變更信息和動態圖層實況信息,兩者深度結合的技術模式成為主流的方向。
 集中采集+眾包采集是數據采集的未來方向
集中采集+眾包采集是數據采集的未來方向
多源數據融合成為需要,自動化繪制起成為發展趨勢 。高精度地圖提供的地圖數據不僅包括傳統路網信息,還包括高精度車道級及環境信息數據,以及動態感知層和駕駛決策層部分信息,數據繪制的自動化和智能化成為重要的發展趨勢。目前常用的繪圖方法是將采集環節得到的數據經過清洗、加總建模后借助語義識別模型進行繪圖。而借助AI 技術完成不同傳感器數據自動融合識別,即把GNSS/INS、點云、圖像等數據疊加在一起,進行道路標線、路沿、路牌、交通標志等道路元素的識別,從而簡化高精地圖數據處理流程并不斷提高制圖效率,對于復雜環境尤為重要。
 Mobileye 在繪圖過程中所采用的語義識別模型
Mobileye 在繪圖過程中所采用的語義識別模型
更新技術面臨挑戰,5G 賦能或成解決方案。 高精度地圖的更新,考慮到當前的技術水平和成本,季度更新策略最佳。在更新的時候,可以采用小版本部分更新或者是增量更新的方式,大版本采用全部更新的策略。對于高精地圖里的動態或準動態部分,一般通過車聯網以實時或準實時(秒到小時級別)的頻率更新。
未來高精度地圖會更多的借助大數據和地圖云服務平臺進行更新和分發。這其中,5G 賦能讓高精度地圖和云計算結合得更加緊密,更加實時。5G 網絡帶來數據傳輸速率的大幅提升,讓高精度地圖的采集與更新變得更加實時動態。專業化高精度采集、眾包采集和路側采集等多種地圖采集方式的動態信息,依托5G 網絡實時同步至云端進行加工處理;同時,更新后的高精度地圖及實時信息從云端對道路上行駛的車輛進行同步更新。
 5G 技術在性能上是數據更新的良好選擇
5G 技術在性能上是數據更新的良好選擇
車路協同高速發展,高精度地圖與路側感知體系互相成就。 一方面,路側的傳感器將成為高精地圖更新的有效數據來源。路側感知能力與車端感知能力緊密結合,增加信息冗余度,互相校驗及融合,為高精地圖提供更為精準豐富的信息。另一方面,高精度地圖可以賦能路側感知體系。前端感知設備與高精度地圖結合,實現前端感知數據附帶地理屬性,進而與平臺GIS 地圖無縫結合且可支持車路協同數據應用。
 路側感知模型示意圖
路側感知模型示意圖
成本負擔較高,成本隨精度要求急劇提升。高精度地圖的主要成本分為采集成本和編譯成本兩部分。其中采集成本包括備成本、采集車輛的行駛耗材、過路費及人力成本等,僅一輛高精地圖采集車需要配置的設備就包括:激光雷達、攝像頭、陀螺儀、GPS 接收機、數據存儲和計算設備等;而編譯制作成本主要是人力成本。
隨著地圖精度要求的提升,集中采集和眾包采集方法在數據收集與更新上的成本大幅上漲,主要是由于設備成本和人工成本的提升。但隨著5G 技術的發展與人工智能算法的進步,相關成本最終會趨于平穩。
 高精度地圖成本隨自動駕駛等級的增長而高速上升
高精度地圖成本隨自動駕駛等級的增長而高速上升
圖商從交付轉向服務,云平臺SaaS 是方向
