 風扇速度控制很酷
風扇速度控制很酷
基于溫度的風扇控制在越來越多的系統中是必要的,既可以降低系統噪音,又可以提高風扇可靠性。當風扇控制通過風扇速度監控增強時,可以實現獨立于制造差異和風扇磨損的速度控制回路。此外,可以識別即將發生故障的風扇,以便在發生故障之前對其進行更換。本文討論MAX6650和MAX6651這兩款具有線性閉環風扇速度控制的風扇控制器的工作原理。
介紹
隨著IC設計人員努力將更多以更高速度運行的晶體管放入更小的封裝中,結果只有一個:熱量!再加上這些高功率IC被設計成不斷縮小的盒子,你最終會遇到一個真正的熱管理問題。對于許多應用,這意味著使用風扇。不幸的是,隨著風扇的使用,機械故障、功耗增加和噪音增加等常見的風扇頭痛。風扇速度控制和監控可以緩解其中一些頭痛,從而產生更安靜、更可靠的風扇,使用更少的功率。
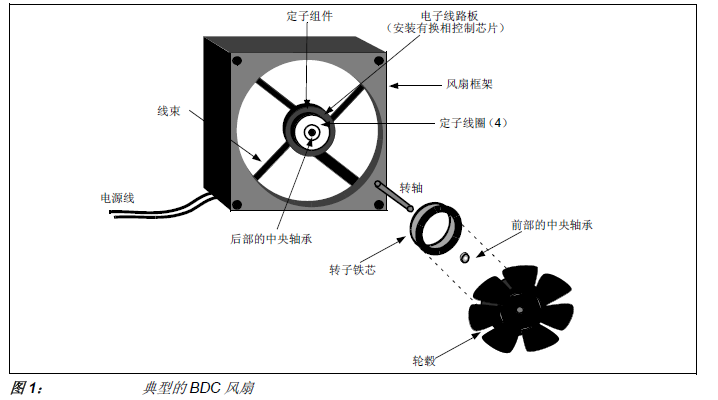
無刷直流風扇
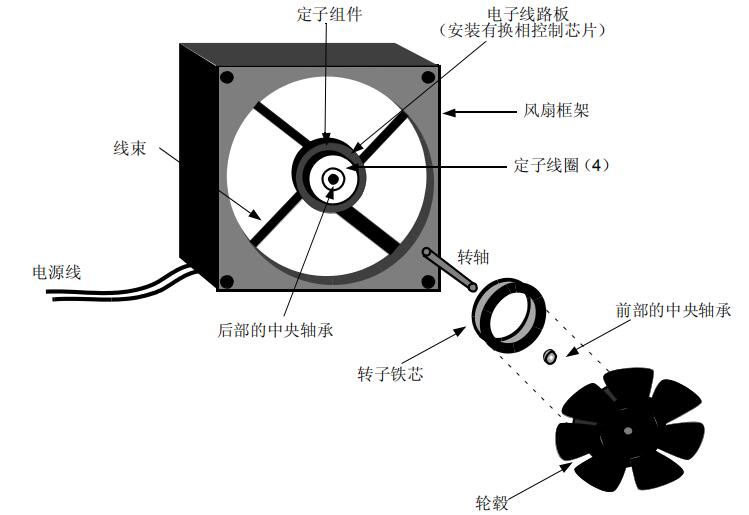
在我們進入監管和監控風扇的主題之前,我們首先需要了解風扇本身。無刷直流風扇往往是大多數電子外殼的首選解決方案。這些風扇將高可靠性與易用性相結合。基本的直流無刷風扇是一個 2 線設備,在其上施加直流電壓。僅此而已。最簡單的系統冷卻方法是將風扇連接到直流電源并讓它運行。快速瀏覽風扇目錄會發現,可以使用標稱 5V、12V、24V 或 48V 工作的風扇。目前,12V風扇似乎是使用最廣泛的。隨著越來越多的系統設計沒有12V電源,5V風扇可能會變得更加普遍。在電信應用中,48V風扇特別受歡迎。
無刷直流風扇被稱為“無刷”,因為風扇內的電動機是電子換向的。較舊的直流風扇使用機械刷,由于整個系統的機械磨損,這可能會導致電磁干擾 (EMI) 增加以及灰塵顆粒。隨著時間的推移,風扇會磨損并最終失效。無刷風扇已經用電子傳感器和開關取代了這些機械電刷,現在執行必要的換向。該換向電路安裝在風扇本身內,對用戶完全透明。最終結果是一個簡單易用、可靠的2線器件。這大大提高了這些風扇的使用壽命和可靠性。