盈利模式區別于傳統地圖,云平臺SaaS 模式是未來大方向。 區別于傳統地圖的的License 授權模式,高精度地圖的主要有按單位時間和按數據量收費兩種收費模式,核心區別在于收費穩定,初期階段基本以服務功能開發費+License組合為基礎;此外,還存在一種“免費”模式,即圖商向客戶免費提供現有數據產品,但同時客戶需向圖商提供收集到的數據,地圖的價格即為客戶收集數據的價值。
 高精度地圖與傳統地圖盈利模式的區別
高精度地圖與傳統地圖盈利模式的區別
由于高精地圖對數據更新的實時性提出很高的要求,從高精度的產品形態和服務方式角度,通過云服務平臺對實時更新的高精地圖數據進行實時分發是一種可行的方式,云平臺可以實時收集各車的行駛數據來補充道路情況信息閉環,增強收集數據密度而降低收集成本。
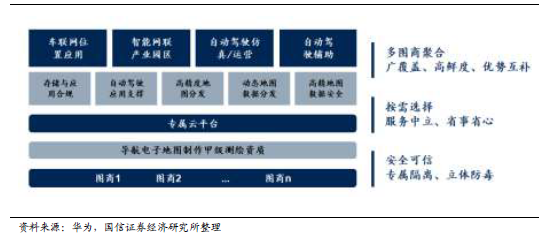 華為的高精度地圖云服務
華為的高精度地圖云服務
圖商的角色從交付向服務演變,客戶從B 端向C 端擴展。 由于高精度地圖需要實時更新,圖商不再只是交付并收費的模式,而是開始向地理信息數據服務商轉型。圖商正逐漸成為自動駕駛時代的重要參與者、合作者、服務商。同時,除了向車廠或者自動駕駛出行服務商提供地理信息數據服務這種B 端的業務,在大規模自動駕駛落地的趨勢下,高精度地圖也會向C 端延伸,但大規模的民用落地還需根據宏觀政策進行調整。
“GNSS+IMU+高精度地圖”組成多融合車身感知定位系統
車身感知定位系統主要由慣性導航、衛星導航系統和高精度地圖組成。主要是以高精地圖為依托,通過慣性導航系統和全球定位系統(Global Navigation Satellite System,GNSS)。GNSS 通過導航衛星可以提供全局的定位信息,慣導系統可以提供不依賴于環境的定位信息,高精地圖為車輛環境感知提供輔助,提供超視距路況信息。三者取長補短、互相配合,共同構成自動駕駛定位導航系統。
高精度是車身感知定位系統的核心。車身感知定位系統的關鍵是高精度,定位精度越高,自動駕駛的可靠性越高。第一,高精度的車身感知定位系統能夠不受極端天氣和環境等因素的干擾,能持續穩定地提供的車道級位置感知;第二,不同的傳感器有不同的工作時鐘和延遲,高精度車身感知定位系統能夠實現感知信息的時空同步;第三,高精度的車身感知定位系統可以在較少資源下獲得較高的定位精度,從而減少數據運算量,降低系統復雜程度;第四,高精度的車身感知定位系統能夠讓每一輛車都能夠精確地定出自己的位置,通過車車通信和車路通信把自己的位置分享給其他車輛,有利于實現V2X 應用。
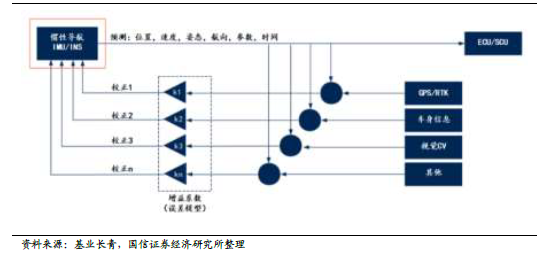
根據組合導航模塊的耦合程度不同,多傳感器融合的定位系統主要包括三種結構:松耦合(Loose Coupling)、緊耦合(Tight Coupling)和深耦合(Deep Coupling)。