對于最終用戶來說,直流無刷風扇的電氣特性相當簡單。隨著施加到風扇的直流電壓的變化,其速度和電流消耗也會變化。對于一階,速度和電流與施加的直流電壓成正比。參見圖 1 和圖 2。
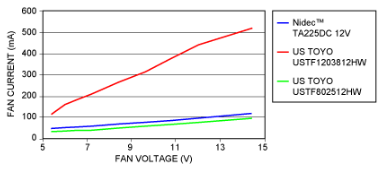
圖1.風扇電流與風扇電壓的關系(12V 額定風扇)。
圖2.風扇速度與風扇電壓的關系(12V 額定風扇)。
風扇監控選項
盡管無刷換向在提高風扇的使用壽命和可靠性方面取得了長足的進步,但它們仍然是機械設備,容易出現機械磨損和故障。隨著時間的推移,風扇速度和冷卻效率會慢慢降低或完全失效。這就是為什么持續監控風扇狀況很重要的原因。大多數風扇制造商都提供了多種方法來做到這一點。這些選項大致分為兩類:報警傳感器和速度傳感器。報警傳感器通常發出數字信號,指示風扇已降至某個速度閾值以下或已完全停止。例如,依必安派特公司提供了一個選項,每當風扇速度下降到其標稱速度的75%至85%時,就會產生一系列低調的數字脈沖。NMB Technologies提供了一個略有不同的選項,稱為“鎖定轉子報警信號”。每當風扇完全停止旋轉時,此信號就會變高。
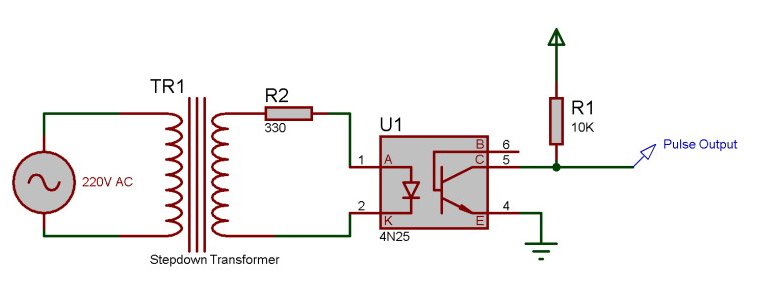
制造商還提供帶有速度傳感器的風扇,這些傳感器提供數字輸出,其頻率與風扇速度成正比。最常見的速度傳感器每轉提供兩個脈沖。根據制造商和提供的選件,速度和報警傳感器都可以訂購集電極開路或內部上拉輸出。內部上拉輸出可以與TTL兼容,也可以擺動風扇的全電源電壓。圖3顯示了依必安派特公司提供的輸出級。需要注意的是,報警和速度傳感器與電機及其換向電子設備共享相同的電源電壓。為控制風扇速度而對電源電壓的任何變化也會影響換向電子設備和速度/報警傳感器。
圖 3a.該速度傳感器輸出為集電極開路,具有弱上拉電阻,不一定與TTL兼容。
圖 3b.連接到該速度傳感器輸出的齊納二極管可確保TTL兼容性。
圖 3c.這種集電極開路速度傳感器輸出可實現最大的靈活性,但只需一個外部上拉電阻器。
為什么要使用速度控制?