? 松耦合(Loose Coupling):GNSS 和INS 獨立工作,GNSS 輸出RTK定位結果,INS 輸出慣性數據,兩者將數據送入濾波器內。濾波器通過比較二者的差值,建立誤差模型以估計INS 的誤差,并將誤差補償反饋給INS。優點是易于實現,性能比較穩定。缺點是當衛星數量低于最低數量時,GNSS 的輸出就會失效。且在信號存在遮擋的場景,定位穩定性、可靠性不如另外兩種耦合;
? 緊耦合(Tight Coupling):GNSS 輸出觀測量(偽距、偽距率)來與INS輸出的慣性數據作差,并將差值輸出給濾波器,從而用來進行INS 誤差的估計,并將誤差補償通過反饋的方式補償給INS,經過校正的INS 慣性數據輸入到組合導航模塊濾波器,結合RTK 定位結果最終得到組合導航解。
? 深耦合(Deep Coupling):在緊耦合的基礎上,將INS 的部分數據直接送到基帶芯片里,INS 的慣性數據作為GNSS 解算的一部分。通過INS 準確的相對多普勒變化信息,輔助信號跟蹤,提高惡劣環境下多普勒的估計準確度。從而提高惡劣環境下載波相位、偽距等觀測量的精度和連續性,減少觀測量中斷和跳變,從而有效提高組合導航精度和可靠性。
 松耦合、緊耦合和深耦合三種架構
松耦合、緊耦合和深耦合三種架構
根據百度Apollo 研究表明,通過GNSS-RTK 可實現65%的綜合場景定位誤差小于20cm的覆蓋率,GNSS+IMU的衛慣組合則可以實現85%左右的場景覆蓋,GNSS+IMU+感知與地圖的融合高精度定位系統可以實現97.5%的覆蓋率。
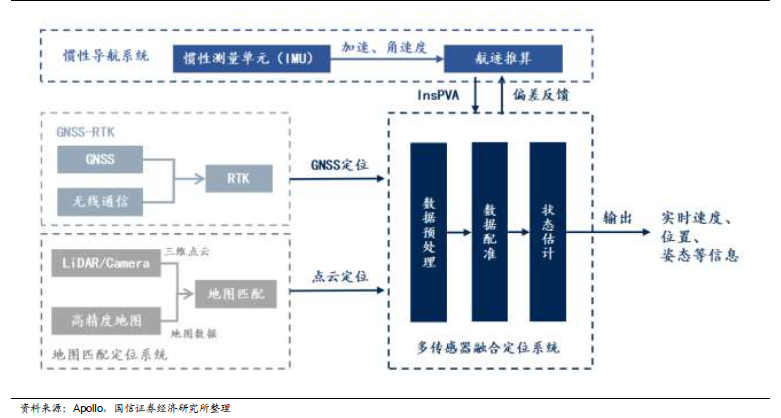
常用的GNSS-RTK+IMU 組合慣導方案在一些場景的定位精度穩定性仍不能完全滿足自動駕駛的要求,如城市樓宇群、地下車庫等。GNSS 長時間信號微弱的場景下,依靠GNSS 信號更新精確定位穩定性不足。在組合慣導中引入并融合激光雷達/視覺傳感定位等環境信息進行融合定位,形成GNSS-RTK+IMU 航跡推算+感知與高精度地圖匹配的定位系統是發展的必然。以百度Apollo 的多傳感器融合定位系統解決方案為例,慣性導航系統處于定位模塊的中心位置,模塊將IMU、GNSS、Lidar 等定位信息進行融合,通過慣性導航系統解算修正后最終輸出滿足自動駕駛需求的6 個自由度的高精度位置信息。
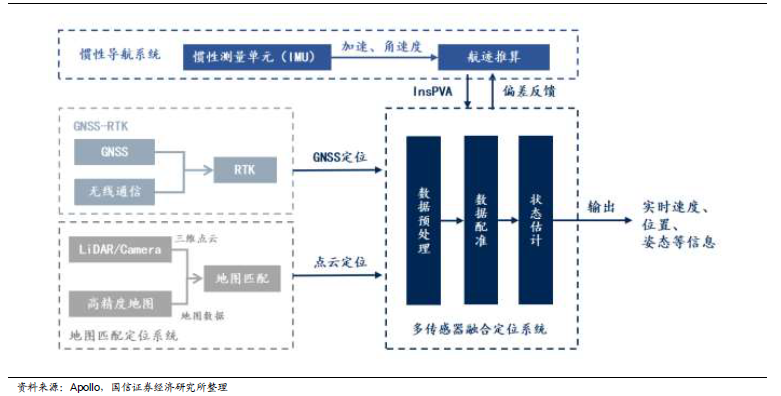 GNSS-RTK+慣性導航+地圖匹配系統組成的多融合車身感知定位系統
GNSS-RTK+慣性導航+地圖匹配系統組成的多融合車身感知定位系統
“GNSS-RTK+IMU+高精度地圖”的定位方案逐漸成為高階智能駕駛汽車的主流選擇
? 乘用車領域: 自2020 年開始,融合定位方案開始逐漸在新車型中落地,廣汽的埃安系列成為國內首個采用“GNSS+IMU+高精度地圖”高精度定位方案的車型, 再如小鵬P5 與P7 、紅旗E-HS9 等都采用了“GNSS-RTK+IMU+高精度地圖”的方案;
? 商用車領域: 無論運營場景復雜程度如何,“GNSS+IMU”的組合導航系統是絕大部分廠商都會選擇的方案,部分廠商選擇了在GNSS+IMU 的基礎上增加了傳感器與高精度地圖進行融合定位的方案。
 主要自動駕駛乘用車的高精定位方案
主要自動駕駛乘用車的高精定位方案
 主要商用場景自動駕駛定位方案
主要商用場景自動駕駛定位方案
厘米級的高精度定位傳感器是L3 級及以上自動駕駛的標配。 高精度定位傳感器主要部件包括高精度定位芯片(射頻、基帶)、IMU、天線、板卡等。成本方面,高精度GNSS 定位加天線的成本在百元級,符合精度要求的IMU 器件成本將長期保持在千元級。GNSS-RTK+IMU 組合的量產價格較高,短期在1000美元左右,隨著規模化量產以及工藝的成熟,整體價格有望在2025 年下降至500 美元。
? 高精度定位芯片 :主要包括射頻和基帶芯片,射頻部分對微弱的模擬信號進行接收、濾波、放大、變頻;基帶部分對碼信號進行解算,其中相關器模塊實現對碼信號的讀取;目前北斗芯片已不輸于GPS,3 米的普通精度車載導航芯片價格不超過6 元,幾十厘米定位精度的高精度芯片,價格在幾十元到數百元不等;
? IMU :價格和精度高度正相關,產品競爭核心在于平衡高精度和低成本。主要被海外壟斷,目前主要的供應商包括ADI、Honeywell、NorthropGrumman 等;
? GNSS 板卡+天線:高精度板卡是高精度GNSS 終端設備的核心,其成本占到終端總成本的60%以上,技術門檻非常高,長期被美國Trimble 和加拿大NovAtel 壟斷,目前國產高精度板卡銷量市占率30%左右;我國北斗天線的國產替代率較高,國內市場份額占比超75%。
空間測算:預計到2025 年全球衛慣市場空間225 億元,高精度地圖市場空間約90 億元
小鵬P5 與P7、紅旗E-HS9、蔚來ET7 等都標配了高精度定位模塊。以GNSS-RTK+IMU 組合為例,目前,車載慣性導航的單車價值量在1000-2000元左右,定位精度要求不同,價格有所差異,GNSS-RTK+IMU 組合的量產價格目前大約在1000 美元左右,預計到2025 年有望下降到500 美元左右,假設到2025 年GNSS-RTK+IMU 組合單車價值量約在3000 元左右,假設L3 及以上的滲透率為12%,對應2025 年全球衛慣組合的市場規模約為225 億元,對應遠期2030 年市場空間660 億元。而對于高精度地圖而言,高精度地圖的收費主要分為一次性License 費用和后續每年的訂閱費,License 費用約1000 元左右,訂閱費為100 元/年。高精度地圖作為L3 以上車型的標配,對應2025年全球市場規模約在90 億元左右。
相關公司:四維圖新、華測導航、中海達、千尋位置
四維圖新:國家測繪局體系支撐的中國導航地圖產業開創者
四維圖新成立于2002 年,中國導航地圖產業的開拓者,專注于商業化車載導航地圖,公司第一大股東中國四維測繪技術有限公司由國家測繪局創建,是唯一從事專業測繪的國家級公司。公司致力于以高精度地圖、高精度定位、云服務平臺、車規級芯片等業務打造“智能汽車大腦”。2020 年,公司在高精度地圖市場的市占率為22%,僅次于百度排名第二。公司長期與主流歐美品牌、日系品牌、國內自主品牌、造車新勢力等車企保持持續合作,是高精度地圖領域的絕對龍頭。