為應用選擇風扇時,必須針對最壞情況進行設計。這意味著選擇能夠移動足夠空氣的風扇,以保持系統充分冷卻,即使在最壞的環境溫度、功耗、風扇生產公差和風扇老化的情況下也是如此。現實情況是,該系統將在最壞的情況下花費大部分時間。在這一點上,應該很明顯的是,在大多數情況下,風扇速度可以降低而不會對系統產生不利影響,并且只有在條件需要時才增加。不太明顯的是為什么要打擾風扇速度控制呢?
降低可聞噪音
風扇速度控制最明顯的優勢之一是緩解您的耳朵。全速運行的風扇可能是一個重要的煩惱來源,特別是對于在安靜的辦公環境中使用的設備。大多數辦公室的溫度通常明顯低于電子設備的設計運行溫度,這意味著可以降低風扇速度而不會產生不利影響,這讓聽覺距離內的每個人都松了一口氣。
降低功耗
筆記本電腦等應用將受益于降低的功耗。圖 4 顯示了三種不同風扇的典型功耗與風扇速度的關系。功耗可以近似為風扇速度的平方。以圖4中的日本電產風扇為例,在69V時將風扇速度降低到標稱值的12%,可將功耗降低一半。
圖4.功耗與風扇速度的關系。
延長使用壽命
降低風扇速度也會減少風扇的磨損。風扇磨損是風扇絕對轉數的粗略函數。減少磨損意味著更長的使用壽命,因此平均故障間隔時間 (MTBF) 更長。由于風扇是機械的,因此它們往往是系統中最常見的故障之一。任何可以改善風扇MTBF的措施也會導致終端設備中的MTBF顯著增加。這在服務器和網絡設備等系統中尤其重要。
減少堵塞
任何打開舊設備的人都知道,灰塵似乎被電子產品所吸引,尤其是在帶有風扇的系統中。當灰塵聚集在帶有風扇的系統的入口和排氣口時,氣流可能會減少或完全停止。當然,這會導致冷卻減少和溫度升高。降低風扇速度可以降低系統收集灰塵的速度,從而延長系統的使用壽命。
速度控制方法
現在我們更好地了解了直流無刷風扇、它們的可用選項以及速度控制的好處,我們將研究三種控制速度的方法。每種方法在成本與性能方面都進行了權衡。
直接脈寬調制
脈寬調制 (PWM) 風扇直接涉及以固定頻率打開和關閉風扇的電源。進行占空比調整以控制風扇的速度。占空比越大,風扇旋轉得越快。為此方法選擇合適的頻率可能有些棘手。如果PWM信號的頻率太慢,風扇的速度將在PWM周期內明顯振蕩。為了說明這一點,請采用50%占空比,0.01Hz驅動信號的荒謬極端。風扇將在前 50 秒內全速旋轉,然后在接下來的 50 秒內停止。頻率也可能太高,因為換向是使用關閉風扇正負端子的電路以電子方式完成的。將PWM與風扇一起使用,因此內部換向電子設備過快會導致內部換向電子設備停止正常工作。請記住,這些電子設備并非設計用于使用直流電源以外的任何東西。因此,有用頻率范圍為20Hz至160Hz。此外,PWM上升和下降時間必須足夠慢,以確保風扇的長期可靠性。
與所有事情一樣,直接應用PWM有其優點和缺點。優點包括非常簡單的驅動電路(見圖8a和8b)、良好的啟動特性以及調整管的最小散熱。缺點包括風扇壓力增加以及無法使用速度或警報傳感器。請注意,速度和報警傳感器的電源電壓與電機相同。由于電源電壓以20Hz至160Hz的速率上電和關閉,因此速度和報警電路也會上下電,從而有效地使速度和報警傳感器失效。
在PWM控制期間,施加到風扇的電壓是其額定電壓(12V風扇為12V)或0V。但是,由于風扇以低于其額定速度的速度旋轉(請記住,這就是整個想法),因此其反電動勢會降低。這會導致在PWM周期的導通期間流過繞組的電流高于標稱值。盡管風扇設計用于處理增加的電流,例如在啟動期間,但在風扇的使用壽命內,每秒 30 次的電流增加可能會導致負面的可靠性問題。但即使有這些缺點,PWM控制也可能是低成本非關鍵應用中的合適解決方案。
線性調節
顧名思義,“線性調節”通過使用線性穩壓器來調節風扇兩端的直流電壓。使用此方法時,請務必確保風扇指定為在很寬的電壓范圍內工作。與PWM相比,線性調節的一個主要優點是它允許使用速度和報警傳感器。不幸的是,線性調節也有其缺點:主要是調整元件的功耗,以及啟動和失速問題。
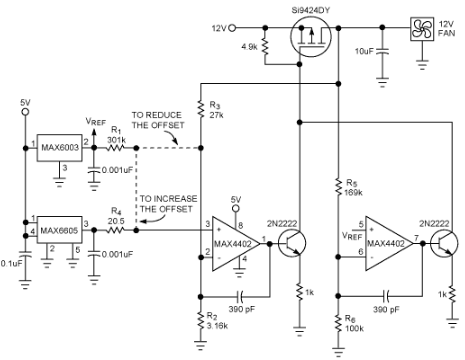
線性穩壓器控制風扇兩端的直流電壓。他們通過以熱量的形式耗散功率來做到這一點。為了冷卻某些東西而產生熱量似乎很愚蠢。但這并不像你想象的那么荒謬。在最大和最小冷卻期間,理想情況下功耗為零。在最大冷卻期間,調整元件完全開啟,因此其兩端的電壓幾乎為零。零伏意味著零功耗。在最小冷卻期間,調整元件關閉(零電流流過),因此功耗再次為零。如前所述,風扇的電流消耗可以近似為所施加電壓的線性函數,使其看起來是電阻性的。考慮到這一點,最壞情況下的功耗大約發生在風扇兩端的電壓是其最大工作電壓的一半時。參見圖 5。這意味著通過元件中的最壞情況功耗可以通過以下公式估算:P = 1/4(V.MAX× I.MAX),其中我.MAX和 V.MAX分別是風扇的額定電壓和電流。例如,當采用1V電源以2V工作時,12.98W風扇(300V/6mA)在調整元件上的最差功耗僅為12mW。令人欣慰的是,風扇電路的最大散熱發生在最低冷卻要求期間。此外,即使使用功耗設備,當風扇速度降低時,總體上仍可節省功耗。參見圖 6。
圖5.線性穩壓器調整元件的功耗與風扇電源電壓的關系
圖6.線性調節風扇電路的總功耗。
啟動和停頓問題是相關的。風扇在啟動之前需要一定的電壓。這稱為“啟動電壓”。一旦風扇已經旋轉,將電壓降低到失速電壓以下將導致風扇停止。啟動電壓等于或(通常)大于失速電壓。通常它們是風扇額定電壓的 25% 到 50%。當使用線性調節而不進行速度監控時,無法知道風扇是否已經停止甚至啟動。
此問題有幾種解決方案。一種是防止風扇兩端的電壓低于啟動電壓。雖然這在軟件中很容易實現,但選擇正確的電壓以確保所有風扇正確啟動并考慮老化可能會限制速度控制的有用范圍。您可能必須選擇標稱值為 60% 的最小最壞情況電壓,以確保所有風扇都能啟動。考慮到普通風扇可能很容易控制在 40% 以上,這可能是浪費。另一種解決方案是使用帶轉速表的風扇。轉速表現在可以通過微控制器進行監控,允許軟件知道風扇何時未啟動或是否停止。盡管這種方法更加健壯且浪費更少,但它需要設計時間和額外的硬件/軟件資源。
直流-直流調節