 四維圖新的客戶及合作伙伴
四維圖新的客戶及合作伙伴
華測導航:北斗導航龍頭,切入車規級高精度定位傳感器
華測導航,成立于2003 年,是一家專注于北斗高精度衛星導航的高新技術企業,致力于提供高精度數據的采集和應用解決方案,專業從事高精度衛星導航定位相關軟硬件技術產品的研發。公司以高精度導航定位技術為核心,經過多年的研發投入和探索,已經形成有技術壁壘的核心算法能力,擁有自主可控毫米級/厘米級高精度算法,具備高精度RTK、PPP、靜態解算、網絡RTK、精密定軌技術、組合導航定位技術、多源融合定位技術等完整算法技術能力。公司已經研發出高精度GNSS 基帶芯片“璇璣”、多款高精度GNSS 板卡、模組、天線等基礎器件,突破“卡脖子”技術,實現了核心技術自主可控。此外,公司已通過IATF16949 車規標準認證,可為車企、自動駕駛方案商提供端到端的滿足ASIL-B 要求的車規級高精度定位解決方案,公司已經被指定為哪吒汽車和浙江省某車企的自動駕駛位置單元業務定點供應商。
 華測導航的北斗地基增強系統+GNSS/INS 組合導航系統
華測導航的北斗地基增強系統+GNSS/INS 組合導航系統
中海達:深耕北斗導航產業,布局高精度定位賽道
中海達,成立1999 年,是國內高精度衛星導航定位產業的領先企業。公司在自動駕駛車載高精度領域,主要提供車載高精度傳感器,組合定位模塊/天線/算法、組合導航集成方案等;高精度地圖前端數據采集系統、眾包采集裝備及后端數據處理軟件平臺和數據采集加工服務;提供星基與地基增強技術融合在車端的應用。公司的車載高精度產品目前已已應用在小鵬汽車、上汽集團等汽車制造企業和自動駕駛方案商,目前公司正在持續進行多款智能汽車車載高精度產品的定點測試工作,已完成多款量產車型的定點測試。
 中海達的高精度定位天線平臺已經在上汽榮威鯨試用
中海達的高精度定位天線平臺已經在上汽榮威鯨試用
千尋位置:提供厘米級定位服務,打造數字時代時空智能基礎設施
千尋位置,于2015 年由中國兵器工業集團和阿里巴巴集團合資成立,公司主要基于北斗衛星系統(兼容GPS、GLONASS、Galileo)基礎定位數據,利用北斗地基增強站以及星基增強系統和自主研發的定位算法,通過互聯網技術進行大數據運算,為全球用戶提供厘米級定位、毫米級感知、納秒級授時服務。目前,公司有2800+地基增強站,總用戶數超過10 億,服務覆蓋230 多個國家和地區,日處理數據位置10 億次。
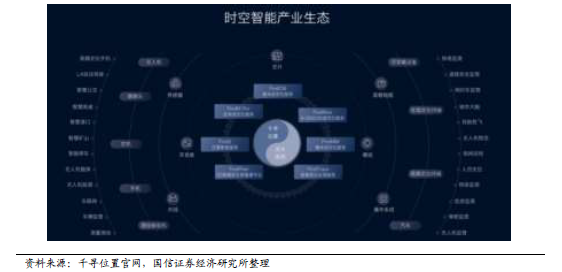 千尋位置打造的時空智能產業生態
千尋位置打造的時空智能產業生態
-
衛星導航
+關注
關注
3文章
225瀏覽量
26985 -
感知系統
+關注
關注
1文章
71瀏覽量
15948 -
慣性導航
+關注
關注
2文章
57瀏覽量
13477
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論