DC-DC調節類似于線性調節,因為它通過調節風扇兩端的直流電壓來控制風扇的速度。但是,與線性穩壓器不同,DC-DC穩壓器使用開關模式電源。由于這兩種方法都通過調節直流電壓來控制速度,因此它們往往具有相同的優點和缺點。然而,一個例外是DC-DC穩壓器理想情況下效率為100%,并且不會產生任何熱量(實際效率往往約為75%至95%)。這種效率的代價是增加了成本和復雜性(見圖8e和8f)。盡管 DC-DC 穩壓器往往效率更高,但在全風扇速度下,不會真正節省功耗(參見圖 7)。只有當風扇速度從最大值降低時,使用 DC-DC 穩壓器才能獲得真正的收益。當風扇兩端的電壓是最大可用電壓的一半時,就會產生最大的效率優勢。發生這種情況的原因與線性穩壓器在電源電壓的一半相同時耗散其最大值的原因相同。由于 DC-DC 轉換器的成本和復雜性增加以及節能有限,DC-DC 穩壓器通常保留用于電池供電系統或使用大功率風扇或大量風扇的系統。與往常一樣,對于所有DC-DC轉換器,在布局過程中必須小心。
圖7.日本電產TA225 12V風扇加驅動電路的總功耗。
高邊驅動與低邊驅動
上述三種方法都可以使用高邊或低邊驅動晶體管進行設計(見圖8)。由于電平轉換,高端驅動需要稍微復雜的電路,但它的優點是將風扇的負極端子保持在地上。因此,速度和報警傳感器現在是以地面為參考的,并且更容易與它們連接。
圖 8a. PWM 驅動器,低側。
圖 8b. PWM 驅動器,高壓側。
圖 8c.線性調節,低側。
圖 8d.線性調節,高側。
圖 8e. DC-DC 模式,低側。
圖 8f. 直流-直流模式,高壓側。
相比之下,低邊驅動不需要驅動晶體管的電平轉換器,但需要對速度和報警傳感器進行某種類型的轉換。使用低側驅動晶體管時,風扇的正極端子保持在恒定的12V(假設風扇為12V),而風扇的負極端子則上下調節以控制速度。不幸的是,速度和報警傳感器共享風扇的負極端子,并隨著風扇速度進行調整,導致需要電平轉換。
應用信息
無轉速表的速度控制
圖 9 和圖 10 給出了兩個風扇電路示例,這些電路是為不需要報警或速度傳感器的系統設計的。圖9所示,MAX1669配置為在PWM模式下驅動風扇。圖10所示為MAX1669配置為直流線性模式。
MAX1669既是溫度傳感器又是風扇控制器。
圖9.MAX1669以PWM模式驅動風扇。
圖 10.MAX1669配置為直流線性模式。
這兩個模塊彼此獨立工作,旨在與微控制器一起使用。MAX1669與微控制器之間的通信通過SMBus兼容接口完成。SMB接口為2線串行接口,與I2C接口非常相似,通常向后兼容。
MAX1669使用遠端安裝的二極管報告外部溫度。圖9和圖10所示為MAX1669,使用2N3906作為該二極管連接。某些IC的芯片上有時會包含類似的二極管。一個例子是Virtex系列零件。這些器件有兩個引腳,分別標記為 DXN 和 DXP。將MAX1669直接連接到這些引腳,可以直接測量管芯溫度。這允許風扇電路更嚴格地控制特定IC的管芯溫度。它還消除了將溫度傳感器安裝到IC封裝、熱時間常數以及必須進行熱阻計算的后顧之憂。?
該電路(以及討論的其他電路)在溫度方面要么作為開環運行,要么作為閉環運行。當作為開環運行時,溫度傳感器通過將傳感器安裝在設備的入口處來測量環境溫度。隨著環境溫度的升高,風扇速度在軟件控制下增加。在這種配置中,理想情況下,增加或減少風扇速度對測量的溫度沒有影響。因此,該系統沒有形式的熱反饋,并且是開環的。因為它是開環的,所以沒有穩定性問題,因此軟件設計更簡單。但是,沒有直接的方法可以知道需要冷卻的組件的實際溫度。例如,如果由于部分堵塞的入口或風扇老化而導致冷卻效率降低,則這種類型的控制將無法知道并因此進行補償。這意味著系統的設計必須使風扇旋轉得比所需的快,從而導致系統不理想。
將溫度傳感器放置在風扇設計用于冷卻的位置,形成閉環系統。增加風扇的速度會導致測量溫度下降。現在需要注意穩定性問題。這種關注會導致更長的開發時間和更高的軟件復雜性,但可以直接、更嚴格地控制熱源。現在,可以將風扇速度調節到所需的最低速度,以將關鍵組件保持在預定溫度以下。此外,對于入口和出口部分堵塞等問題,將自動進行補償。在這兩種情況下,硬件設計是相同的。唯一的區別是溫度傳感器和軟件代碼的位置。
使用轉速表進行速度控制
上述電路在低端系統中運行良好,我們不太關心可靠性。然而,在我們重視可靠性的系統中,這些電路可能不足。在開環溫度控制的情況下,系統無法檢測到任何類型的風扇故障。閉環控制中的高溫可以作為指示,但仍有改進的余地。溫度升高表示系統存在問題,但無法區分入口和出口堵塞、環境溫度高、內部散熱過多或風扇故障。此外,由于熱量是問題的主要指示,由于熱響應緩慢,可能需要一段時間才能注意到這些問題。一個例子是一支鉛筆突然卡在風扇里。可能需要幾分鐘時間,溫度才會升高到足以標記問題。
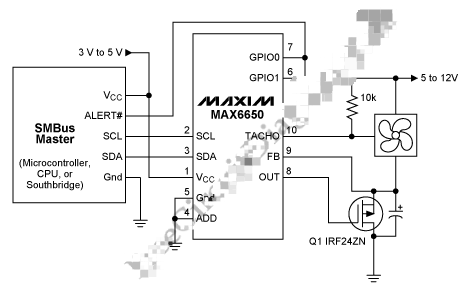
轉速計輸出(速度傳感器)可以解決這些問題。圖11所示為使用帶轉速計的風扇的電路。MAX6625測量溫度,并通過I2C兼容的2線接口報告給微控制器。相同的2線接口向MAX6650發出命令,控制風扇的速度。MAX6650具有所有必要的電平轉換和硬件,可與風扇的集電極開路轉速表連接。風扇速度可以通過 SMBus 兼容接口讀取為字節寬的整數。
圖 11.MAX6650通過轉速計輸出與風扇接口,用于監測和控制風扇速度。MAX6625可以連接到同一I2C兼容總線,用于監控溫度。
MAX6650可用作風扇速度控制器或風扇速度調節器。區別是微妙但重要的。風扇速度控制器控制風扇兩端的電壓,從而間接控制其速度。風扇速度調節器實際上使用其轉速表測量和調節風扇的速度。當MAX6650用作風扇速度控制器時,微控制器通過SMBus兼容接口讀取MAX6625的溫度和MAX6650的風扇速度。然后微控制器向MAX6650發出DAC代碼。這些DAC代碼直接控制風扇兩端的電壓,從而間接控制其速度。然后,微控制器必須通過MAX6650不斷讀取風扇速度,并對DAC進行調整,以保持風扇速度在調節范圍內。這在風扇的啟動和失速速度方面變得尤為重要。
當MAX6650配置為風扇速度調節器時,微控制器發出速度命令。MAX6650自動監測和調整風扇速度,使其保持在調節范圍內。一旦寫入所需的速度,微控制器就不需要進一步參與。這大大減少了軟件開銷。如果MAX6650不能保持所需的速度,它可以以中斷微控制器的形式發出警報。
與圖9和圖10中的電路類似,圖11和圖12中的電路可以在溫度開環或閉環系統中運行。需要注意的是,在溫度閉環系統中,現在有兩個閉環:一個用于溫度調節,另一個用于風扇速度調節。必須格外小心,防止出現穩定性問題。
由于風扇控制通常依賴于微控制器,因此它也取決于軟件。軟件可以表現出許多類型的問題,包括無限種類的循環。在基于 PC 的系統中,病毒甚至可能故意引起問題。此類問題可能需要某種類型的備份以防止損壞。圖 12 顯示了這樣的備份。
圖 12.在圖6501電路中增加MAX11溫度開關,提供獨立于軟件工作的故障安全溫度備份。
MAX6501是一款小尺寸、廉價、數字輸出溫度傳感器。當溫度上升到某個閾值以上時,其輸出拉低。MAX6650可配置為監視其通用輸入/輸出(GPIO1)引腳,當其被拉低時,器件將自動全速打開風扇。這將獨立于通過軟件發出的命令而發生。通過將MAX6501戰略性地放置在關鍵區域,可以避免問題。值得注意的是,這種類型的備份保護不僅可以防止軟件問題,還可以防止不太可能的主要溫度傳感器故障和微控制器硬件故障。由于MAX6501具有集電極開路輸出,可將多個器件連接在一起,安裝在單元內的多個位置。這允許同時保護多個關鍵位置。
多個風扇作為一個組進行控制
圖 13 是圖 11 的變體。有時需要將多個風扇作為一個組進行控制。圖13所示為MAX6651將三個風扇作為一個單元進行控制。MAX6651與MAX6650類似,但具有額外的GPIO和轉速表監測輸入。由于所有三個風扇并行運行,因此無法獨立調節每個風扇的速度。必須選擇一個風扇作為主站,圍繞該風扇關閉任何調速回路。當處于穩壓模式時,MAX6651閉合連接到TACH0的風扇周圍的速度環路。當MAX6651用作風扇速度控制器時,微控制器可以閉合任何一個風扇周圍的環路。雖然MAX6651不直接調節其余風扇的速度,但如果使用相同的風扇,它們將傾向于以相似的速度運行。為了確保未穩壓風扇正常工作,MAX6651允許微控制器通過SMBus兼容接口讀取每個風扇的速度。這樣,如果任何一個風扇超出容差范圍,就可以標記用戶。MAX6651可直接連接多達<>個風扇。
圖 13.MAX6651將三個風扇作為一個單元控制。
圖14顯示了如何使用模擬多路復用器監視四個以上的風扇。GPIO2、GPIO3 和 GPIO4 配置為輸出。這些位可以通過SMBus兼容接口進行切換,以控制哪個風扇的轉速表連接到TACH3輸入。
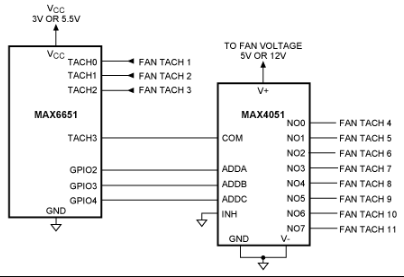
圖 14.此圖顯示了如何使用模擬多路復用器監視四個以上的風扇。
N+1 和熱插拔應用
當風扇出現問題時,需要采取適當的措施。有時只需關閉系統以防止損壞即可。但是,在需要最大限度地減少停機時間的系統中,這不是一個很有吸引力的選擇。圖 15 顯示了一個應用程序,即使在風扇故障期間,系統也能繼續運行。該電路使用一種通常稱為N+1的技術。N+1 是在最壞情況下使用比實際需要的多一個風扇的做法。這允許在任何一個風扇發生故障時進行足夠的冷卻。此外,所有風扇應放置在單獨的卡上,并設計為可以熱插拔。這允許在設備運行時卸下和更換損壞的風扇,從而防止任何停機時間。
圖 15.當用于N+1應用時,MAX6651可以配置為在風扇發生故障時自動全速運行。還顯示了如何配置電路以允許熱插拔。
在大多數情況下,正在運行的風扇比實際需要的要多,因此降低風扇速度變得更加重要。但是,如果風扇發生故障,剩余的風扇需要以最大速度旋轉。此外,需要通知用戶卸下和更換損壞的風扇。
在圖15中,MAX6651通過SMBus兼容接口進行配置,當它們無法保持所需的風扇速度時,在GPIO0上產生邏輯低電平。這些輸出(帶內部上拉的漏極開路)連接在一起。因此,三個風扇中的任何一個無法保持所需的速度(由于故障)都會導致這條線變低。然后將同一條線連接到所有 GPIO1 引腳。這些引腳配置為輸入,當應用邏輯低電平時,這些引腳將全速打開各自的風扇。這樣,風扇故障會自動導致所有風扇全速旋轉。另一個好處是不需要微控制器的參與。
每當出現問題時,微控制器都可能需要中斷。如圖所示,通過將 GPIO0 連接到中斷引腳可以輕松實現這一點。通過這樣做,微控制器現在可以通過SMBus兼容接口讀取風扇的速度來確定哪個風扇出現故障。有了這些知識,它就可以標記用戶更換適當的風扇。MAX2的GPIO6651可通過SMBus兼容接口(或微控制器上的輸入引腳,如果可用)讀取,以檢測風扇何時被移除或插入。
同步風扇
由于風扇之間的拍頻,使用多個風扇的系統可能會遇到額外的噪音刺激源。與多引擎飛機所經歷的效果類似,兩個風扇以略有不同的速度旋轉會產生跳動噪音。噪聲的頻率與速度差異有關。這種影響可能是微妙的,對于大多數單位來說通常不是問題。但是,對于高端系統,我們可能希望盡可能多地消除噪音刺激。顯而易見的解決方案是以完全相同的速度旋轉風扇。圖 16 顯示了一個執行此操作的應用程序。
圖 16.在該應用中,MAX6651配置為使用相同的振蕩器,從而最大限度地減少風扇之間的速度變化。這減少了多個風扇系統中的跳動噪音。
嘗試讓獨立風扇以相同的速度旋轉的主要問題是每個MAX6651都有自己的時基(振蕩器頻率)。這些時基足夠精確,可以單獨控制風扇速度,但不夠精確,無法防止在多風扇系統中發生跳動。通過配置所有MAX6651使用相同的振蕩器,可以消除誤差源。為此,MAX6651可以將其GPIO2引腳配置為振蕩器輸入或輸出。將第一個MAX6651配置為時鐘輸出,其余配置為時鐘輸入,它們都將以相同的頻率運行。現在,所有部件都以相同的時鐘運行,可以實現嚴格的速度公差。
結論
風扇速度控制有助于提高可靠性、降低功耗和降低系統噪音。在價格和性能的權衡方面,可以選擇許多不同的電路和選項。本文提供了一些有關與實現此類控制相關的各種問題的見解和可能的解決方案。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7552瀏覽量
151426 -
控制器
+關注
關注
112文章
16361瀏覽量
178071 -
振蕩器
+關注
關注
28文章
3832瀏覽量
139094
發布評論請先 登錄
相關推薦
怎么實現使用智能手機控制風扇速度
BLDC 風扇的可變速度控制算法
剖析風扇速度控制器原理
如何使用Arduino生成的PWM來控制交流風扇的速度
使用Arduino和晶閘管(TRIAC)控制交流風扇的速度

加快風扇速度控制設計
風扇控制的進步:考慮風扇速度調節





 工商網監
工商網監
評論